基于无人机和图像处理的小麦产量预测用麦穗计数系统
1.本发明涉及农田产量预估技术领域,尤其涉及基于无人机和图像处理的小麦产量预测用麦穗计数系统。
背景技术:
2.小麦是我国主要的粮食作物,其播种面积与产量均位居各种粮食作物中的前列。因此,小麦的产量对国民经济、粮食安全均具有重要的影响。麦穗计数是预测小麦产量的一种重要手段,对小麦新品种培育、病损灾害评估和优质生产具有重要的意义,如何快速准确计算出单位面积小麦积穗数,对小麦测产有重要意义。基于图像处理技术通过无人机使用工业相机拍摄取样图像,再对图像进行纹理特征分析,从而获得对取样区域麦穗的数量统计。
3.起落架是无人机飞行器重要的具有承力兼操纵性的部件,其性能的优劣直接关系到无人机的使用安全。现有的无人机飞控系统支架较为简单,使得降落时不稳,容易产生晃动发生撞击,进而对无人机内部元件发生损害,影响无人机飞控系统工作;且由于农田地面坑洼多,着陆条件差,易在着陆时发生倾倒、撞毁;同时在有斜度的路面着陆或停放时,无人机自行滑动,造成倾倒或撞击,机翼伸出机身较远距离,使得机翼与地面接触,对设备造成过多损坏。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的问题,而提出的基于无人机和图像处理的小麦产量预测用麦穗计数系统。
5.为了实现上述目的,本发明采用了如下技术方案:
6.基于无人机和图像处理的小麦产量预测用麦穗计数系统,包括机载端和地面接收处理端,所述机载端和地面接收处理端通过无线传输模块连接,所述机载端包括机身以及设置在机身上的高清摄像头,所述机身上设置有连接臂,所述连接臂上设置有驱动轴,所述驱动轴上设置有双层机翼,所述双层机翼包括设置在驱动轴上的上机翼和下机翼,所述上机翼和下机翼之间活动设置有第一弹性伸缩杆,且所述下机翼内设置有用于连接上机翼的定位组件,所述机身的底部设置有缓冲座,所述缓冲座上设置有抓地组件,所述缓冲座与定位组件之间设置有导气管,所述机身下方还设置有用于遮挡高清摄像头的防护机构,所述抓地组件驱动防护机构工作。
7.优选的,所述下机翼包括套设在驱动轴上的活动座以及固设在活动座上的机翼主体,所述活动座上开设有用于驱动轴活动的活动槽,所述活动槽的两侧内壁均固设有第二弹性伸缩杆,所述第二弹性伸缩杆远离活动槽内壁的一端连接有与驱动轴贴合的弧形块。
8.优选的,所述弧形块上开设有轨道槽,所述轨道槽内通过销轴转动连接有滚轮,所述驱动轴上开设有与滚轮相配合的导向槽。
9.优选的,所述定位组件包括开设在下机翼上的滑动槽,所述滑动槽内壁滑动连接
有第二活塞,所述第二活塞上固设有推杆,所述推杆上套设有第二弹性元件,所述第二弹性元件的两端分别与第二活塞和滑动槽的内壁相连,所述推杆远离第二活塞的一端穿过下机翼并连接有连接板,所述连接板上固设有插杆,所述上机翼上开设有与插杆相配合的插孔,所述上机翼与驱动轴固定相连。
10.优选的,所述缓冲座包括与机身固连的导杆,所述导杆外侧套设有缓冲套管,所述缓冲套管内滑动连接有第一活塞,所述第一活塞与导杆固连,且所述第一活塞背离导杆的一侧与缓冲套管的内壁之间设置有第一弹性元件,所述导气管与缓冲套管相连,且所述导气管远离缓冲套管的一端依次穿过机身、连接臂和下机翼并与滑动槽相互连通。
11.优选的,所述抓地组件包括固设在缓冲套管上的耳板,所述耳板上转动连接有转轴,所述转轴上固设有抓地杆,所述转轴与耳板周向之间设置有用于抓地杆复位转动的扭簧,所述抓地杆远离转轴的一端连接有勾爪部,所述抓地组件还包括固设在机身底部的固定杆,所述固定杆的底部固设有弧形板,所述弧形板与抓地杆的侧壁活动相抵。
