一种控制航天器海上发射的控制系统的制作方法
1.本发明涉及航天器发射控制技术领域,特别是指一种控制航天器海上发射的控制系统。
背景技术:
2.海上发射是航天器(如火箭或导弹等)发射的未来发展方向,相对于陆地发射,海上发射具有机动灵活、覆盖区域广、节约火箭发动机燃料等优点;但是海上的发射船或者海上平台会面临及其复杂的海上环境,在海上风浪作用下,发射船船体本身会产生运动,同时这种运动会影响航天器在发射时的姿态,给航天器姿态控制带来负面影响;因此,需要解决航天器在海上发射时可能存在的复杂海况对发射姿态干扰的问题。
技术实现要素:
3.本发明要解决的技术问题是提供一种控制航天器海上发射的控制系统,解决了航天器在海上发射时复杂海况对发射姿态干扰,该支撑系统可实现调平和减摇,保证了航天器在海上发射的成功率。
4.为解决上述技术问题,本发明的技术方案如下:一种控制航天器海上发射的控制系统,包括:固定于发射船上的至少一组支撑环,所述至少一组支撑环中包括两个支撑环,所述两个支撑环关于航天器对称设置;所述至少一组支撑环中的每一组支撑环均通过一组支腿油缸与发射船固定连接;控制器,与所述每一组支撑环对应的支腿油缸电连接,所述控制器用于获取所述支撑环的倾斜度,根据所述支腿油缸对支撑环进行调平控制。
5.可选的,当所述至少一组支撑环包括两组支撑环时,所述第一组支撑环与所述第二组支撑环关于航天器对称设置;其中,所述第一组支撑环包括:第一支撑环和第三支撑环;所述第二组支撑环包括:第二支撑环和第四支撑环;所述第一支撑环和所述第三支撑环关于所述航天器对称设置,所述第二支撑环和第四支撑环关于所述航天器对称设置。
6.可选的,所述第一支撑环、第二支撑环、第三支撑环和第四支撑环的结构相同,均包括:支撑环体;所述支撑环体具有第一连接部、第二连接部和第三连接部;所述第一连接部、第二连接部和第三连接部在所述支撑环体上均匀分布。
7.可选的,所述支腿油缸包括:第一主支撑油缸和第二主支撑油缸;
所述第一主支撑油缸的第一端垂直于所述支撑环体,并通过所述第一连接部与所述支撑环体固定连接,所述第一主支撑油缸的第二端垂直于所述发射船的固定面,并与所述固定面固定连接;所述第二主支撑油缸的第一端垂直于所述支撑环体,并通过所述第二连接部与所述支撑环体固定连接,所述第二主支撑油缸的第二端垂直于所述发射船的固定面,并与所述固定面固定连接;所述第一支撑环、第二支撑环、第三支撑环和第四支撑环分别对应的第一主支撑油缸依次管路连接;所述第一支撑环、第二支撑环、第三支撑环和第四支撑环分别对应的第一主支撑油缸和第二主支撑油缸均与能源组管路连接。
8.可选的,所述第一主支撑油缸和第二主支撑油缸均包括:第一主支撑油缸体;与所述第一主支撑油缸体电连接的第一位移传感器;第一电磁比例阀,所述第一电磁比例阀的第一端与所述第一主支撑油缸体的第一端管路连接,所述第一电磁比例阀的第二端与所述第一主支撑油缸体的第二端管路连接,所述第一电磁比例阀的第三端与所述能源组的第一端管路连接,所述第一电磁比例阀的第四端与所述能源组的第二端管路连接;所述控制器与所述第一位移传感器电连接;所述控制器用于获取所述支撑环的倾斜度,当所述倾斜度大于预设倾斜度时,根据所述倾斜度确定所述第一电磁比例阀的阀芯开度的控制信号,所述控制信号控制所有所述第一电磁比例阀的阀芯开度后,获得所述第一位移传感器反馈的所述第一主支撑油缸体的第一位移,根据所述第一位移控制所述第一主支撑油缸体对应的支撑环调平,直至所述倾斜度小于或等于预设倾斜度。
9.可选的,所述第一主支撑油缸和第二主支撑油缸均还包括以下至少一个两位两通阀:第一两位两通阀,所述第一两位两通阀设置于所述第一电磁比例阀的第一端与所述第一主支撑油缸体的第一端之间的管路上;第二两位两通阀,所述第二两位两通阀设置于所述第一电磁比例阀的第三端与所述能源组的第一端之间的管路上;第三两位两通阀,所述第三两位两通阀设置于所述第一电磁比例阀的第四端与所述能源组的第二端之间的管路上;第四两位两通阀,所述第四两位两通阀设置于所述第一主支撑油缸体的第二端的管路上;所述控制器与所述第一主支撑油缸和第二主支撑油缸的第一两位两通阀、第二两位两通阀、第三两位两通阀以及第四两位两通阀均电连接;所述控制器用于获取所述支撑环的倾斜度,当所述倾斜度大于预设倾斜度时,按照预设顺序控制所述第一支撑环、第二支撑环、第三支撑环以及第四支撑环对应的所述第一两位两通阀和第四两位两通阀开启。
10.可选的,所述支腿油缸还包括:辅助油缸;所述辅助油缸的第一端与所述支撑环体固定连接,所述辅助油缸的第二端通过所
述第三连接部与所述发射船的固定面球铰连接;所述第一支撑环、第二支撑环、第三支撑环和第四支撑环分别对应的所述辅助油缸均与能源组管路连接。
