1.本发明涉及卫星姿态慢旋停旋保稳定测控的时机确定技术领域,具体地,涉及一种卫星慢旋姿态下停旋保测控时机预报方法及系统。
背景技术:2.卫星在轨飞行过程中采用对日慢旋是一种常见的姿态模式,一般在星箭分离、太阳帆板展开后快速进入该模式,以便优先保证卫星能源安全,并且确保旋转状态下地面必定可以与卫星建链。然而,在测控天线偏置安装卫星绕旋转轴进行慢旋时,卫星对地测控将表现为断续状态,不利于地面对卫星进行连续监视和上令操作。因此,在卫星已进入对日慢旋,并在断续测控条件下确认状态良好后,须上令停止卫星慢旋,使测控天线与地面站保持在最好的几何条件,保证后续飞行弧段稳定测控。针对停旋时机的选择,目前该方法的提出尚属空白。
3.公开号为cn110667892b的发明专利,公开了一种基于地磁测量的卫星消旋控制方法,包括以下步骤:根据卫星所在地磁场的磁感应强度在地心坐标系的坐标以及转换矩阵,建立卫星姿态矩阵;根据所述卫星姿态矩阵建立磁感应强度变化量相对于卫星姿态角速度的计算矩阵;测量所述磁感应强度的变化量,并根据该变化量和所述计算矩阵计算卫星的三轴角速度;根据所述三轴角速度对卫星进行消旋控制。该专利中描述的是以地球磁场测量数据为测量量的卫星消旋控制方法,与本次申报专利中基于卫星轨道和姿态预报测控弧段长度从而选择停旋时机的面向问题和采用方法不同,面向的应用方向也不一致。
4.公开号为cn103072701b的发明专利,公开了一种欠驱动的卫星消旋控制方法,步骤为:(1)利用姿态敏感器确定欠驱动卫星的初始自旋轴方位,并根据目标自旋轴方位确定消旋控制的方向和大小;(2)确定各喷气控制发动机所产生的喷气控制力矩和消旋控制方向的几何关系,并选取喷气控制力矩在消旋控制方向上分量最大的喷气控制发动机作为消旋控制发动机;(3)在消旋初期采用“整数倍个自旋周期全喷气”方式,在消旋末期则采用“对称点喷”方式,使用消旋控制发动机进行消旋控制,一次消旋完成后,应使星体自然阻尼一段时间,之后再进行下次的消旋控制,直至卫星的自旋轴到达目标自旋轴。该专利描述的是以星敏感器为姿态基准的控制策略,与本次申报专利中基于卫星轨道和姿态预报测控弧段长度从而选择停旋时机的面向问题和采用方法不同,面向的应用方向也不一致。
5.现有文献《欠驱动三轴稳定卫星的消旋和进动控制技术》(空间控制技术与应用,第40卷第3期,2014年6月)中,该文章主要针对三轴稳定卫星从高速自旋异常状态恢复到正常姿态的欠驱动问题,提出一种欠驱动的消旋和进动控制方法,研究重点集中在消旋控制策略上,与本次申报专利中基于卫星轨道和姿态预报测控弧段长度从而选择停旋时机的面向问题和采用方法不同,面向的应用方向也不一致。
6.目前对卫星消旋的研究多集中于消旋控制策略方面,而对于本专利中描述的面向长时间测控弧段需求的消旋时机预报方法及针对性问题的研究,尚属于空白。
技术实现要素:7.针对现有技术中的缺陷,本发明提供一种卫星慢旋姿态下停旋保测控时机预报方法及系统。
8.根据本发明提供的一种卫星慢旋姿态下停旋保测控时机预报方法及系统,所述方案如下:
9.第一方面,提供了一种卫星慢旋姿态下停旋保测控时机预报方法,所述方法包括:
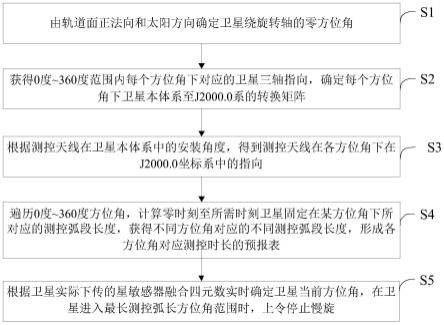
10.步骤s1:由轨道面正法向和太阳方向确定卫星绕旋转轴的零方位角;
11.步骤s2:获得0度~360度范围内每个方位角下对应的卫星三轴指向,确定每个方位角下卫星本体系至j2000.0系的转换矩阵;
12.步骤s3:根据测控天线在卫星本体系中的安装角度,得到测控天线在各方位角下在j2000.0坐标系中的指向;
13.步骤s4:遍历0度~360度方位角,计算零时刻至所需时刻卫星固定在某方位角下所对应的测控弧段长度,获得不同方位角下对应的不同测控弧段长度,形成各方位角对应测控时长的预报表;
14.步骤s5:根据卫星实际下传的星敏感器融合四元数实时确定卫星当前方位角,在卫星进入最长测控弧长方位角范围时,上令停止慢旋。
15.优选的,所述步骤s1包括:
16.由星箭分离后的外测轨道参数确定卫星轨道面正法向单位矢量,由当前时间确定当前太阳方向单位矢量,由轨道面正法向和太阳方向确定卫星绕旋转轴的零方位角,其中,+z为旋转轴,-z对太阳。
17.优选的,所述步骤s2包括:
18.将停旋时机选择转化为绕+z轴旋转的方位角选择,以零方位角为基准,获得0度~360度方位角范围内每个方位角下对应的卫星三轴指向,进而确定每个方位角下卫星本体系至j2000.0系的转换矩阵。
