一种模拟鸟类飞行姿态的扑翼装置的制作方法
1.本发明涉及仿生姿态技术领域,具体为一种模拟鸟类飞行姿态的扑翼装置。
背景技术:
2.鸟类的翅膀一般分为內翼和外翼两个部分,并通过翅膀的主动变形在实际飞行过程中实现升力与推力大小的增大,在仿生原理中,扑翼机是通过扑动机翼产生升力和推力,从而实现起飞、降落、加速、减速、急跃升、急转弯、悬停、倒飞、俯冲和举升等飞行动作。
3.现有技术中,如中国专利号为:cn204279946u的“仿生机械鸟飞行装置传动机构”,包括包括躯干部分和铰接于位于躯干部分两侧且对称设置的扑翼部分,扑翼部分包括相互平行的上支撑杆和下支撑杆,沿上支撑杆的轴向设置有多个主翼框架,而下支撑杆则穿接在位于主翼框架上的过孔中,在每个扑翼部分外都包裹有扑翼外壳;它创造性的采用仿生原理,采用五杆机构与曲柄摇杆机构相结合,通过机械传动模拟出鸟在飞行过程中的扑翼动作,采用该种传动装置的仿生机械鸟飞行器能够获得较大的升力,适合于复杂天气或地域的飞行任务,它最大的特点是完全模拟自然界中鸟类飞行的姿态,具有较强的隐蔽性和趣味性。
4.但现有技术中,目前科技馆行同类产品采用大型吊装平台加鸟身装置,通过钢丝绳牵引翅膀的方式制作,该设计存在以下缺陷:
①
吊装装置过于笨重,成本高;
②
鸟飞行姿态死板,仅鸟头部与翅膀轻幅度运动钢;
③
丝绳牵引翅膀形成的角度偏移严重影响钢丝绳的使用寿命;
④
安装环境受限,仅适用吊装方式。
技术实现要素:
5.本发明的目的在于提供一种模拟鸟类飞行姿态的扑翼装置,以解决上述背景技术提出的目前科技馆行同类产品采用大型吊装平台加鸟身装置,通过钢丝绳牵引翅膀的方式制作,该设计存在以下缺陷:
①
吊装装置过于笨重,成本高;
②
鸟飞行姿态死板,仅鸟头部与翅膀轻幅度运动钢;
③
丝绳牵引翅膀形成的角度偏移严重影响钢丝绳的使用寿命;
④
安装环境受限,仅适用吊装方式的问题。
6.为实现上述目的,本发明提供如下技术方案:一种模拟鸟类飞行姿态的扑翼装置,包括整体安装固定机构,所述整体安装固定机构的下侧固定连接有拍翼机构,所述拍翼机构包括动力传动机构,所述动力传动机构包括凸轮连杆传动组件,所述凸轮连杆传动组件包括凸轮,所述凸轮的中部固定安装有传动主轴,所述凸轮的下侧滚动连接有小轴承,所述小轴承的侧面固定连接有圆环板,所述圆环板的一侧固定连接有卡块,所述卡块的内侧滑动连接有内固定条,所述传动主轴的外表面左部固定安装有轴承,所述轴承的外侧固定安装有固定环,所述传动主轴的外表面右部固定安装有凸轮部件,所述圆环板的另一侧活动连接有连杆,所述连杆的上端转动连接有v字连杆,所述v字连杆的另一端转动连接有固定限位栓,所述v字连杆的中部转动连接有摆杆轴件。
7.优选的,所述固定环的左侧固定连接有动力仓,所述动力仓内腔侧面与内固定条
的一侧固定连接,所述动力仓的右侧固定连接有侧块,所述侧块的中部与摆杆轴件的外表面转动连接,所述动力仓的前侧上部固定连接有单孔耳块,所述动力仓的前侧下部固定连接有双孔耳块。
8.优选的,所述动力传动机构的外侧固定连接有传动架组件,所述传动架组件包括滚球连座,所述滚球连座的下侧固定连接有安装基板,所述安装基板的上侧固定连接有支撑柱,所述滚球连座的上侧与凸轮部件的外表面固定连接。
9.优选的,所述固定限位栓中部转动连接有长传动杆,所述v字连杆的外侧固定连接有内部翅膀,所述内部翅膀的右端转动连接有转轴,所述转轴的外表面转动连接有外部翅膀,所述外部翅膀的上侧固定连接有半角环,所述长传动杆的另一端与半角环的一端固定连接。
