一种基于异构多柔性臂空间机器人的在轨目标安全捕获方法及系统
1.本发明属于异构多柔性臂空间机器领域,具体涉及一种基于异构多柔性臂空间机器人的在轨目标安全捕获方法及系统。
背景技术:
2.研究表明,绝大多数失效或故障卫星在太空中处于翻滚状态,对空间抓捕机器人而言为非合作目标。为实现非合作翻滚目标的安全抓捕,要求空间机器人的抓捕机构与被捕目标姿态高度同步,同时又必须保证抓捕过程的双边安全。研发能够对失效卫星实施在轨安全抓捕的空间机器人,成为航天科技领域亟待攻克的难题之一。
3.目前对失效卫星的抓捕主要包括机械臂抓捕、爪式抓捕、飞网抓捕及绳系抓捕等几种抓捕方式,但在抓捕待修复的故障卫星或待加注燃料的再利用卫星时,会使得被捕目标损伤而无法应用,需要研究更为安全柔顺的抓捕机构。
4.近年来,一种超冗余连续型机械臂因具有可连续弯曲变形、结构与细长、质量轻和灵巧的突出特点,在对空间目标包络抓捕方面具有明显优势,是抓捕失效卫星的理想机构。
5.目前国内尚未见基于异构多柔性臂空间机器人在轨捕获目标系统和方法的相关报道和专利文献。
技术实现要素:
6.基于以上所述的问题,本发明的目的在于提供一种基于异构多柔性臂空间机器人的在轨目标安全捕获方法及系统,使用多柔性臂在不损伤失效卫星的情况下,完成对失效卫星的消旋捕捉以及固连,以便后续维修等工作的开展。
7.一种基于异构多柔性臂空间机器人的在轨目标安全捕获系统,包括异构多柔性臂空间机器人;
8.所述异构多柔性臂空间机器人包括智能感知模块,超冗余连续型机械臂和柔性关节机械臂;
9.所述智能感知模块包括图像采集装置和传感器,所述多个超冗余连续型机械臂设置在智能感知模块上,并基于智能感知模块采集的目标运动信息捕获在轨目标;
10.所述柔性关节机械臂设置在智能感知模块上,用于对捕获的在轨目标进行固连,所述柔性关节机械臂的末端设置缓冲装置。
11.进一步的,所述超冗余连续型机械臂上均匀包裹一层柔性减速刷作为包络;
12.所述智能感知模块上设置多组双目视觉相机及传感器。
13.基于上述系统的一种基于异构多柔性臂空间机器人的在轨目标安全捕获方法,包括以下步骤:
14.步骤1、异构多柔性臂空间机器人靠近待捕获目标,获取目标相关图像;
15.步骤2、根据待捕获目标的位置,完成异构多柔性臂空间机器人的多超冗余连续型
机械臂的路径规划;
16.步骤3、异构多柔性臂空间机器人对待捕获目标进行捕获;
17.步骤4、对捕获的目标进行固连,完成异构多柔性臂空间机器人对在轨目标的安全捕获。
18.本发明与现有技术相比,其显著优点在于:
19.(1)本发明的技术方案通过设计的非接触式感知测量方法,实现对待捕获目标的快速和精准的位姿测量;
20.(2)本发明的技术方案利用连续型机械臂质量轻、柔顺灵活的特点以及柔性关节机械臂高稳定性与负载能力,通过多柔性空间机器人系统力/位置混合控制方法和多模包络策略,实现对失效卫星的消旋与捕获,在实现对非合作目标捕获的同时,保证目标的安全完好,提供了一种安全且泛用性较强的失效卫星抓捕方法。
21.下面结合附图对本发明作进一步详细描述。
附图说明
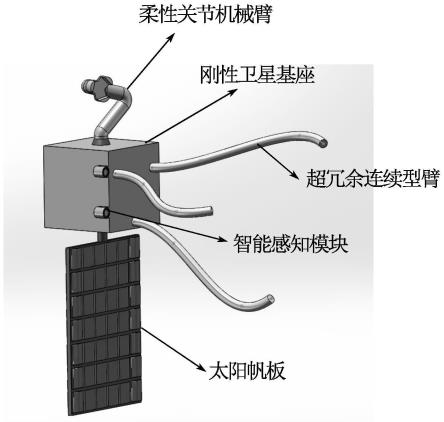
22.图1为本发明的基于异构多柔性臂空间机器人的在轨目标安全捕获系统的一个较佳实施例的结构示意图。
23.图2为本发明的基于异构多柔性臂空间机器人的在轨目标安全捕获方法的一个较佳实施例中的抓捕阶段过程示意图。
24.图3为本发明的基于异构多柔性臂空间机器人的在轨目标安全捕获方法中的多超冗余连续型机械臂协同包络路径规划流程示意图。