19.优选的,所述步骤s3包括:
20.根据测控天线在卫星本体系中的安装角度,获得其中心指向在本体系中的方向矢量,并根据本体系到j2000.0坐标系的转换矩阵,得到测控天线在各方位角下在j2000.0坐标系中的指向。
21.优选的,所述步骤s4包括:
22.以星箭分离为零时刻,遍历0度~360度方位角,计算零时刻至t时刻卫星固定在某方位角下所对应的测控弧段长度,获得不同方位角对应的不同测控弧段长度,形成方位角和测控时长的预报表。
23.优选的,所述步骤s5包括:
24.在轨根据卫星进入测量弧段后实际下传的星敏感器融合四元数实时确定卫星当前方位角,在卫星进入最长测控弧长方位角范围时,上令停止慢旋,卫星后续将获得最长时间稳定测控弧段。
25.第二方面,提供了一种卫星慢旋姿态下停旋保测控时机预报系统,所述系统包括:
26.模块m1:由轨道面正法向和太阳方向确定卫星绕旋转轴的零方位角;
27.模块m2:获得0度~360度范围内每个方位角下对应的卫星三轴指向,确定每个方
位角下卫星本体系至j2000.0系的转换矩阵;
28.模块m3:根据测控天线在卫星本体系中的安装角度,得到测控天线在各方位角下在j2000.0坐标系中的指向;
29.模块m4:遍历0度~360度方位角,计算零时刻至所需时刻卫星固定在某方位角下所对应的测控弧段长度,获得不同方位角下对应的不同测控弧段长度,形成各方位角对应测控时长的预报表;
30.模块m5:根据卫星实际下传的星敏感器融合四元数实时确定卫星当前方位角,在卫星进入最长测控弧长方位角范围时,上令停止慢旋。
31.优选的,所述模块m1包括:
32.由星箭分离后的外测轨道参数确定卫星轨道面正法向单位矢量,由当前时间确定当前太阳方向单位矢量,由轨道面正法向和太阳方向确定卫星绕旋转轴的零方位角,其中,+z为旋转轴,-z对太阳。
33.优选的,所述模块m2包括:
34.将停旋时机选择转化为绕+z轴旋转的方位角选择,以零方位角为基准,获得0度~360度方位角范围内每个方位角下对应的卫星三轴指向,进而确定每个方位角下卫星本体系至j2000.0系的转换矩阵。
35.优选的,所述模块m3包括:
36.根据测控天线在卫星本体系中的安装角度,获得其中心指向在本体系中的方向矢量,并根据本体系到j2000.0坐标系的转换矩阵,得到测控天线在各方位角下在j2000.0坐标系中的指向。
37.与现有技术相比,本发明具有如下的有益效果:
38.1、本发明填补了面向实际卫星工程实际的停旋保测控时机预报方法的空白;
39.2、通过该方法可避免卫星停旋于天线干涉区造成卫星上下行链路中断,可有效保证卫星在轨安全;
40.3、给出了对日巡航慢旋姿态下停止慢旋保证测控条件的全套计算流程,可为卫星在轨飞控实际操作提供指导。
附图说明
41.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
42.图1本发明整体方案的流程图;
43.图2为慢旋零方位角确定原理工况1;
44.图3为慢旋零方位角确定原理工况2;
45.图4为不同方位角下卫星本体xyz三轴矢量计算原理;
46.图5为卫星测控天线在本体系中方向矢量计算原理;
47.图6为各方位角下对应测控时长计算流程。
具体实施方式
48.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术
人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
49.本发明实施例提供了一种卫星慢旋姿态下停旋保测控时机预报方法,参照图1所示,该方法具体包括:
50.步骤s1:由轨道面正法向和太阳方向确定卫星绕旋转轴的零方位角;
51.具体地,由星箭分离后的外测轨道参数确定卫星轨道面正法向单位矢量,由当前时间确定当前太阳方向单位矢量,由轨道面正法向和太阳方向确定卫星绕旋转轴的零方位角,本实施例中以+z为旋转轴,-z对太阳进行描述。
52.(1)、卫星-地心单位矢量v
sat2earth
;
[0053][0054]
其中,r表示卫星的位置矢量;
[0055]
(2)、卫星轨道面正法向单位矢量h;
[0056][0057]
其中,v表示卫星的速度矢量;
[0058]
(3)、由utcg日期计算儒略日jd;
[0059]
utcg日期[y m d h min s],[年月日时分秒];
[0060]
k1=fix((m-14)/12)
[0061]
s1=floor(1461
×
(y+4800+k1)/4)