12.优选的,所述防护机构包括防护组件和驱动组件,所述防护组件包括滑动连接在高清摄像头上的防护板,所述防护板与机身上均设置有定位板,两个所述定位板之间设置有第三弹性元件。
13.优选的,所述驱动组件包括通过转杆转动连接在机身底部的动齿轮,所述动齿轮的两侧均啮合连接有齿条板,每个所述齿条板上均固定连接有移动板,所述移动板上设置有插块,所述防护板上开设有与插块相配合的插槽,所述机身的底部设置有固定板,所述固定板上连接有侧板,所述侧板上滑动连接有导向杆,所述导向杆与移动板固定相连,所述导向杆上套设有第四弹性元件,所述第四弹性元件的两端分别与移动板和侧板相连,所述驱动组件还包括与抓地杆固连的拉绳,所述拉绳远离抓地杆的一端穿过固定杆并与移动板相连。
14.优选的,所述防护板上设置有清洁棉,所述清洁棉与高清摄像头活动相抵。
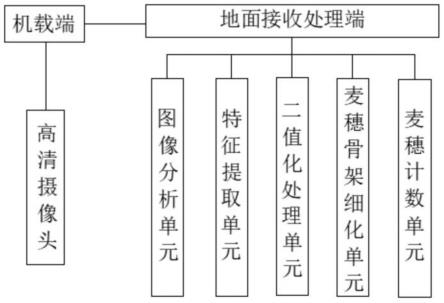
15.优选的,所述地面接收处理端包括:
16.图像分析单元,用于分析采集的麦穗图像;
17.特征提取单元,用于提取所述麦穗图像的麦穗特征信息;
18.二值化处理单元,用于根据所述麦穗特征信息获取二值化图像;
19.麦穗骨架细化单元,用于将所述二值化图像进行细化处理,得到麦穗骨架图像;
20.麦穗计数单元,用于根据所述麦穗骨架图像确定麦穗骨架数量及麦穗骨架拐点数量,并将所述麦穗骨架数量及麦穗骨架拐点数量之和作为麦穗数量。
21.与现有技术相比,本发明提供了基于无人机和图像处理的小麦产量预测用麦穗计数系统,具备以下有益效果:
22.1、该基于无人机和图像处理的小麦产量预测用麦穗计数系统,通过在机身的底部设置缓冲座,可以对机身下降时产生的惯性冲击力进行缓冲,使无人机降落的更加稳定,从而保护无人机内部的元件不易受损,提高降无人机的使用寿命。
23.2、该基于无人机和图像处理的小麦产量预测用麦穗计数系统,通过将机翼设置为双层,且两层之间为弹性设置,可以避免无人机降落倾倒时机翼与地面接触时受到剧烈撞击,提高机翼的缓冲减震效果,避免机翼受损。
24.3、该基于无人机和图像处理的小麦产量预测用麦穗计数系统,通过定位组件对弹
性设置的两层机翼之间进行固定,防止无人机在转动时两侧机翼之间摆动,影响无人机的飞行效果。
25.4、该基于无人机和图像处理的小麦产量预测用麦穗计数系统,通过缓冲座在对无人机下降时产生的力度进行缓冲时,抓地组件工作,提高无人机对地面的抓地效果,提高无人机降落时的稳定性,避免无人机在有斜度的路面着陆或停放时,无人机自行滑动,造成倾倒或撞击。
26.5、该基于无人机和图像处理的小麦产量预测用麦穗计数系统,通过无人机着陆时驱动防护机构工作,使防护板自动对高清摄像头进行遮挡,避免高清摄像头暴露在外容易受损及容易染尘。
附图说明
27.图1为本发明的结构示意图;
28.图2为本发明的机身底部的结构示意图;
29.图3为本发明的双层机翼的结构示意图;
30.图4为本发明的下机翼的剖面结构示意图;
31.图5为本发明的活动座的剖面结构示意图;
32.图6为本发明的缓冲座的结构示意图;
33.图7为本发明的缓冲座的剖面结构示意图;
34.图8为本发明的抓地组件与防护机构的结构示意图;
35.图9为本发明的图8中a部局部放大示意图;
36.图10为本发明的防护板与移动板的结构示意图;
37.图11为本发明的工作原理框图。