25.图4为本发明的基于异构多柔性臂空间机器人的在轨目标安全捕获方法中的多超冗余连续型机械臂路径多目标优化模型示意图。
26.图5为本发明的基于异构多柔性臂空间机器人的在轨目标安全捕获方法中主被动消旋相结合的“松紧包络”操作流程图。
27.图6为本发明的基于异构多柔性臂空间机器人的在轨目标安全捕获系统中超冗余连续型机械臂外部包裹柔性减速刷示意图。
具体实施方式
28.一种基于异构多柔性臂空间机器人的在轨目标安全捕获系统,包括异构多柔性臂空间机器人;
29.所述异构多柔性臂空间机器人以带有单帆板卫星为基座,还包括智能感知模块,超冗余连续型机械臂和柔性关节机械臂;
30.所述智能感知模块包括图像采集装置和传感器,用于测量目标运动信息,智能感知模块可以安装在单帆板卫星的侧壁;
31.所述多个超冗余连续型机械臂设置在智能感知模块上,并基于智能感知模块采集的目标运动信息捕获在轨目标;
32.所述柔性关节机械臂设置在智能感知模块上,用于对捕获的在轨目标进行固连,所述柔性关节机械臂的末端设置缓冲装置。
33.进一步的,所述超冗余连续型机械臂上均匀包裹一层柔性减速刷作为包络;
34.所述智能感知模块上设置多组双目视觉相机及传感器。
35.在轨空间目标抓捕过程主要分为三个阶段:抓捕前抵近观察目标、抓捕过程中安全包络目标和抓捕后稳定固连目标。
36.基于上述系统的一种基于异构多柔性臂空间机器人的在轨目标安全捕获方法,包括以下步骤:
37.步骤1、异构多柔性臂空间机器人靠近待捕获目标,获取目标相关图像,具体为:
38.步骤1-1、失效卫星在轨道上呈现自旋和章动耦合的复杂运动状态,为一非合作目标;
39.在异构多柔性臂空间机器人靠近待捕获目标的过程中,不断对待捕获目标进行完整成像,获取待捕获目标的任意部位和环境背景,同时,对待捕获目标进行多角度环绕成像得到目标的不同姿态、不同角度以及不同背景环境的图像;
40.步骤1-2、分析图像中待捕获目标的背景与自身位置,完成待捕获目标的运动合成与分解和待捕获目标的姿态估计,完成待捕获目标与其翻滚的自旋轴的运动参数辨识;
41.步骤1-3、根据步骤1-2确定的待捕获目标的姿态和运动参数后,调整异构多柔性臂空间机器人自身姿态便于进行捕获操作,抵近待捕获目标。通常需要在目标的多方位多角度位置进行对比,以免由于观测角度影响抓捕操作。
42.步骤2、根据待捕获目标的位置,完成异构多柔性臂空间机器人的多超冗余连续型机械臂的路径规划,具体为:
43.步骤2-1、分析连续型机械臂的关节空间、驱动空间和工作空间之间的关系,利用分段常曲率法构建超冗余连续型机械臂的运动学模型;
44.步骤2-2、利用dh参数法构建柔性关节机械臂的运动学模型;
45.步骤2-3、对抓捕阶段的多超冗余连续型机械臂进行包络空间分析,兼顾多项约束、多项目标安全捕获指标,构建多超冗余连续型机械臂的多目标优化模型,完成异构多柔性臂空间机器人的多超冗余连续型机械臂的路径规划,具体为:
46.使用定性与定量相结合的方法,分层分级地对抓捕阶段的多超冗余连续型机械臂进行包络路径与柔性体振动空间分析,优化多超冗余连续型机械臂末端运动路径使其对非合作目标形成形封闭,并兼顾连续型机械臂形态与目标卫星的相似度、连续型机械臂末端稳态指向精度与稳定度、燃料消耗以及捕获过程中连续型机械臂与失效卫星接触的安全性等多重性能指标,在关节角、速度、加速度与测量装置角速率范围以及操作空间障碍物等多重限制条件下,建立多约束条件下超冗余连续型空间机械臂的多目标优化模型;