[0062]
s2=floor(367
×
(m-2-k1
×
12)/12)
[0063]
cons1=floor((y+4900+k1)/100)
[0064]
s3=floor(3
×
cons1/4)
[0065]
cons=d-32075-0.5+h/24+min/1440+s/86400
[0066]
jd=cons+s1+s2-s3;
[0067]
fix(n):取小于n的整数(向0点舍入),如:fix(pi)=3;fix(3.5)=3;fix(-3.5)=-3。
[0068]
floor(n):向负方向取整舍入,如:floor(pi)=3;floor(3.5)=3;floor(-3.2)=-4。
[0069]
(4)、由儒略日计算j2000.0系下太阳方向单位矢量v
sun_j2000.0
;
[0070]
twopi=2π
[0071]
t=(jd-2451545.0)/36525
[0072]
g=rem(0.993133+99.997361
×
t,1)
[0073]
dlam=6893*sin(twopi
×
g)+72
×
sin(twopi*2
×
g)
[0074]
lam=twopi
×
rem(0.7859453+g+(6191.2
×
t+dlam)/1296000,1)
[0075]
obofe=0.408982
–
0.0002269
×
t
[0076]
slam=sin(lam)
[0077]
u=[cos(lam);cos(obofe)
×
slam;sin(obofe)
×
slam]
[0078]vsun_j2000.0
=u
[0079]
rem(x,y):求x/y的余数,当x和y符号正负不一致时,得到的余数符号与x一致。如:rem(3,2)=1;rem(-3,-2)=-1;rem(-3,2)=-1;rem(3,-2)=1;
[0080]
(5)、j2000.0系下,卫星本体+z轴单位方向矢量vector_z0;
[0081]
vector_z0=-v
sun_j2000.0
[0082]
(6)、j2000.0系下,卫星本体零方位向时本体+x轴指向计算;
[0083]
定义:卫星-z轴对日慢旋,卫星+x向在轨道平面内时为0
°
方位角,且0
°
方位角时+x向朝向地球方位,该定义为惯性参考系,在星箭分离后具备唯一性。根据太阳与轨道面的关系,存在2种工况,具体参照图2和图3所示。
[0084]
工况1:在h与v
sun_j2000.0
位于轨道面不同侧时,有:
[0085][0086]
其中,vector_x0表示0
°
方位角定义下确定出的x方向矢量;
[0087]
工况2:在h与v
sun_j2000.0
位于轨道面同侧时,有:
[0088][0089]
(7)、j2000.0系下,卫星本体零方位向时本体+y轴指向计算
[0090][0091]
通过步骤(1)~(7),获得了零方位角基准下的卫星本体x、y、z三轴在惯性空间中的指向。
[0092]
步骤s2:获得0度~360度范围内每个方位角下对应的卫星三轴指向,确定每个方位角下卫星本体系至j2000.0系的转换矩阵;
[0093]
具体地,将停旋时机选择转化为绕+z轴旋转的方位角选择,以零方位角为基准,可获得0度~360度方位角范围内每个方位角下对应的卫星三轴指向,进而确定每个方位角下卫星本体系至j2000.0系的转换矩阵。
[0094]
方位角定义:方位角方位取0
°
~360
°
(0~2π),按右手定则确定,如图4所示。
[0095]
1、j2000.0系下,卫星本体巡航对日慢旋时,各不同方位角θ对应的卫星本体+x、+y轴单位方向矢量计算:
[0096]
vector_x
′
=vector_x0·
cosθ+vector_y0·
sinθ(角度为弧度)
[0097]
vector_y
′
=-vector_x0·
sinθ+vector_y0·
cosθ(角度为弧度)
[0098]
vector_z
′
=vector_z0[0099]
其中,vector_y
′
表示不同方位角下对应的本体y轴方向矢量;
[0100]
2、卫星在对日巡航慢旋下各方位角对应的本体系到j2000.0系下的转换矩阵matrix_sunrolltoj2000.0计算:
[0101][0102]
步骤s3:根据测控天线在卫星本体系中的安装角度,得到测控天线在各方位角下在j2000.0坐标系中的指向。
[0103]