11.可选的,所述辅助油缸包括:辅助油缸本体;所述辅助油缸本体的第二端与所述第一主支撑油缸体的第二端管路连接;与所述辅助油缸本体电连接的第二位移传感器;泵控能源组;所述泵控能源组的第一端与所述辅助油缸本体的第一端管路连接,所述泵控能源组的第二端与所述辅助油缸本体的第二端管路连接;第二电磁比例阀,所述第二电磁比例阀的第一端与所述辅助油缸本体的第一端管路连接,所述第二电磁比例阀的第二端与所述辅助油缸本体的第二端管路连接,所述第二电磁比例阀的第三端与所述能源组的第一端管路连接,所述第二电磁比例阀的第四端与所述能源组的第二端管路连接;所述控制器与所述第二位移传感器电连接;所述控制器用于获取所述支撑环的摇动程度,当所述摇动程度大于预设值时,根据所述摇动程度控制所述第一主支撑油缸、第二主支撑油缸以及辅助油缸中管路的通断,以使所述第一主支撑油缸和第二主支撑油缸对所述支撑环进行一级减摇处理;并根据一级减摇处理后支撑环的摇动程度,确定泵控能源组的排量信号,通过所述排量信号控制所述泵控能源组进行排量后,获得所述第二位移传感器反馈的所述辅助油缸本体的第二位移,根据所述第二位移控制所述辅助油缸本体对应的支撑环进行二级减摇处理,直至所述摇动程度小于或等于预设值。
12.可选的,所述辅助油缸还包括以下至少一个两位两通阀:第五两位两通阀,所述第五两位两通阀设置于所述第二电磁比例阀的第一端与所述辅助油缸本体的第一端之间的管路上;第六两位两通阀,所述第六两位两通阀设置于所述第二电磁比例阀的第三端与所述能源组的第一端之间的管路上;第七两位两通阀,所述第七两位两通阀设置于所述第二电磁比例阀的第四端与所述能源组的第二端之间的管路上;第八两位两通阀,所述第八两位两通阀设置于所述辅助油缸本体的第二端的管路上;所述控制器与所述辅助油缸本体的第五两位两通阀、第六两位两通阀、第七两位两通阀以及第八两位两通阀均电连接;所述控制器用于获取所述支撑环的摇动程度,当所述摇动程度大于预设值时,控制所述第六两位两通阀、第七两位两通阀、第二两位两通阀以及第三两位两通阀关闭,控制所述第一两位两通阀和所述第五两位两通阀开启。
13.可选的,所述辅助油缸还包括:蓄能器组,所述蓄能器组与所述辅助油缸本体的第二端管路连接。
14.本发明的上述方案至少包括以下有益效果:通过固定于发射船上的至少一组支撑环,所述至少一组支撑环中包括两个支撑环,所述两个支撑环关于航天器对称设置;所述至少一组支撑环中的每一组支撑环均通过一组支腿油缸与发射船固定连接;控制器,与所述每一组支撑环对应的支腿油缸电连接,所
述控制器用于获取所述支撑环的倾斜度,根据所述支腿油缸对支撑环进行调平控制;本发明的方案解决了航天器在海上发射时复杂海况对发射姿态干扰,保证了航天器在海上发射的成功率。
附图说明
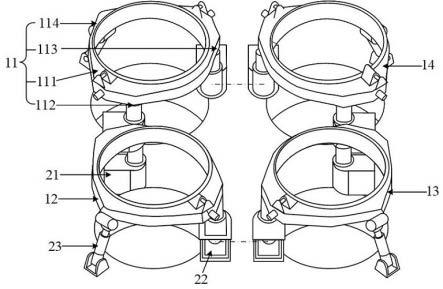
15.图1是本发明实施例提供的控制航天器海上发射的控制系统的示意图;图2是本发明提供的具体的实施例中支腿油缸的结构示意图;图3本发明提供的具体的实施例中辅助油缸与发射船之间的球铰连接处的结构示意图;图4是本发明提供的具体的实施例中第一组支撑环、第二组支撑环、第三组支撑环以及第四组支撑环对应的支撑油缸的连接结构示意图;图5是本发明提供的具体的实施例中控制航天器海上发射的控制系统的结构示意图;图6是本发明提供的具体的实施例中第六支撑环和第八支撑环对应的支腿油缸不平的示意图;图7是本发明提供的具体的实施例中调平的控制原理示意图;图8是本发明提供的具体的实施例中航天器的支撑系统在发射船上摇摆的示意图;图9是本发明提供的具体的实施例中减摇处理时支腿油缸的结构示意图;图10是本发明提供的具体的实施例中减摇的控制原理示意图。
16.附图标记说明:11-第一支撑环;111-支撑环体;112-第一连接部;113-第二连接部;114-第三连接部;12-第二支撑环;13-第三支撑环;14-第四支撑环;21-第一主支撑油缸;211-第一主支撑油缸体;212-第一位移传感器;213-第一电磁比例阀;214-第一两位两通阀;215-第二两位两通阀;216-第三两位两通阀;217-第四两位两通阀;218-第一安全阀;22-第二主支撑油缸;23-辅助油缸;231-辅助油缸本体;232-第二位移传感器;233-泵控能源组;234-第二电磁比例阀;235-第五两位两通阀;236-第六两位两通阀;237-第七两位两通阀;238-第八两位两通阀;239-蓄能器组;2310-第二安全阀;24-能源组;30-球铰连接处;31-球轴承;32-球铰支座;41-火箭;42-火箭支撑环;43-火箭支腿油缸;44-船舶;721-第七主支撑油缸;722-第八主支撑油缸;723-第三辅助油缸;25-第一中间两位两通阀;725-第四中间两位两通阀;81-第五支撑环;82-第六支撑环;83-第七支撑环;84-第八支撑环。
具体实施方式
17.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
18.本发明的实施例提供一种控制航天器海上发射的控制系统,包括:固定于发射船上的至少一组支撑环,所述至少一组支撑环中包括两个支撑环,所
述两个支撑环关于航天器对称设置;所述至少一组支撑环中的每一组支撑环均通过一组支腿油缸与发射船固定连接;控制器,与所述每一组支撑环对应的支腿油缸电连接,所述控制器用于获取所述支撑环的倾斜度,根据所述支腿油缸对支撑环进行调平控制。
