一种被动柔顺式全地形星球探测车
1.本发明涉及星球探测技术领域,具体而言,涉及一种被动柔顺式全地形星球探测车。
背景技术:
2.目前已成功运行的星球探测车主要用于行驶在平坦型面,火星等星球上土壤构成复杂,其表面地形复杂多变,星球探测车的地形适应能力有待提高。例如,为了例避免地形冲击对传动装置、电气装置以及科学探测仪器的损伤,星球探测车的只能以较低的移动速度行驶,极大地影响了探测范围,降低了科学探测效率。
技术实现要素:
3.本发明旨在一定程度上解决相关技术中如何提高被动柔顺式全地形星球探测车的适应性和可靠性的问题。
4.为至少在一定程度上解决上述问题的一个方面,本发明提供一种被动柔顺式全地形星球探测车,包括车架、平衡杆系、减震器以及用于安装车轮的摆臂,所述摆臂与所述车架转动连接;
5.所述平衡杆系与所述车架活动连接,且所述平衡杆系与横向上位于不同侧的至少l1个所述摆臂分别连接,以实现所述摆臂之间的传力,其中l1≥2,且l1为整数;
6.所述平衡杆系、所述车架以及所述平衡杆系所连接的所述摆臂共同形成空间闭链结构,所述减震器用于与所述空间闭链结构连接,以对所述空间闭链结构的运动进行缓冲。
7.可选地,所述平衡杆系包括平衡杆和多个连接杆,至少l1个所述摆臂分别通过所述连接杆连接至所述平衡杆;
8.所述平衡杆具有相对于所述车架的m1个自由度,其中,m1个自由度中包括所述平衡杆与所述车架在水平面内转动连接所形成的一个自由度;
9.所述空间闭链结构的自由度与所述平衡杆的自由度一致,所述空间闭链结构所连接的所述减震器用于限制所述空间闭链结构的m1个自由度中的m2个自由度,其中,m1和m2均为整数;
10.当l1=2时,m1=m2=1;
11.当l1>2时,m1-m2=1,且m2≥1。
12.可选地,所述空间闭链结构的数量大于1时,所述空间闭链结构之间通过所述减震器连接。
13.可选地,所述减震器包括抗扭机构,所述抗扭机构的一端的两端分别与不同所述空间闭链结构的平衡杆连接;
14.或者,所述减震器的两端分别与位于横向同一侧的所述摆臂连接。
15.可选地,当l1>2时,m1个自由度中还包括所述平衡杆与所述车架在竖向上滑动连接的平移自由度;
16.所述减震器的两端分别与位于横向同一侧的摆臂连接;或者,所述减震器在竖向的两端分别与所述车架和所述平衡杆连接。
17.可选地,当独立的所述摆臂的数量不为零时,每个独立的所述摆臂分别通过一个所述减震器位于横向同一侧的所述空间闭链结构的所述摆臂连接,其中,独立的所述摆臂为没有连接所述连接杆的所述摆臂。
18.可选地,当减震器的两端分别与两个所述摆臂连接时,所述减震器的两端分别与两个所述摆臂转动连接。
19.可选地,所述平衡杆通过所述连接杆分别与至少l1个所述摆臂连接,所述连接杆的两端均通过球铰连接结构分别与对应的所述摆臂以及所述平衡杆连接。
20.可选地,所述摆臂包括呈夹角设置的第一杆段和第二杆段,其中,所述第一杆段和所述第二杆段的连接处与所述车架转动连接,所述第二杆段向上延伸设置,且用于与所述连接杆连接。
21.可选地,所述摆臂的数量设置为至少四个,至少l1个所述摆臂中包括位于对角的两个所述摆臂,当其中一个所述摆臂受到所述车轮传递的来自地面的冲击时,位于对角的两个所述摆臂上连接所述车轮的一端用于相对于车架在竖向上朝相同的方向运动;
22.和/或,至少l1个所述摆臂中包括横向上位于相对位置的两个所述摆臂,当其中一个所述摆臂受到所述车轮传递的来自地面的冲击时,横向上位于相对位置的两个所述摆臂连接所述车轮的一端用于相对于车架在竖向上朝相反的方向运动。