38.图中:1、机身;2、连接臂;3、驱动轴;301、导向槽;4、双层机翼;401、上机翼;402、下机翼;4021、活动座;4022、机翼主体;403、第一弹性伸缩杆;5、缓冲座;501、缓冲套管;502、导杆;503、第一活塞;504、第一弹性元件;6、导气管;7、活动槽;701、第二弹性伸缩杆;702、弧形块;7021、轨道槽;7022、滚轮;8、滑动槽;801、第二活塞;802、推杆;803、第二弹性元件;804、连接板;805、插杆;806、插孔;9、耳板;901、转轴;902、抓地杆;9021、勾爪部;903、扭簧;10、高清摄像头;11、固定杆;111、弧形板;12、防护板;121、插槽;13、定位板;131、第三弹性元件;14、动齿轮;141、齿条板;15、移动板;151、插块;152、导向杆;1521、第四弹性元件;16、固定板;161、侧板;17、拉绳;18、清洁棉。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
40.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
41.实施例1:
42.参照图1、图2、图3、图4、图5、图6和图7,基于无人机和图像处理的小麦产量预测用麦穗计数系统,包括机载端和地面接收处理端,机载端和地面接收处理端通过无线传输模块连接,机载端包括机身1以及设置在机身1上的高清摄像头10,机身1上设置有连接臂2,连接臂2上设置有驱动轴3,驱动轴3上设置有双层机翼4,双层机翼4包括设置在驱动轴3上的上机翼401和下机翼402,上机翼401和下机翼402之间活动设置有第一弹性伸缩杆403,且下机翼402内设置有用于连接上机翼401的定位组件,机身1的底部设置有缓冲座5,缓冲座5上设置有抓地组件,缓冲座5与定位组件之间设置有导气管6,机身1下方还设置有用于遮挡高清摄像头10的防护机构,抓地组件驱动防护机构工作。
43.具体的,工作人员通过无人机上的高清摄像头10对农田内的农作物进行拍摄采集图像,通过无线传输模块传递至地面接收处理端对采集的图像数据进行分析处理,进而对农田内的农作物产量进行预估,当无人机使用完毕后,工作人员控制无人机下降着落,通过缓冲座5可以对机身1下降时产生的惯性冲击力进行缓冲,使无人机降落的更加稳定,并将机翼设置为双层,且两层之间为弹性设置,可以避免无人机降落倾倒时机翼与地面接触时受到剧烈撞击,提高机翼的缓冲减震效果,避免机翼受损;且在对机身1下降的力度进行缓冲时,抓地组件工作,提高无人机对地面的抓地效果,进一步提高无人机降落时的稳定性,无人机着陆后防护机构对高清摄像头10进行遮挡,从而保护无人机上的元件不易受损,提高降无人机的使用寿命。
44.实施例2:
45.参照图1、图3、图4和图5,基于无人机和图像处理的小麦产量预测用麦穗计数系统,与实施例1相同,更进一步的是,下机翼402包括套设在驱动轴3上的活动座4021以及固设在活动座4021上的机翼主体4022,活动座4021上开设有用于驱动轴3活动的活动槽7,活动槽7的两侧内壁均固设有第二弹性伸缩杆701,第二弹性伸缩杆701远离活动槽7内壁的一端连接有与驱动轴3贴合的弧形块702。
46.进一步的,弧形块702上开设有轨道槽7021,轨道槽7021内通过销轴转动连接有滚轮7022,驱动轴3上开设有与滚轮7022相配合的导向槽301。
47.具体的,通过将机翼设置为双层,且两层之间为弹性设置,当无人机倾倒时,伸出机身1较远距离的机翼会与地面接触,下机翼402与地面接触后,下机翼402一侧受力,使得两侧的第一弹性伸缩杆403一个被拉伸,一个被压缩,对机翼的受力大小进行减弱,且由于下机翼402缓冲减震时偏转,通过设置弧形块702,使下机翼402一侧受力被拉动时,弧形块702与驱动轴3相互贴合,第二弹性伸缩杆701发生形变,降低下机翼402与驱动轴3的磨损程度,且弧形块702内的滚轮7022滑动在导向槽301内,可提高下机翼402缓冲移动的稳定性,避免下机翼402在下移过程中转动,从而使得无人机降落倾倒时避免机翼与地面接触时受到剧烈撞击,提高机翼的缓冲减震效果,避免机翼受损。