10.优选的,所述动力仓的后侧固定连接有固定框板,所述固定框板的后侧固定安装有驱动电机,所述驱动电机的左端与传动主轴的右端固定安装。
11.优选的,所述拍翼机构的左侧固定连接有头部联动机构,所述头部联动机构包括头型,所述头型的中部固定连接有联动组件,所述联动组件包括y字连杆,所述y字连杆的上端活动连接有长联动杆,所述长联动杆的右端转动连接有固定轴架。
12.优选的,所述固定轴架的外侧与支撑柱的内侧固定连接,所述y字连杆的下端转动连接有连接板,所述连接板的外侧搭接有头部连杆。
13.优选的,所述头部连杆的中部转动连接有铰链装置a,所述铰链装置a的外表面与连接板的上端内部转动连接,所述连接板的下端内部转动连接有铰链装置b,所述铰链装置b的外表面卡接有支撑块。
14.优选的,所述拍翼机构的右侧固定连接有尾部起伏机构,所述尾部起伏机构包括尾翼,所述尾翼的下侧固定连接有支撑架,所述支撑架的左侧与固定框板的右侧固定连接。
15.优选的,所述整体安装固定机构包括固定板,所述固定板的外侧固定连接有连接架,所述连接架的下侧固定连接有连接柱。
16.与现有技术相比,本发明的有益效果是:
17.1、本发明中,通过设置两组独立凸轮-连杆组合机构机,分别控制内部翅膀及外部翅膀摆动,两组装置的驱动凸轮错位设计在同一主轴上。通过设计调整两组凸轮相对角度、凸轮转动中心、连杆长度、摆杆长度等参数,确保内外翅膀飞行姿态协调自然。
18.2、本发明中,通过设置头部联动机构使整套装置更加协调,首先通过铰链装置与凸轮部件联动机械鸟飞翔过程中身体起伏的姿态,连杆同步控制头部连杆机构使鸟头运动;其次该机构安装基板可同时满足吊装或落地安装需求,适应更多场合。
19.3、本发明中,通过设置尾部起伏装置作为装置的动力源,通过螺栓与排翼机构连接为一体,驱动电机与传动主轴采用联轴器连接,为电机提供稳定的工作空间。
附图说明
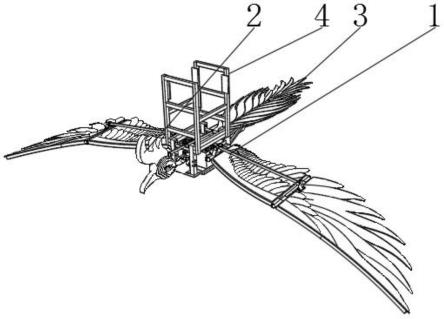
20.图1为本发明一种模拟鸟类飞行姿态的扑翼装置的结构示意图;
21.图2为本发明一种模拟鸟类飞行姿态的扑翼装置尾部起伏机构的结构示意图;
22.图3为本发明一种模拟鸟类飞行姿态的扑翼装置整体安装固定机构的结构示意图;
23.图4为本发明一种模拟鸟类飞行姿态的扑翼装置内外翅膀的结构示意图;
24.图5为本发明一种模拟鸟类飞行姿态的扑翼装置主体的结构示意图;
25.图6为本发明一种模拟鸟类飞行姿态的扑翼装置联动组件的结构示意图;
26.图7为本发明一种模拟鸟类飞行姿态的扑翼装置动力传动机构的结构示意图;
27.图8为本发明一种模拟鸟类飞行姿态的扑翼装置凸轮连杆传动组件的结构示意图。
28.图中:1、拍翼机构;11、内部翅膀;12、长传动杆;13、转轴;14、半角环;15、外部翅膀;16、传动架组件;161、支撑柱;162、安装基板;163、滚球连座;164、固定框板;165、驱动电机;17、动力传动机构;171、双孔耳块;172、单孔耳块;173、凸轮连杆传动组件;1731、固定限位栓;1732、v字连杆;1733、摆杆轴件;1734、连杆;1735、圆环板;1736、固定环;1737、轴承;1738、凸轮部件;1739、传动主轴;17310、凸轮;17311、小轴承;17312、卡块;17313、内固定条;174、动力仓;175、侧块;