19.该实施例中,控制航天器海上发射的控制系统设置在航天器与发射船之间,该控制系统用于支撑在发射船上的航天器,并控制该航天器调平;控制系统包括固定于发射船上的至少一组支撑环和控制器,每一组支撑环均通过一组支腿油缸与发射船固定连接,控制器同时与每一组支撑环对应的支腿油缸电连接,根据支撑环的倾斜度,对支腿油缸进行支撑环的调平控制;解决了航天器在海上发射时复杂海况对发射姿态干扰,保证了航天器在海上发射的成功率。
20.如图1所示,本发明一可选的实施例中,当所述至少一组支撑环包括两组支撑环时,第一组支撑环与第二组支撑环关于航天器对称设置;其中,所述第一组支撑环包括:第一支撑环11和第三支撑环13;所述第二组支撑环包括:第二支撑环12和第四支撑环14;所述第一支撑环11和所述第三支撑环13关于所述航天器对称设置,所述第二支撑环12和第四支撑环14关于所述航天器对称设置。
21.本实施例中,当航天器需要两组支撑环时(如,存在4个助推器时),可将两组支撑环关于航天器对称设置,第一组支撑环包括第一支撑环11和第三支撑环13,第二组支撑环包括第二支撑环12和第四支撑环14,第一支撑环11和第三支撑环13关于航天器对称设置,第二支撑环12和第四支撑环14关于航天器对称设置。
22.本发明一可选的实施例中,所述第一支撑环11、第二支撑环12、第三支撑环13和第四支撑环14的结构相同,均包括:支撑环体111;所述支撑环体111具有第一连接部112、第二连接部113和第三连接部114;所述第一连接部112、第二连接部113和第三连接部114在所述支撑环体111上均匀分布。
23.本实施例中,支撑环的支撑环体111对航天器起到支撑作用,支撑环体111具有第一连接部112、第二连接部113和第三连接部114,需要说明的是,支撑环体111还可以包括多个连接部,用于与油缸固定连接,支撑环体111上设置的连接部的总数可根据实际情况而定,本技术不以此为限制。
24.本发明一可选的实施例中,所述支腿油缸包括:第一主支撑油缸21和第二主支撑油缸22;所述第一主支撑油缸21的第一端垂直于所述支撑环体111,并通过所述第一连接部112与所述支撑环体111固定连接,所述第一主支撑油缸21的第二端垂直于所述发射船的固定面,并与所述固定面固定连接;所述第二主支撑油缸22的第一端垂直于所述支撑环体111,并通过所述第二连接部113与所述支撑环体111固定连接,所述第二主支撑油缸22的第二端垂直于所述发射船的固定面,并与所述固定面固定连接;所述第一支撑环11、第二支撑环12、第三支撑环13和第四支撑环14分别对应的第一主支撑油缸21依次管路连接;所述第一支撑环11、第二支撑环12、第三支撑环13和第四支撑环14分别对应的第
一主支撑油缸21和第二主支撑油缸22均与能源组24管路连接。
25.该实施例中,由于每个支腿油缸对应的支撑环所相邻的支撑环的总数为2,因此,支腿油缸包括第一主支撑油缸21和第二主支撑油缸22,即主支撑油缸的总数也为2,支腿油缸设置于发射船和支撑环之间,支腿油缸的第一主支撑油缸21和第二主支撑油缸22垂直设置于支撑环和发射船的固定面之间,垂直两端的连接处优选通过法兰连接;第一支撑环11、第二支撑环12、第三支撑环13和第四支撑环14中相邻的支撑环的第一主支撑油缸21均通过管路连接;第一支撑环11、第二支撑环12、第三支撑环13和第四支撑环14分别对应的第一主支撑油缸21和第二主支撑油缸22均与能源组24管路连接,通过能源组24向支腿油缸进行供油实现对支腿油缸的液压控制,控制对应的支撑环的水平偏移程度。
26.需要说明的是,控制航天器海上发射的控制系统中,支腿油缸的总数量与支撑环的总数量相同,支腿油缸中的主支撑油缸的总数量取决于与该支腿油缸对应的支撑环所相邻的支撑环的总数量;如,当支撑环的相邻的支撑环的数量为2时,该支撑环对应的支腿油缸中的主支撑油缸的总数也为2;支撑环的数量通常情况下与航天器上设置的助推器的数量相同,可以为2个,也可以为4个,本技术不以此为限制。
27.本发明一可选的实施例中,所述第一主支撑油缸21和第二主支撑油缸22均包括:第一主支撑油缸体211;与所述第一主支撑油缸体211电连接的第一位移传感器212;第一电磁比例阀213,所述第一电磁比例阀213的第一端与所述第一主支撑油缸体211的第一端管路连接,所述第一电磁比例阀213的第二端与所述第一主支撑油缸体211的第二端管路连接,所述第一电磁比例阀213的第三端与所述能源组24的第一端管路连接,所述第一电磁比例阀213的第四端与所述能源组24的第二端管路连接;所述控制器与所述第一位移传感器212电连接;所述控制器用于获取所述支撑环的倾斜度,当所述倾斜度大于预设倾斜度时,根据所述倾斜度确定所述第一电磁比例阀213的阀芯开度的控制信号,所述控制信号控制所有所述第一电磁比例阀213的阀芯开度后,获得所述第一位移传感器212反馈的所述第一主支撑油缸体211的第一位移,根据所述第一位移控制所述第一主支撑油缸体211对应的支撑环调平,直至所述倾斜度小于或等于预设倾斜度。