23.相对于相关现有技术,本发明的被动柔顺式全地形星球探测车,其悬架包括平衡杆系和减震器,通过平衡杆系实现横向上不同侧的至少两个摆臂之间的传力,能够在一定程度上使该至少两个摆臂之间的传力,使得该两个摆臂之间联动,能够在一定程度上提高被动柔顺式全地形星球探测车的抗侧倾能力,与此同时,通过减震器对空间闭链结构的运动进行缓冲,能够在确保被动柔顺式全地形星球探测车的全轮附着能力的基础上,对被动柔顺式全地形星球探测车进行减震,悬架的自适应性高,并且,可以降低减震器的数量,例如无需对应于所有车轮分别设置减震器。本发明的被动柔顺式全地形星球探测车发明的被动柔顺式全地形星球探测车,主要用于星球表面高速移动,能够兼顾全轮附着需求和高速移动的减震需求,避免了传统方式中各车轮分别对应设置减震器时在垂向、俯仰与侧倾方向刚度耦合造成在星球探测车倾斜地面的不稳定性,被动柔顺式全地形星球探测车在崎岖地形运动的柔顺性高,适应能力强,能够避免地形冲击对传动装置、电气装置以及科学探测仪器的损伤,保证科学探测的高可靠性。
附图说明
24.图1为本发明的第一实施例中被动柔顺式全地形星球探测车的机构简图;
25.图2为本发明的第一实施例中被动柔顺式全地形星球探测车的平衡杆在俯视方向上做顺时针转动的示意图;
26.图3为本发明的第一实施例中被动柔顺式全地形星球探测车的立体结构示意图;
27.图4为本发明的第二实施例中被动柔顺式全地形星球探测车的机构简图;
28.图5为本发明的第二实施例中被动柔顺式全地形星球探测车的等效机构简图;
29.图6为本发明的第二实施例中被动柔顺式全地形星球探测车的平衡杆在俯视方向
上做顺时针转动的示意图;
30.图7为本发明的第二实施例中被动柔顺式全地形星球探测车的立体结构示意图;
31.图8为本发明的第二实施例中被动柔顺式全地形星球探测车的另一方案的立体结构示意图;
32.图9为本发明的第三实施例中被动柔顺式全地形星球探测车的机构简图;
33.图10为本发明的第三实施例中被动柔顺式全地形星球探测车的平衡杆在俯视方向上做顺时针转动的示意图;
34.图11为本发明的第三实施例中被动柔顺式全地形星球探测车的立体结构示意图;
35.图12为本发明的第四实施例中被动柔顺式全地形星球探测车的机构简图;
36.图13为本发明的第四实施例中被动柔顺式全地形星球探测车的平衡杆在俯视方向上做顺时针转动的示意图;
37.图14为本发明的第四实施例中被动柔顺式全地形星球探测车的立体结构示意图;
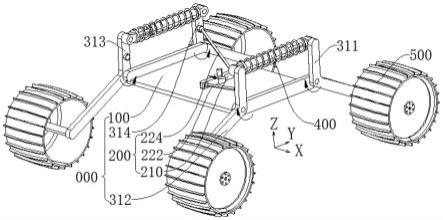
38.图15为本发明的第四实施例中被动柔顺式全地形星球探测车的另一视角的结构示意图;
39.图16为图15中a-a截面的剖面示意图;
40.附图标记说明:
41.000-空间闭链结构;100-车架;200-平衡杆系;210-平衡杆;220-连接杆;221-右前连接杆;222-右后连接杆;223-左后连接杆;224-左前连接杆;300-摆臂;311-右前摆臂;312-右后摆臂;313-左后摆臂;314-左前摆臂;315-独立摆臂;301-第一杆段;302-第二杆段;400-减震器;410-抗扭机构;420-减震弹簧;430-减震阻尼器;500-车轮;511-右前车轮;512-右后车轮;513-左后车轮;513-左前车轮。
具体实施方式
42.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
43.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
44.在本说明书的描述中,参考术语“实施例”、“一个实施例”、“一些实施方式”、“示例性地”和“一个实施方式”等的描述意指结合该实施例或实施方式描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或实施方式中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实施方式。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或实施方式以合适的方式结合。
45.术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。这样,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