48.实施例3:
49.参照图1、图2、图4和图7,基于无人机和图像处理的小麦产量预测用麦穗计数系统,与实施例2相同,更进一步的是,定位组件包括开设在下机翼402上的滑动槽8,滑动槽8内壁滑动连接有第二活塞801,第二活塞801上固设有推杆802,推杆802上套设有第二弹性元件803,第二弹性元件803的两端分别与第二活塞801和滑动槽8的内壁相连,推杆802远离第二活塞801的一端穿过下机翼402并连接有连接板804,连接板804上固设有插杆805,上机
翼401上开设有与插杆805相配合的插孔806,上机翼401与驱动轴3固定相连。
50.进一步的,缓冲座5包括与机身1固连的导杆502,导杆502外侧套设有缓冲套管501,缓冲套管501内滑动连接有第一活塞503,第一活塞503与导杆502固连,且第一活塞503背离导杆502的一侧与缓冲套管501的内壁之间设置有第一弹性元件504,导气管6与缓冲套管501相连,且导气管6远离缓冲套管501的一端依次穿过机身1、连接臂2和下机翼402并与滑动槽8相互连通。
51.具体的,无人机飞行状态时,通过定位组件对弹性设置的两层机翼之间进行固定,防止无人机在转动时两侧机翼之间摆动,影响无人机的飞行效果;当无人机着陆后,无人机底部的缓冲座5工作,缓冲套管501与地面接触,缓冲套管501相对导杆502上移,第一弹性元件504被压缩,对机身1的下冲力度进行缓冲,避免机身1内部元件受力晃动受损,缓冲套管501相对导杆502上移时,导杆502下方的第一活塞503挤压缓冲套管501内的空气,这些空气通过导气管6进入下机翼402内部的滑动槽8并对第二活塞801产生推力,第二活塞801通过推杆802带动连接板804移动,进而使连接板804带动与之相连的插杆805移出插孔806,解除下机翼402与上机翼401之间的固定关系,此时若机身1因在有斜度的路面着陆或停放时倾倒,下机翼402可以起到缓冲减震的作用,从而避免机体受损。
52.实施例4:
53.参照图1、图2、图6、图8和图9,基于无人机和图像处理的小麦产量预测用麦穗计数系统,与实施例3相同,更进一步的是,抓地组件包括固设在缓冲套管501上的耳板9,耳板9上转动连接有转轴901,转轴901上固设有抓地杆902,转轴901与耳板9周向之间设置有用于抓地杆902复位转动的扭簧903,抓地杆902远离转轴901的一端连接有勾爪部9021,抓地组件还包括固设在机身1底部的固定杆11,固定杆11的底部固设有弧形板111,弧形板111与抓地杆902的侧壁活动相抵。
54.具体的,缓冲座5对机身1进行缓冲时,缓冲套管501相对导杆502及机身1上移,缓冲套管501上移时带动与之相连的抓地杆902移动,抓地杆902由于其上侧与弧形板111相贴合,使得抓地杆902相对缓冲套管501偏转,抓地杆902向缓冲套管501靠近,使抓地杆902带动勾爪部9021对着陆的地面进行勾爪,提高无人机的抓地力,防止在有斜度的路面着陆或停放时,无人机自行滑动,造成倾倒或撞击,提高了无人机使用的安全性和稳定性。
55.实施例5:
56.参照图1、图2、图8、图9和图10,基于无人机和图像处理的小麦产量预测用麦穗计数系统,与实施例4相同,更进一步的是,防护机构包括防护组件和驱动组件,防护组件包括滑动连接在高清摄像头10上的防护板12,防护板12与机身1上均设置有定位板13,两个定位板13之间设置有第三弹性元件131。