47.其中,则多目标优化问题数学模型描述为:
48.min{y=f(x)=(f1(x),f2(x),...,fm(x))}
49.s.t. gi(x)≤0,i=1,2,...,p,
50.hj(x)=0,j=1,2,...q,
51.x∈x∈rn,y∈y∈rm52.其中,x为决策向量,y为目标向量,x为决策向量x形成的决策空间,y为目标向量y形成的目标空间,g(x),h(x)为x需满足的等式与不等式约束条件。
53.应用基于r支配的高维多目标分层算法,寻找基于决策者期望的pareto最优解集,求解高维多目标优化问题。分层算法的底层采用全局搜索能力较强的快速非支配遗传算法
进行精英个体的筛选,上层则采用局部搜索能力较强的骨干多目标粒子群算法进行更加精确的搜索,以提高优化算法的收敛速度。
54.步骤3、到达预定目标位置,异构多柔性臂空间机器人对待捕获目标进行捕获,采用“松包络”和“紧包络”的多模包络策略与主被动相结合的消旋策略,具体为:
55.步骤3-1、抓捕实施阶段初期,控制异构多柔性臂空间机器人的超冗余连续型机械臂形态为抓捕目标的包络形态,并逐渐靠近目标,完成对目标的“松包络”,此阶段保证机械臂不与目标接触;逐步控制多超冗余连续型机械臂的包络的柔性减速刷与失效卫星进行软接触;
56.步骤3-2、抓捕实施阶段中期,控制超冗余连续型机械臂逐步收紧包络形态,实时感知超冗余连续型机械臂与目标接触的外部载荷,直至完成“紧包络”,控制柔性减速刷与失效卫星产生更大的动量交换,进一步降低失效卫星的当前转速;
57.可以说明的是,当异构多柔性空间机器人在实施抓捕过程中,存在局部的“松包络”与“紧包络”相切换的部分,具体的松紧包络状态视目标卫星的具体结构而定;
[0058]“松包络”与“紧包络”可以是一个相互切换循环过程,是在失效卫星自旋转速较高时,使用的被动消旋策略:通过控制柔性减速刷与失效卫星实现软接触,通过动量交换逐渐降低目标动能,直至目标转速低于设定的初始消旋临界转速v1;
[0059]
步骤3-3、当待捕获目标的转速低于初始消旋临界转速v1后,控制超冗余连续型机械臂本体与目标产生适当的力接触,采用主动消旋策略并配合基于柔性减速刷的被动消旋,使目标自旋转速降低至合适抓捕的临界转速v2以下;
[0060]
进一步的,所述主动消旋策略具体为:
[0061]
基于自适应观测器估计超冗余连续型机械臂关节空间加速度反馈,间接感知分布在连续型机械臂上的外部载荷,在此基础上,根据视觉测量确定的消旋平面与标记点计算消旋力矩,采用力/位混合控制律,不断减小多连续臂与失效卫星的相对距离,减小目标卫星转速。
[0062]
可以说明的是,在主动消旋过程中,松紧包络的操作始终在进行。基于柔性减速刷的被动消旋和基于力/位混合控制的主动消旋同时进行,使得多连续型机械臂和目标卫星处于一个动态的软接触,进一步提高消旋的安全性。
[0063]
步骤3-4、实施抓捕末期,在目标卫星与异构多柔性臂空间机器人的相对转速小余适合抓捕的临界转速v2之后,控制超冗余连续型机械臂增大与目标卫星的力接触,使多连续型机械臂贴合目标卫星,实现稳定的抓捕。
[0064]
步骤4、对捕获的目标进行固连,完成异构多柔性臂空间机器人对在轨目标的安全捕获,具体为:
[0065]
抓捕完成后为进行进一步的维修等操作,需实现失效卫星与异构多柔性机械臂空间机器人的固定连接,由于连续型机械臂本身具有一定的柔性,且在复杂的太空环境下,非合作目标与空间机器人之间存在不同程度的相对运动;
[0066]