具体地,根据测控天线在卫星本体系中的安装角度,获得其中心指向在本体系中的方向矢量,并根据本体系到j2000.0坐标系的转换矩阵,得到测控天线在各方位角下在j2000.0坐标系中的指向;
[0104]
a、对地s天线中心指向在卫星本体坐标系中的单位矢量r
s_body
,参照图5所示;
[0105][0106]
b、各方位角下,对地s天线中心指向在j2000.0坐标系下的单位矢量r
s_j2000.0
[0107]rs_j2000.0
=matrix_sunrolltoj2000.0
·rs_body
[0108]
步骤s4:遍历0度~360度方位角,计算零时刻至所需时刻卫星固定在某方位角下所对应的测控弧段长度,获得不同方位角下对应的不同测控弧段长度,形成各方位角对应测控时长的预报表;
[0109]
具体地,以星箭分离为零时刻,遍历0度~360度方位角,计算零时刻至t时刻(按需确定,如10小时或12小时)卫星固定在某方位角下所对应的测控弧段长度,获得不同方位角对应的不同测控弧段长度,形成方位角和测控时长的预报表。
[0110]
具体计算流程见图6所示,流程图中涉及的计算方法如下:
[0111]
a、地面站在j2000.0坐标系下的位置计算函数facility_j2000;
[0112]
说明:为简化过程,本部分计算不考虑岁差、章动、极移,仅考虑自转矩阵,即ep、nr、pr均取为单位矩阵,简化部分通过对测控天线波束角留若干度余量进行包络
[0113]
lon=lla(1),地面站经度,弧度
[0114]
lat=lla(2),地面站纬度,弧度
[0115]
alt=lla(3),地面站高度
[0116]
re=6378.137
[0117]
f=1/298.257223563
[0118]
a=re
[0119]
b=a
×
(1-f)
[0120]
e=((a
2-b2)/a2)
0.5
[0121]
n=a/(1
–
e2×
(sin(lat))2)
0.5
[0122]
x=(n+alt)
×
cos(lat)
×
cos(lon)
[0123]
y=(n+alt)
×
cos(lat)
×
sin(lon)
[0124]
z=(n
×
(1-e2)+alt)
×
sin(lat)
[0125]
p_fixed=[x;y;z]
[0126]
t=(jd-2451545.0)/36525.0
[0127]
sg1=(18.697374558+879000.051336907
×
t+(0.093104
×
t2)/3600.0)
×
15.0
×
pi/180
[0128]
sg=sg1-7.430734356575093
×
10-5
[0129][0130]
b、j2000.0系下,卫星指向地面站的单位方向矢量v
sat2fa
;
[0131][0132]
c、卫星对地s天线中心指向与星站矢量的夹角η;
[0133][0134]
若η小于测控天线波束宽度,判定为有测控;
[0135]
若η大于测控天线波束宽度,判定为无测控。
[0136]
步骤s5:根据卫星实际下传的星敏感器融合四元数实时确定卫星当前方位角,在卫星进入最长测控弧长方位角范围时,上令停止慢旋。
[0137]
具体地,在轨根据卫星进入测量弧段后实际下传的星敏感器融合四元数实时确定卫星当前方位角,在卫星进入最长测控弧长方位角范围时,上令停止慢旋,卫星后续将获得最长时间稳定测控弧段。
[0138]
飞控过程中,实际方位角θ
fk
的计算通过遥测下传的星敏融合四元数q计算得到:
[0139][0140][0141]
当前的方位角计算:
[0142]
θ
fk
=acos(vector_x0·
vector_x'
fk
)
[0143]
vector_x0表示0
°
方位角定义下确定出的x方向矢量;vector_x'
fk
表示根据星上当前下传的融合四元数信息经过计算获得的实际x轴指向;q0、q1、q2、q3分别表示星上装载的星敏感器下传的融合四元数;
[0144]
实际飞控过程中,根据θ
fk
进行判断,其落于最长测控弧段方位角范围内,上令停止慢旋。
[0145]
本发明实施例提供的一种卫星慢旋姿态下停旋保测控时机预报方法,通过卫星轨
道参数和卫星姿态参数联合计算,为卫星上令停止慢旋的时机确定提供依据。
[0146]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0147]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。