46.附图中z轴表示竖向,也就是上下位置,并且z轴的正向(也就是z轴的箭头指向)表示上,z轴的负向(也就是与z轴的正向相反的方向)表示下;附图中x轴表示水平方向,并指
定为左右位置,并且x轴的正向(也就是x轴的箭头指向)表示右侧,x轴的负向(也就是与x轴的正向相反的方向)表示左侧;附图中y轴表示前后位置,并且y轴的正向(也就是y轴的箭头指向)表示前侧,y轴的负向(也就是与y轴的正向相反的方向)表示后侧;同时需要说明的是,前述z轴、y轴及x轴的表示含义仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
47.参考图12,本发明提供一种被动柔顺式全地形星球探测车,其包括车架100、平衡杆系200、减震器400以及用于安装车轮500的摆臂300,所述摆臂300与所述车架100转动连接;
48.所述平衡杆系200与所述车架100活动连接,且所述平衡杆系200与横向上位于不同侧的至少l1个所述摆臂300分别连接,以实现所述摆臂300之间的传力,其中l1≥2,且l1为整数;
49.所述平衡杆系200、所述车架100以及所述平衡杆系200所连接的所述摆臂300共同形成空间闭链结构000,所述减震器400用于与所述空间闭链结构000连接,以对所述空间闭链结构000的运动进行缓冲。
50.在本说明中为了描述方便,横向是指被动柔顺式全地形星球探测车的宽度方向,即图中的x轴方向,纵向是指被动柔顺式全地形星球探测车的长度方向,也就是被动柔顺式全地形星球探测车的前进方向,即图中的y轴上方,竖向是指被动柔顺式全地形星球探测车的上下方向,即图中的z轴方向,摆臂300与车架100转动连接的轴向与横向一致,但需要说明的是,在不违反本发明的设计构思的情况下,其角度可以容许一定的误差,后续不再详细说明。
51.需要说明的是,上述平衡杆系200的设置不应使得摆臂300相对于车架100的位置固定,但其可以在受到车架100重力影响,摆臂300相对于车架100转动时,在所连接的摆臂300之间传递作用力。
52.需要说明的是,也可以说,被动柔顺式全地形星球探测车通过平衡杆系200、减震器400以及摆臂300形成悬架,实现车轮500与车架100之间的连接。
53.如此,相对于相关技术,本发明的被动柔顺式全地形星球探测车,其悬架包括平衡杆系200和减震器400,通过平衡杆系200实现横向上不同侧的至少两个摆臂300之间的传力,能够在一定程度上使该至少两个摆臂300之间的传力,使得该两个摆臂300之间联动,能够在一定程度上提高被动柔顺式全地形星球探测车的抗侧倾能力,与此同时,通过减震器400对空间闭链结构000的运动进行缓冲,能够在确保被动柔顺式全地形星球探测车的全轮附着能力的基础上,对被动柔顺式全地形星球探测车进行减震,被动悬架的自适应性高,并且,可以降低减震器400的数量,例如无需对应于所有车轮500分别设置减震器400。本发明的被动柔顺式全地形星球探测车,主要用于星球表面高速移动(例如1m/s,相对于目前无人星球探测车的运动速度高1至2个数量级),能够兼顾全轮附着需求和高速移动的减震需求,避免了传统方式中各车轮500分别对应设置减震器时在垂向、俯仰与侧倾方向刚度耦合造成在星球探测车倾斜地面的不稳定性,被动柔顺式全地形星球探测车在崎岖地形运动的柔顺性高,适应能力强,能够避免地形冲击对传动装置、电气装置以及科学探测仪器的损伤,保证科学探测的高可靠性。
54.本说明书中为便于说明,以图示四个车轮500的情况为例说明本发明的内容,具体地,将位于y轴反方向且位于x轴正向的车轮500定义为右后车轮512,将顺时针方向的其他车轮500依次定义为左后车轮513、左前车轮514以及右前车轮511,其中,右后车轮512对应的摆臂300可以定义为右后摆臂312,依次类推,其他摆臂300分别为左后摆臂313、左前摆臂314以及右前摆臂311,后续不再说明。
55.参考图12,在本发明的可选实施例中,所述平衡杆系200包括平衡杆210和多个连接杆220,至少l1个所述摆臂300分别通过所述连接杆220连接至所述平衡杆210;