利用异构多柔性臂空间机器人的柔性关节机械臂末端的缓冲装置,构建缓冲装置的形态变化量与柔性关节机械臂末端传感器之间的动态关系对位置伺服控制器进行补偿控制使异构多柔性臂空间机器人能够在固定时间内、精确且柔顺的完成目标固连。
[0067]
下面结合实施例对本发明做进一步的说明。
[0068]
实施例
[0069]
结合图1,一种基于异构多柔性臂空间机器人的在轨目标安全捕获系统,包括异构多柔性臂空间机器人;
[0070]
所述异构多柔性臂空间机器人以带有单帆板卫星为基座,还包括智能感知模块,超冗余连续型机械臂和柔性关节机械臂;
[0071]
所述智能感知模块包括图像采集装置和传感器,用于测量目标运动信息,智能感知模块可以安装在单帆板卫星的侧壁;
[0072]
所述多个超冗余连续型机械臂设置在智能感知模块上,并基于智能感知模块采集的目标运动信息捕获在轨目标;
[0073]
所述柔性关节机械臂设置在智能感知模块上,用于对捕获的在轨目标进行固连,所述柔性关节机械臂的末端设置缓冲装置。
[0074]
进一步的,所述超冗余连续型机械臂上均匀包裹一层柔性减速刷作为包络,,如图6所示。
[0075]
所述智能感知模块上设置多组双目视觉相机及传感器。
[0076]
结合图2,在轨空间目标捕获过程主要分为三个阶段:抓捕前抵近观察目标、抓捕过程中安全包络目标和抓捕后稳定固连目标。
[0077]
本实施例中的基于异构多柔性臂空间机器人的在轨目标安全捕获系统以带有单帆板卫星为基座,不带帆板基座高度为h,为一正方体,帆板长度为1.25h。以3条超冗余连续型机械臂为目标抓捕机构,连续型机械臂基座位于安装帆板面的相邻面上,彼此之间间隔角为120
°
,距离圆心距离为r,各连续型机械臂外均均匀包络一层柔性毛刷,毛刷长度为l,单连续型机械臂总长为l。
[0078]
柔性关节机械臂作为目标固连机构,安装于安装帆板面的对立面。智能感知模块作为目标运动信息测量单元,安装于超冗余连续型机械臂的两个相邻面,每个面各安装一对双目高清摄像机;
[0079]
本实施例中,目标失效卫星为球体结构,球体半径等于r。
[0080]
在轨空间目标抓捕过程主要分为三个阶段:抓捕前抵近观察目标、抓捕过程中安全包络目标和抓捕后稳定固连目标。
[0081]
基于上述系统的一种基于异构多柔性臂空间机器人的在轨目标安全捕获方法,包括以下步骤:
[0082]
步骤1、异构多柔性臂空间机器人靠近待捕获目标,获取目标相关图像,具体为:
[0083]
步骤1-1、失效卫星在轨道上呈现自旋和章动耦合的复杂运动状态,为一非合作目标;
[0084]
在异构多柔性臂空间机器人靠近待捕获目标的过程中,不断对待捕获目标进行完整成像,获取待捕获目标的任意部位和环境背景,同时,对待捕获目标进行多角度环绕成像得到目标的不同姿态、不同角度以及不同背景环境的图像;
[0085]
步骤1-2、提取目标图像底层点、线、圆特征,利用光束平差法对目标旋转的二维运动图像进行三维重建,完成位姿估计与目标卫星自旋轴的参数估计。
[0086]
步骤1-3、根据步骤1-2确定的待捕获目标的姿态和运动参数后,抵近待捕获目标。通常需要在目标的多方位多角度位置进行对比,以免由于观测角度影响抓捕操作。
[0087]
步骤2、结合图3至图4,根据待捕获目标的位置,完成异构多柔性臂空间机器人的多超冗余连续型机械臂的路径规划,具体为:
[0088]
步骤2-1、分析连续型机械臂的关节空间、驱动空间和工作空间之间的关系,利用分段常曲率法构建超冗余连续型机械臂的运动学模型;
[0089]
步骤2-2、利用dh参数法构建柔性关节机械臂的运动学模型;