29.2、头部联动机构;21、头型;22、联动组件;221、头部连杆;222、连接板;223、铰链装置a;224、y字连杆;225、铰链装置b;226、支撑块;227、长联动杆;228、固定轴架;
30.3、尾部起伏机构;31、尾翼;32、支撑架;
31.4、整体安装固定机构;41、固定板;42、连接架;43、连接柱。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施条例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.参照图1-8所示:一种模拟鸟类飞行姿态的扑翼装置,包括整体安装固定机构4,整体安装固定机构4的下侧固定连接有拍翼机构1,拍翼机构1包括动力传动机构17,动力传动机构17包括凸轮连杆传动组件173,凸轮连杆传动组件173包括凸轮17310,凸轮17310的中部固定安装有传动主轴1739,凸轮17310的下侧滚动连接有小轴承17311,小轴承17311的侧面固定连接有圆环板1735,圆环板1735的一侧固定连接有卡块17312,卡块17312的内侧滑动连接有内固定条17313,传动主轴1739的外表面左部固定安装有轴承1737,轴承1737的外侧固定安装有固定环1736,传动主轴1739的外表面右部固定安装有凸轮部件1738,圆环板1735的另一侧活动连接有连杆1734,连杆1734的上端转动连接有v字连杆1732,v字连杆1732的另一端转动连接有固定限位栓1731,v字连杆1732的中部转动连接有摆杆轴件1733;传动主轴1739获得动力带动两个凸轮17310转动,凸轮17310凸起部分向下推动小轴承17311,使得圆环板1735带动卡块17312在内固定条17313的表面向下滑动,同时圆环板1735拖动连杆1734的向下,使v字连杆1732的一端向下作扇形运动,导致另一端做扇形运动向上,两个凸轮17310共轴,实现同频运行。
34.根据图7所示,固定环1736的左侧固定连接有动力仓174,动力仓174内腔侧面与内固定条17313的一侧固定连接,动力仓174的右侧固定连接有侧块175,侧块175的中部与摆杆轴件1733的外表面转动连接,动力仓174的前侧上部固定连接有单孔耳块172,动力仓174的前侧下部固定连接有双孔耳块171;设置两组独立的凸轮连杆传动组件173,分别实现对
内部翅膀及外部翅膀拍翼姿态的精准控制。
35.根据图6所示,动力传动机构17的外侧固定连接有传动架组件16,传动架组件16包括滚球连座163,滚球连座163的下侧固定连接有安装基板162,安装基板162的上侧固定连接有支撑柱161,滚球连座163的上侧与凸轮部件1738的外表面固定连接;在凸轮部件1738转动的过程中,会带动滚球连座163滚动,同时安装基板162会随着凸轮部件1738的转动出现上下起伏,提供联动的动力。
36.根据图4所示,固定限位栓1731中部转动连接有长传动杆12,v字连杆1732的外侧固定连接有内部翅膀11,内部翅膀11的右端转动连接有转轴13,转轴13的外表面转动连接有外部翅膀15,外部翅膀15的上侧固定连接有半角环14,长传动杆12的另一端与半角环14的一端固定连接;一组凸轮17310带动单孔耳块172做扇形运动,拖动长传动杆12,由此通过半角环14拉动外部翅膀15,另一组通过摆杆轴件1733连接内部翅膀11,控制内部翅膀11做拍翼动作。