28.本实施例中,第一主支撑油缸体211为液压缸,用于接收到能源组24的供油时,将液压能转变为机械能,在油液的作用下做直线往复运动(或摆动运动),与第一主支撑油缸体211电连接的第一位移传感器212用于测量第一主支撑油缸体211的运动位移,并以电信号的形式回传给控制器;第一电磁比例阀213用于根据控制器提供的指令信号连续地、按比例地控制第一主支撑油缸体211的动作;通过对第一电磁比例阀213的通断电,第一电磁比例阀213在线圈电流或电磁力的作用下,其内部的弹簧力与电磁力之间存在一定的比例,该比例影响其栓塞的行程和阀门开度,进而可控制第一主支撑油缸体211的动作;其中,第一电磁比例阀213具有压力补偿性能,输出压力和流量可以不受负载变化的影响。
29.其中,第一位移传感器212的安装方式有内置和外置等不同方式,可根据实际情况确定。
30.本发明一可选的实施例中,所述第一主支撑油缸21和第二主支撑油缸22均还包括以下至少一个两位两通阀:
第一两位两通阀214,所述第一两位两通阀214设置于所述第一电磁比例阀213的第一端与所述第一主支撑油缸体211的第一端之间的管路上;第二两位两通阀215,所述第二两位两通阀215设置于所述第一电磁比例阀213的第三端与所述能源组24的第一端之间的管路上;第三两位两通阀216,所述第三两位两通阀216设置于所述第一电磁比例阀213的第四端与所述能源组24的第二端之间的管路上;第四两位两通阀217,所述第四两位两通阀217设置于所述第一主支撑油缸体211的第二端的管路上;所述控制器与所述第一主支撑油缸21和第二主支撑油缸22的第一两位两通阀214、第二两位两通阀215、第三两位两通阀216以及第四两位两通阀217均电连接;所述控制器用于获取所述支撑环的倾斜度,当所述倾斜度大于预设倾斜度时,按照预设顺序控制所述第一支撑环11、第二支撑环12、第三支撑环13以及第四支撑环14对应的所述第一两位两通阀214和第四两位两通阀217开启。
31.本实施例中,两位两通阀可设置于管路上,用于控制油液的通断,第一两位两通阀214用于控制第一电磁比例阀213的第一端与第一主支撑油缸体211的第一端之间的管路上的油液的通断;第二两位两通阀215用于控制第一电磁比例阀213的第三端与能源组24的第一端之间的管路上的油液的通断;第三两位两通阀216用于控制第一电磁比例阀213的第四端与能源组24的第二端之间的管路上的油液的通断;第四两位两通阀217用于控制第一主支撑油缸体211的第二端的管路上的油液的通断。
32.设置在第一主支撑油缸21的第四两位两通阀217的第二端与相邻的第一主支撑油缸21的第一主支撑油缸体211的第二端的管路连通,用于控制第一主支撑油缸21的第一主支撑油缸体211和相邻的第二主支撑油缸22的第一主支撑油缸体211的连通与断开。
33.需要说明的是,控制器对第一主支撑油缸21和第二主支撑油缸22的两位两通阀进行控制可以实现对支撑环的调平,具体的,当控制器获取到的支撑环的倾斜度大于预设倾斜度时,按照预设顺序控制所述第一支撑环11、第二支撑环12、第三支撑环13以及第四支撑环14对应的所述第一两位两通阀214和第四两位两通阀217开启,以使得四个支腿油缸形成均载,即可满足四点调平的功能,实现控制系统的调平。
34.本发明一可选的实施例中,所述第一主支撑油缸21、第二主支撑油缸22均还包括:第一安全阀218,所述第一安全阀218的第一端与所述第一主支撑油缸体211的第一端管路连接,所述第一安全阀218的第二端与所述第一主支撑油缸体211的第二端管路连接。
35.本实施例中,第一安全阀218用于保证控制系统的压力和安全,第一安全阀218的两端分别与第一主支撑油缸体211的第一端和第二端连通,当第一主支撑油缸体211的第一端和第二端之间的压力超过规定安全值时,第一安全阀218打开,使第一主支撑油缸体211的第一端和第二端之间的压力不超过规定安全值,从而保证不因压力过高而发生安全事故。
36.如图2所示,一个具体的实施例中,支腿油缸包括第一主支撑油缸21和第二主支撑油缸22,第一主支撑油缸21和第二主支撑油缸22中均包括:第一主支撑油缸体211;第一位移传感器212;第一电磁比例阀213;第一两位两通阀214;第二两位两通阀215;第三两位两
通阀216;第四两位两通阀217;第一安全阀218。
37.其中,第一主支撑油缸体211的第一端与第一电磁比例阀213的第一端管路连通,该管路上设置有用于控制油液的通断的第一两位两通阀214;第一电磁比例阀213的第三端与能源组24的第一端之间的管路上设置有用于控制油液的通断的第二两位两通阀215;第一电磁比例阀213的第四端与能源组24的第二端之间的管路上设置有用于控制油液的通断的第三两位两通阀216;第一主支撑油缸21的第一主支撑油缸体211的第二端与第二主支撑油缸22的第一主支撑油缸体211的第二端之间的管路上设置有第四两位两通阀217,第一主支撑油缸21的第一主支撑油缸体211的第一端与第二主支撑油缸22的第一主支撑油缸体211的第一端之间的管路上设置有两位两通阀;另外,当需要添加更多的中间支撑油缸时,可以上述方式进行串联,将待添加的主支撑油缸的第一端与边缘的主支撑油缸的第一端通过两位两通阀管路连接,将待添加的主支撑油缸的第二端与边缘的主支撑油缸的第二端通过第四两位两通阀217管路连接,依次类推。