57.进一步的,驱动组件包括通过转杆转动连接在机身1底部的动齿轮14,动齿轮14的两侧均啮合连接有齿条板141,每个齿条板141上均固定连接有移动板15,移动板15上设置有插块151,防护板12上开设有与插块151相配合的插槽121,机身1的底部设置有固定板16,固定板16上连接有侧板161,侧板161上滑动连接有导向杆152,导向杆152与移动板15固定相连,导向杆152上套设有第四弹性元件1521,第四弹性元件1521的两端分别与移动板15和侧板161相连,驱动组件还包括与抓地杆902固连的拉绳17,拉绳17远离抓地杆902的一端穿过固定杆11并与移动板15相连。
58.具体的,无人机着陆后,抓地组件工作时,抓地杆902在弧形板111的抵压下偏转,使抓地杆902通过拉绳17对移动板15作用力,移动板15的移动会带动插块151移出防护板12的插槽121,使防护板12不再受到限制,防护板12在第三弹性元件131的拉扯下复位,使得防护板12对高清摄像头10进行遮挡,避免高清摄像头10未使用时暴露在外容易受损及容易染尘,需要说明的是,即便路面不平,机身1只有一侧与地面相接,该侧缓冲座5和抓地组件工作,使该侧移动板15被拉绳17拉动,该移动板15上的齿条板141与动齿轮14啮合,使动齿轮14带动另一个齿条板141移动,进而使另一侧的移动板15被推动,使得防护板12不再受限制从而对摄像头进行遮挡防护,实用性强。
59.实施例6:
60.参照图8,基于无人机和图像处理的小麦产量预测用麦穗计数系统,与实施例5相同,更进一步的是,防护板12上设置有清洁棉18,清洁棉18与高清摄像头10活动相抵。
61.具体的,在防护板12来回移动时,防护板12上的清洁棉18对高清摄像头10进行擦拭,使得高清摄像头10在使用前和使用后均可以得到清理,保证高清摄像头10采集的图像效果。
62.实施例7:
63.参照图1和图11,基于无人机和图像处理的小麦产量预测用麦穗计数系统,与实施例1相同,更进一步的是,所述地面接收处理端包括:
64.图像分析单元,用于分析采集的麦穗图像;
65.特征提取单元,用于提取所述麦穗图像的麦穗特征信息;
66.二值化处理单元,用于根据所述麦穗特征信息获取二值化图像;
67.麦穗骨架细化单元,用于将所述二值化图像进行细化处理,得到麦穗骨架图像;
68.麦穗计数单元,用于根据所述麦穗骨架图像确定麦穗骨架数量及麦穗骨架拐点数量,并将所述麦穗骨架数量及麦穗骨架拐点数量之和作为麦穗数量。
69.具体的,通过无人机上的高清摄像头对田地中农作物的图像进行大规模的采集,以便后期建立数据库。采集数据后从其中随机抽选其中的80%作为训练集,剩余的20%作为测试集。以农田中的麦穗为例,步骤如下:
70.s1:获取待测区域内的麦穗图像并对其进行分析;
71.s2:提取所述麦穗图像的麦穗特征信息;
72.s3:根据所述麦穗特征信息获取二值化图像;
73.s4:将所述二值化图像进行细化处理,得到麦穗骨架图像;
74.s5:根据所述麦穗骨架图像确定麦穗骨架数量及麦穗骨架拐点数量,并将所述麦穗骨架数量及麦穗骨架拐点数量之和作为麦穗数量。
75.从而实现小麦麦穗计数的无损测量,通过图像预处理操作增强了小麦麦穗与背景的对比度,通过麦穗图像的颜色特征和纹理特征的归一化处理以及支持向量机svm方法提高了二值化图像的处理效率及质量,优化拟采用的fastr-cnn网络方法提高其精度和速度,对小麦长势监测、产量估算等方面具有十分重要的意义。
76.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1