37.根据图6所示,动力仓174的后侧固定连接有固定框板164,固定框板164的后侧固定安装有驱动电机165,驱动电机165的左端与传动主轴1739的右端固定安装;通过螺栓固定,驱动电机165与传动主轴1739采用联轴器连接,为驱动电机165提供稳定的工作空间。
38.根据图6所示,拍翼机构1的左侧固定连接有头部联动机构2,头部联动机构2包括头型21,头型21的中部固定连接有联动组件22,联动组件22包括y字连杆224,y字连杆224的上端活动连接有长联动杆227,长联动杆227的右端转动连接有固定轴架228;通过长联动杆227与传动架组件16活动连接,y字连杆224同步控制头部连杆机构使鸟头运动。
39.根据图6所示,固定轴架228的外侧与支撑柱161的内侧固定连接,y字连杆224的下端转动连接有连接板222,连接板222的外侧搭接有头部连杆221;用两个铰链装置a223和两个铰链装置b225将多个头部连杆221和连接板222连接成菱形框架,在限定的范围空间中控制头部来回运动。
40.根据图6所示,头部连杆221的中部转动连接有铰链装置a223,铰链装置a223的外表面与连接板222的上端内部转动连接,连接板222的下端内部转动连接有铰链装置b225,铰链装置b225的外表面卡接有支撑块226;支撑块226作为连接的基础,两端均连接铰链结构,与头部连杆221、连接板222和铰链装置a223组成的菱形框架配合,完成头部联动。
41.根据图2所示,拍翼机构1的右侧固定连接有尾部起伏机构3,尾部起伏机构3包括尾翼31,尾翼31的下侧固定连接有支撑架32,支撑架32的左侧与固定框板164的右侧固定连接;支撑架32支撑起尾翼31,在受到拍翼机构1联动的作用下,完成尾部起伏。
42.根据图3所示,整体安装固定机构4包括固定板41,固定板41的外侧固定连接有连接架42,连接架42的下侧固定连接有连接柱43;通过连接柱43将装置和连接架42进行连接,固定板41固定在载体上,随着载体的移动带动装置移动,完成安装。
43.本装置的使用方法及工作原理:连接柱43将装置和连接架42进行连接,固定板41固定在载体上,随着载体的移动带动装置移动,完成安装,启动驱动电机165,驱动电机165与传动主轴1739采用联轴器连接,传动主轴1739获得动力带动两个凸轮17310转动,凸轮17310凸起部分向下推动小轴承17311,使得圆环板1735带动卡块17312在内固定条17313的表面向下滑动,同时圆环板1735拖动连杆1734的向下,使v字连杆1732的一端向下作扇形运动,导致另一端做扇形运动向上,一组凸轮17310带动单孔耳块172做扇形运动,拖动长传动
杆12,由此通过半角环14拉动外部翅膀15,另一组通过摆杆轴件1733连接内部翅膀11,控制内部翅膀11做拍翼动作,两组独立的凸轮连杆传动组件173,分别实现对内部翅膀及外部翅膀拍翼姿态的精准控制,在凸轮部件1738转动的过程中,会带动滚球连座163滚动,同时安装基板162会随着凸轮部件1738的转动出现上下起伏,支撑块226作为连接的基础,两端均连接铰链结构,与头部连杆221、连接板222和铰链装置a223组成的菱形框架配合,完成头部的上下起伏,支撑架32支撑起尾翼31,在受到拍翼机构1联动的作用下,完成尾部起伏,由此形成仿生鸟类扑翼。
44.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1