38.本发明一可选的实施例中,所述支腿油缸还包括:辅助油缸23;所述辅助油缸23的第一端与所述支撑环体111固定连接,所述辅助油缸23的第二端通过所述第三连接部114与所述发射船的固定面球铰连接;所述第一支撑环11、第二支撑环12、第三支撑环13和第四支撑环14分别对应的所述辅助油缸23均与能源组24管路连接。
39.本实施例中,支腿油缸还包括辅助油缸23,该辅助油缸23呈一定角度设置于支撑环和发射船之间,且辅助油缸23与发射船的固定面通过球铰连接,第一支撑环11、第二支撑环12、第三支撑环13和第四支撑环14中的辅助油缸23均与能源组24管路连接;当需要对支撑环的摇动程度进行控制时,控制第一主支撑油缸体211对支撑环产生阻尼作用,并结合辅助油缸23减轻海上波浪或船体运动等对航天器的影响,起到减摇和支撑的作用。
40.如图3所示,一个具体的实施例中,辅助油缸23与发射船之间的球铰连接处30包括:球轴承31和球铰支座32,球铰支座32的底部与发射船固定连接,球轴承31可转动设置于球铰支座32内,通过辅助油缸23与发射船之间的球铰连接能够实现辅助油缸23的灵活运动,使得辅助油缸23对来自支撑环的重力均匀承受载荷。
41.本发明一可选的实施例中,所述辅助油缸23包括:辅助油缸本体231;所述辅助油缸本体231的第二端与所述第一主支撑油缸体211的第二端管路连接;与所述辅助油缸本体231电连接的第二位移传感器232;泵控能源组233;所述泵控能源组233的第一端与所述辅助油缸本体231的第一端管路连接,所述泵控能源组233的第二端与所述辅助油缸本体231的第二端管路连接;第二电磁比例阀234,所述第二电磁比例阀234的第一端与所述辅助油缸本体231的第一端管路连接,所述第二电磁比例阀234的第二端与所述辅助油缸本体231的第二端管路连接,所述第二电磁比例阀234的第三端与所述能源组24的第一端管路连接,所述第二电磁比例阀234的第四端与所述能源组24的第二端管路连接;
所述控制器与所述第二位移传感器232电连接;所述控制器用于获取所述支撑环的摇动程度,当所述摇动程度大于预设值时,根据所述摇动程度控制所述第一主支撑油缸21、第二主支撑油缸22以及辅助油缸23中管路的通断,以使所述第一主支撑油缸21和第二主支撑油缸22对所述支撑环进行一级减摇处理;并根据一级减摇处理后支撑环的摇动程度,确定泵控能源组233的排量信号,通过所述排量信号控制所述泵控能源组233进行排量后,获得所述第二位移传感器232反馈的所述辅助油缸本体231的第二位移,根据所述第二位移控制所述辅助油缸本体231对应的支撑环进行二级减摇处理,直至所述摇动程度小于或等于预设值。
42.本实施例中,辅助油缸23包括:辅助油缸本体231;第二位移传感器232;泵控能源组233以及第二电磁比例阀234;其中,辅助油缸本体231为液压缸,用于当能源组24为其供油时,将液压能转变为机械能,在能源组24的供油作用下做直线往复运动,以实现调平;和/或,用于当泵控能源组233为其供油时,将液压能转变为机械能,在泵控能源组233的供油作用下做直线往复运动,以实现减摇;泵控能源组233设置在辅助油缸本体231的第一端和辅助油缸本体231的第二端之间,泵控能源组233用于在进行减摇处理时对辅助油缸本体231输出液压油;第二电磁比例阀234用于根据控制器提供的指令信号连续地、按比例地控制辅助油缸本体231的动作;通过对第二电磁比例阀234的通断电,第二电磁比例阀234在线圈电流或电磁力的作用下,其内部的弹簧力与电磁力之间存在一定的比例,该比例影响其栓塞的行程和阀门开度,进而可控制辅助油缸本体231的动作。
43.其中,辅助油缸本体231上还设置的第二位移传感器232的安装方式可以是内置和外置等不同方式,可根据实际情况确定。
44.本发明一可选的实施例中,所述辅助油缸23还包括以下至少一个两位两通阀:第五两位两通阀235,所述第五两位两通阀235设置于所述第二电磁比例阀234的第一端与所述辅助油缸本体231的第一端之间的管路上;第六两位两通阀236,所述第六两位两通阀236设置于所述第二电磁比例阀234的第三端与所述能源组24的第一端之间的管路上;第七两位两通阀237,所述第七两位两通阀237设置于所述第二电磁比例阀234的第四端与所述能源组24的第二端之间的管路上;第八两位两通阀238,所述第八两位两通阀238设置于所述辅助油缸本体231的第二端的管路上;所述控制器与所述辅助油缸本体231的第五两位两通阀235、第六两位两通阀236、第七两位两通阀237以及第八两位两通阀238均电连接;所述控制器用于获取所述支撑环的摇动程度,当所述摇动程度大于预设值时,控制所述第六两位两通阀236、第七两位两通阀237、第二两位两通阀215以及第三两位两通阀216关闭,控制所述第一两位两通阀214和所述第五两位两通阀235开启。