[0090]
步骤2-3、对抓捕阶段的多超冗余连续型机械臂进行包络空间分析,兼顾多项约束、多项目标安全捕获指标,构建多超冗余连续型机械臂的多目标优化模型,完成异构多柔性臂空间机器人的多超冗余连续型机械臂的路径规划,具体为:
[0091]
使用定性与定量相结合的方法,分层分级地对抓捕阶段的多超冗余连续型机械臂进行包络路径与柔性体振动空间分析,优化多超冗余连续型机械臂末端运动路径使其对非合作目标形成形封闭,并兼顾连续型机械臂形态与目标卫星的相似度、连续型机械臂末端稳态指向精度与稳定度、燃料消耗以及捕获过程中连续型机械臂与失效卫星接触的安全性等多重性能指标,在关节角、速度、加速度与测量装置角速率范围以及操作空间障碍物等多重限制条件下,建立多约束条件下超冗余连续型空间机械臂的多目标优化模型;
[0092]
其中,则多目标优化问题数学模型描述为:
[0093]
min{y=f(x)=(f1(x),f2(x),...,fm(x))}
[0094]
s.t. gi(x)≤0,i=1,2,...,p,
[0095]hj
(x)=0,j=1,2,...q,
[0096]
x∈x∈rn,y∈y∈rm[0097]
其中,x为决策向量,y为目标向量,x为决策向量x形成的决策空间,y为目标向量y形成的目标空间,g(x),h(x)为x需满足的等式与不等式约束条件。
[0098]
应用基于r支配的高维多目标分层算法,寻找基于决策者期望的pareto最优解集,求解高维多目标优化问题。分层算法的底层采用全局搜索能力较强的快速非支配遗传算法进行精英个体的筛选,上层则采用局部搜索能力较强的骨干多目标粒子群算法进行更加精确的搜索,以提高优化算法的收敛速度。
[0099]
空间机器人对准目标自旋轴,3条超冗余连续臂形态固定为圆弧型,保证各连续型臂与目标卫星之间距离大于l。
[0100]
步骤3、结合图5,到达预定目标位置,异构多柔性臂空间机器人对待捕获目标进行捕获,采用“松包络”和“紧包络”的多模包络策略与主被动相结合的消旋策略,具体为:
[0101]
缓慢减小连续型机械臂与目标卫星之间距离d,直至柔性减速刷与目标卫星进行接触。并使用视觉感知模块进行目标卫星自旋转速测量,若自旋速度大于v1,重复此步骤。当出现失稳连续型机械臂抖震过大时,稍扩大距离d并停止运动,静止至自旋速度不再改变时,继续减小距离d。
[0102]
缓慢控制连续型机械臂与目标卫星产生硬接触,通过多连续型机械臂内力觉感知模块,测量当前连续型机械臂与目标卫星之间的作用力f,控制f靠近期望力fd,获得最佳的消旋效果。使用视觉感知模块进行目标卫星自旋转速测量,若自旋速度大于v2,重复此步骤。
[0103]
步骤4、对捕获的目标进行固连,完成异构多柔性臂空间机器人对在轨目标的安全捕获,具体为:
[0104]
控制柔性关节机械臂末端夹爪与失效卫星进行接触,实时检测柔性机械臂末端缓冲装置形变量,控制固连过程中形变量始终小于δω,直至完成固连任务。
[0105]
本发明的技术方案利用连续型机械臂质量轻、柔顺灵活的特点以及柔性关节机械臂高稳定性与负载能力,通过多柔性空间机器人系统力/位置混合控制方法和多模包络策略,实现对失效卫星的消旋与捕获,在实现对非合作目标捕获的同时,保证目标的安全完好,提供了一种安全且泛用性较强的失效卫星抓捕方法。
[0106]
以上实施例显示和描述了本发明的基本原理、主要特征。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1