45.本实施例中,两位两通阀可设置于管路上,用于控制油液的通断,第五两位两通阀235用于控制第二电磁比例阀234的第一端与辅助油缸本体231的第一端之间的管路上的油液的通断;第六两位两通阀236用于控制第二电磁比例阀234的第三端与能源组24的第一端之间的管路上的油液的通断;第七两位两通阀237用于控制第二电磁比例阀234的第四端与
能源组24的第二端之间的管路上的油液的通断。
46.其中,第八两位两通阀238设置于辅助油缸本体231的第二端的管路上,该辅助油缸本体231的第二端的管路还可以与蓄能器组239连通,当辅助油缸23的数量为多个时,该辅助油缸23中的第八两位两通阀238还可以与相邻的辅助油缸23中的辅助油缸本体231的第二端管路连通;另外,辅助油缸本体231相邻的第一主支撑油缸体211的第二端与辅助油缸本体231的第二端管路连接,该管路上设置有第四两位两通阀217;当需要进行减摇处理时,可以将该第四两位两通阀217关闭,同时,关闭第六两位两通阀236、第七两位两通阀237、第三两位两通阀216以及第二两位两通阀215,使得辅助油缸本体231由泵控能源组233提供液压油,实现减摇的效果。
47.需要说明的是,控制器对辅助油缸23的两位两通阀进行控制可以实现对支撑环的减摇,具体的,当控制器获取到的支撑环的摇动程度大于预设值时,控制所述第六两位两通阀236、第七两位两通阀237、第二两位两通阀215以及第三两位两通阀216关闭,同时,关闭辅助油缸本体231相邻的第一主支撑油缸体211的第二端与辅助油缸本体231的第二端之间的管路上的第四两位两通阀217,此时,阻断了能源组24向主支撑油缸的供油,控制第一两位两通阀214和所述第五两位两通阀235开启,各个主支撑油缸之间构成阻尼系统,辅助油缸23由泵控能源组233进行辅助减摇。
48.本发明一可选的实施例中,所述辅助油缸23还包括:第二安全阀2310,所述第二安全阀2310的第一端与所述辅助油缸本体231的第一端管路连接,所述第二安全阀2310的第二端与所述辅助油缸本体231的第二端管路连接。
49.该实施例中,第二安全阀2310与第一安全阀218的作用类似,第二安全阀2310用于保证辅助油缸本体231的压力和安全,第二安全阀2310的两端分别与辅助油缸本体231的第一端和第二端连通,当辅助油缸本体231的第一端和第二端之间的压力超过规定安全值时,安全阀打开,使辅助油缸本体231的第一端和第二端之间的压力不超过规定安全值,从而保证不因压力过高而发生安全事故。
50.本发明一可选的实施例中,所述辅助油缸23还包括:蓄能器组239,所述蓄能器组239与所述辅助油缸本体231的第二端管路连接。
51.本实施例中,由于控制系统的流量脉动较大,加上部分阀件在(两位两通阀、电磁比例阀等)工作中存在一定程度的振动,使整控制系统工作过程中可能产生较大脉动,严重时可能会导致控制系统产生强烈的振动,因此优选在控制系统的回路中增设了蓄能器组239,以此吸收压力脉动,减轻其对控制系统的影响。
52.如图2所示,一个具体的实施例中,支腿油缸还包括至少一个辅助油缸23,辅助油缸23包括:辅助油缸本体231;设置在辅助油缸本体231上的第二位移传感器232;设置在辅助油缸本体231的第一端与第二端之间的管路上的泵控能源组233;第二电磁比例阀234;第五两位两通阀235;第六两位两通阀236;第七两位两通阀237;第八两位两通阀238;第二安全阀2310以及蓄能器组239;其中,辅助油缸本体231的第一端与第二电磁比例阀234的第一端管路连通,该管路上设置有用于控制油液的通断的第五两位两通阀235;第二电磁比例阀234的第三端与能源组24的第一端管路连通,该管路上设置有用于控制油液的通断的第六两位两通阀236;第
二电磁比例阀234的第四端与能源组24的第二端管路连通,该管路上设置有用于控制油液的通断的第七两位两通阀237;辅助油缸本体231的第二端与第一主支撑油缸体211的第二端之间的管路上设置有第四两位两通阀217;另外,当需要添加更多的辅助油缸23时,可以以串联的方式,将待添加的辅助油缸本体231的第一端与边缘的辅助油缸本体231的第一端通过两位两通阀管路连接,将待添加的辅助油缸本体231的第二端与边缘的辅助油缸本体231的第二端通过第八两位两通阀238管路连接,依次类推。
53.如图2和图4所示,又一具体的实施例中,第一组支腿油缸包括第一主支撑油缸21、第二主支撑油缸22以及一个辅助油缸23,第二组支腿油缸包括第三主支撑油缸、第四主支撑油缸以及一个第一辅助油缸,第三组支腿油缸包括第五主支撑油缸、第六主支撑油缸以及一个第二辅助油缸,第四组支腿油缸包括第七主支撑油缸721、第八主支撑油缸722以及一个第三辅助油缸723;每个支腿油缸中的每个电磁比例阀的第四端与能源组24的第二端管路连接,每个电磁比例阀的第三端与能源组24的第一端管路连接,第一主支撑油缸21的第一端管路上设置的第一中间两位两通阀25与第三主支撑油缸的第一端的第二中间两位两通阀管路连接,第七主支撑油缸721的第一端的第四中间两位两通阀725与第五主支撑油缸的第一端的第三中间两位两通阀管路连接;另外,第三主支撑油缸的第一端的第二中间两位两通阀与第五主支撑油缸的第一端的第三中间两位两通阀管路连接;第一主支撑油缸21的第一端的第一中间两位两通阀25与第七主支撑油缸721的第一端的第四中间两位两通阀725管路连接,这样的连接方式,使得当进行减摇处理时,可以打开第一中间两位两通阀25、第二中间两位两通阀、第三中间两位两通阀以及第四中间两位两通阀725,使得第一主支撑油缸21、第二主支撑油缸22、第三主支撑油缸、第四主支撑油缸、第五主支撑油缸、第六主支撑油缸、第七主支撑油缸721以及第八主支撑油缸722对支撑环的阻尼作用更均衡。
54.下面对本发明的实施例的航天器海上发射的控制系统的工作原理进行说明:步骤1,控制器获取航天器的支撑环的倾斜度;步骤2,根据所述倾斜度,对所述航天器的支撑环进行调平处理,直至所述倾斜度小于或等于预设倾斜度;步骤3,控制器获取航天器的支撑环的摇动程度;步骤4,根据所述摇动程度,对所述航天器的支撑环进行减摇处理,直至摇动程度小于或等于预设值。
55.本实施例中,基于设置在距离发射船一定距离的控制器,对发射船上的航天器的控制系统进行控制,通过控制系统获取倾斜度,该倾斜度反馈了航天器的支撑环的水平偏移程度,优选地根据在支腿环上安装的水平测试仪反馈的第一信号,和/或在航天器上自带的惯性测量元件反馈的第二信号,确定倾斜度;根据倾斜度,确定主支撑油缸的第一电磁比例阀213的阀芯开度的控制信号,控制信号控制所有第一电磁比例阀213的阀芯开度后,获得第一位移传感器212反馈的第一主支撑油缸体211的第一位移,根据第一位移控制第一主支撑油缸体211对应的支撑环调平,直至倾斜度小于或等于预设倾斜度,即实现了航天器的支撑环的调水平;获取摇动程度,该摇晃程度反馈了航天器的支撑环的摇动程度,优选地根据设置
在支撑环上的水平测试仪反馈的第三信号,确定摇动程度;根据摇动程度,根据摇动程度控制第一主支撑油缸21、第二主支撑油缸22以及辅助油缸23中管路的通断,以使第一主支撑油缸21和第二主支撑油缸22对支撑环进行一级减摇处理;并根据一级减摇处理后支撑环的摇动程度,确定泵控能源组233的排量信号,通过排量信号控制泵控能源组233进行排量后,获得第二位移传感器232反馈的辅助油缸本体231的位移,根据位移控制辅助油缸本体231对应的支撑环进行二级减摇处理,直至摇动程度小于或等于预设值,解决了航天器在海上发射时复杂海况对发射姿态干扰,保证了航天器在海上发射的成功率。
56.本发明一可选的实施例中,步骤2包括:步骤21,按照预设顺序控制第一支撑环11、第二支撑环12、第三支撑环13以及第四支撑环14对应的第一两位两通阀214和第四两位两通阀217打开;步骤22,打开第四两位两通阀217;步骤23,获取每个支撑环的倾斜度;步骤24,根据所述倾斜度,确定每个第一主支撑油缸体211的控制信号;步骤25,根据所述控制信号控制第一电磁比例阀213的阀芯开度。
57.该实施例中,当对航天器的控制系统进行调平处理时,需要每个支撑环对应的每个第一主支撑油缸体211和/或辅助油缸本体231均相互连通,因此,打开设置在第一主支撑油缸体211和辅助油缸本体231之间、每个第一主支撑油缸体211之间的第四两位两通阀217,同时,打开第一主支撑油缸体211的第一端的第一两位两通阀214、两个相邻的第一主支撑油缸体211之间的第四两位两通阀217以及辅助油缸本体231的第一端的第五两位两通阀235;基于连通器原理,以使得航天器的支撑系统中的支腿油缸中的第一主支撑油缸21、第二主支撑油缸22和辅助油缸本体231形成均载,以满足调平效果。
58.其中,第一电磁比例阀213的阀芯开度的根据支撑环的倾斜度而定,通过在支撑环上安装的水平测试仪反馈的第一信号,和/或在航天器上自带的惯性测量元件反馈的第二信号,确定支撑环的倾斜度;控制器可根据该倾斜度确定控制信号,基于控制信号控制每个第一电磁比例阀213的阀芯开度;从而控制第一主支撑油缸体211和辅助油缸本体231,由于第一主支撑油缸体211设置有第一位移传感器212,辅助油缸本体231上设置有第二位移传感器232;位移传感器将油缸的当前位移状态通过位移传感信号的形式传输给控制器,控制器可根据位移传感信号确定油缸是否按照控制器的控制信号运动到位,直至将支撑环的第一信号和/或反馈的倾斜度小于或等于预设倾斜度。
59.需要说明的是,当航天器的控制系统包括多个支撑环时,应按照预设顺序依次打开每个支撑环对应的支腿油缸的第四两位两通阀217、第一两位两通阀214和第四两位两通阀217,该预设顺序可根据实际情况而定;优选地,每次打开一组支腿油缸的阀,尽量不在同一时刻打开多组支腿油缸的阀。
60.如图5和图6所示,一个具体的实施例中,航天器的控制系统包括第五支撑环81、第六支撑环82、第七支撑环83以及第八支撑环84,其中,第五支撑环81同时与第六支撑环82和第八支撑环84相邻设置,第七支撑环83同时与第六支撑环82和第八支撑环84相邻设置,第五支撑环81与第七支撑环83为一组支撑环,第六支撑环82与第八支撑环84为一组支撑环,每个支撑环对应的支腿油缸内包括第一主支撑油缸21、第二主支撑油缸22和辅助油缸本体
231,通过按照第五支撑环81、第六支撑环82、第七支撑环83以及第八支撑环84的顺序打开每个支撑环对应的支腿油缸内的第四两位两通阀217、第一两位两通阀214和第四两位两通阀217,使得四个支腿油缸形成均载,即满足四点调平的效果;当第六支撑环82和第八支撑环84对应的支腿油缸不平时,控制系统获取两个支腿油缸之间的倾斜角度α,根据该倾斜角度α确定支撑环的倾斜度,根据倾斜度,确定第一电磁比例阀213的控制信号,由控制信号控制第一电磁比例阀213的阀芯开度,通过设置在第一主支撑油缸21、第二主支撑油缸22和辅助油缸本体231的位移传感器将油缸的当前位移状态通过位移传感信号的形式传输给控制器,控制器可根据位移传感信号确定油缸是否按照控制器的控制信号运动到位,直至完成对第六支撑环82和第八支撑环84对应的支撑环的调平。
61.如图7所示,又一具体的实施例中,地面控制系统(控制器)根据每个支腿油缸的油缸(主支撑油缸和辅助油缸本体231)的倾斜度,对电磁比例阀发送控制信号,基于该控制信号对电磁比例阀的阀芯开度进行控制,从而控制电磁比例阀对应的支撑环的倾斜度,设置在油缸上的位置传感器将得到的位移的反馈信号反馈给地面控制系统,该反馈信号反馈油缸的运动是否到位,进而确定是否被调平,直至完成对支撑环的调平。
62.本发明一可选的实施例中,步骤4包括:步骤41,获取摇晃程度;步骤42,当所述摇动程度大于预设值时,关闭第六两位两通阀236、第七两位两通阀237、第二两位两通阀215以及第三两位两通阀216;步骤43,打开第一两位两通阀214和第五两位两通阀235;步骤44,若当前的摇晃程度仍大于预设值,向泵控能源组233发送排量信号;步骤45,所述泵控能源组233根据排量信号控制辅助油缸本体231的运动速度和位移。
63.如图8所示,本实施例中,由于海上风浪作用而船舶44发生摇摆,从而带动火箭支撑环42和火箭41的摇摆,对火箭41的发射造成不利影响,因此需对火箭支腿油缸43进行减摇,当所述摇动程度大于预设值时,进行一级减摇处理,即关闭第六两位两通阀236、第七两位两通阀237、第二两位两通阀215以及第三两位两通阀216,打开第一两位两通阀214和第五两位两通阀235;使得关闭了能源组24对第一主支撑油缸体211的供油,同时每个第一主支撑油缸体211均处于互联状态,第一主支撑油缸体211对火箭支撑环42产生阻尼支撑的作用;辅助油缸本体231由泵控能源组233控制,用于减摇辅助;此时,若在火箭支腿油缸43中的主支撑油缸的阻尼作用下的摇晃程度仍大于预设值,控制器可根据设置在火箭支撑环42上的水平测试仪的第三信号,向泵控能源组233发送排量信号;泵控能源组233根据排量信号控制辅助油缸本体231的运动速度和位移,同时辅助油缸本体231上设置的第二位移传感器232将位置反馈信号(第二位移)反馈至控制器,控制器根据位移反馈信号,判断是否仍进行减摇控制,以此达到消除摇摆的影响。
64.如图5、图9和图10所示,又一具体的实施例中,航天器的控制系统包括第五支撑环81、第六支撑环82、第七支撑环83以及第八支撑环84,其中,第五支撑环81同时与第六支撑环82和第八支撑环84相邻设置,第七支撑环83同时与第六支撑环82和第八支撑环84相邻设置,第五支撑环81与第七支撑环83为一组支撑环,第六支撑环82与第八支撑环84为一组支
撑环,每个支撑环对应的支腿油缸内包括第一主支撑油缸21、第二主支撑油缸22和辅助油缸本体231,通过关闭第六两位两通阀236、第七两位两通阀237、第二两位两通阀215以及第三两位两通阀216,使得每个支撑油缸关闭了能源组24的供油,如图9所示,第一主支撑油缸21以及第二主支撑油缸22构成主支撑油缸,每个辅助油缸本体231、第一主支撑油缸21以及第二主支撑油缸22的顶端设置有质量为m的负载(即支撑环对支腿油缸内油缸产生的重量);打开每个第一两位两通阀214和第五两位两通阀235,使得每个第一主支撑油缸体211互联,形成阻尼系统,此时,已对船体摇摆对支撑环造成的摇摆大幅减小,剩余的摇摆幅度可根据辅助油缸本体231进行主动调节,具体的:地面控制系统根据监测到的支撑环的摇摆程度,将其转化为控制每个泵控能源组233的泵排量的排量信号,通过泵控能源组233的油泵排量的变化,进而控制辅助油缸本体231的运动速度和位移,地面控制系统根据第二位移传感器232的位移反馈信号(第二位移),判断辅助油缸本体231是否仍进行控制,以此达到消除摇摆的影响或将摇摆控制到符合要求的范围。
65.本发明的实施例通过固定于发射船上的至少一组支撑环,所述至少一组支撑环中包括两个支撑环,所述两个支撑环关于航天器对称设置;所述至少一组支撑环中的每一组支撑环均通过一组支腿油缸与发射船固定连接;控制器,与所述每一组支撑环对应的支腿油缸电连接,所述控制器用于获取所述支撑环的倾斜度,根据所述支腿油缸对支撑环进行调平控制;本发明的方案解决了航天器在海上发射时复杂海况对发射姿态干扰,该支撑系统可实现调平和减摇,保证了航天器在海上发射的成功率。
66.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1