56.所述平衡杆210具有相对于所述车架100的m1个自由度,其中,m1个自由度中包括所述平衡杆210与所述车架100在水平面内转动连接所形成的一个自由度;
57.所述空间闭链结构000的自由度与所述平衡杆210的自由度一致,所述空间闭链结构000所连接的所述减震器400用于限制所述空间闭链结构000的m1个自由度中的m2个自由度,其中,m1和m2均为整数;
58.其中,当l1=2时,m1=m2=1。
59.具体地,平衡杆210与车架100的转动轴向与竖向一致,也即图中的z轴方向一致。
60.需要说明的是,减震器400限制空间闭链结构000的自由度,是指其能够对该自由度形成缓冲,最终达到减震的目的,而不是指减震器400使得该自由度例如转动自由度消失。上述m2个自由度中任一确定的自由度可以是由一个减震器400形成,也可以是由多个减震器400共同形成,此时,形成冗余减震器400,例如后文描述的图6中的两个减震器400就是如此,后续不再详细说明。
61.参考图14所示,此时,平衡杆210仅具有与车架100的一个转动自由度,位于对角的两个摆臂300(右后摆臂312和左前摆臂314)分别通过连接杆220与平衡杆210连接,且连接杆220的两端均通过球铰连接结构分别与对应的所述摆臂300以及所述平衡杆210连接。
62.此时,图14所示的空间闭链结构000的计算自由度有:
[0063][0064]
这里n是构件的数目,这里是6;g是关节数目,这里是7;fi是第i个关节的自由度数目,转动副为1,球副为3;μ是并联冗余约束(此时为零),得出空间闭链结构000的计算自由度为3,3个自由度有两个为平衡杆210绕自身转轴旋转的局部自由度(平衡杆210两端各一个),因此,图14所示的空间闭链结构000的实际自由度为:m1=f-2=3-2=1。
[0065]
此时,对应于空间闭链结构000设置的减震器400能够对平衡杆210的转动进行缓冲即可,减震器400可以是直接或间接减缓平衡杆210的转动。例如,减震器400包括例如扭簧等抗扭机构410,抗扭机构410分别与平衡杆210和车架100连接即可(此方案图中未示出)。
[0066]
示例性地,减震器400的一端与右后摆臂312连接,另一端与右前摆臂311连接,右前摆臂311和右后摆臂312可以属于不同的空间闭链结构000(参考图1和图4),或者,右前摆臂311属于后文描述的独立摆臂315(参考图14),此处不再详细说明。
[0067]
当然,在上述可选实施例中,l1也可以是l1>2,当l1>2时,m1-m2=1,且m2≥1。
[0068]
参考图9、图10和图11所示,此时,m1个自由度中既包括上述水平面内的转动自由度,还包括所述平衡杆210与所述车架100在竖向上滑动连接的平移自由度。
[0069]
具体地,平衡杆210的中间位置与车架100在水平面内转动连接,且在竖向上滑动连接,四个摆臂300通过对应的连接杆220与平衡杆210连接,例如,右前摆臂311通过221与平衡杆210位于y轴正方向的一端连接,左前摆臂314通过224与平衡杆210位于y轴正方向的一端连接,右后摆臂312通过222与平衡杆210位于y轴反方向的一端连接,左后摆臂313通过223与平衡杆210位于y轴反方向的一端连接(连接处均设置为球铰连接)。
[0070]
此时,平衡杆210、四个连接杆220、四个摆臂300以及机架形成的空间闭链结构000的计算自由度有:
[0071][0072]
这里n是构件的数目,这里是10;g是关节数目,这里是14;fi是第i个关节的自由度数目,转动副为1,球副为3;μ是并联冗余约束(此时为零),得出图11所示的空间闭链结构000的计算自由度为6,6个自由度有四个为平衡杆210绕自身转轴旋转的局部自由度(平衡杆210两端各两个),因此,图11所示的空间闭链结构000的实际自由度为:m1=f-4=6-4=2。
[0073]
这种情况下,减震器400可以设置于平衡杆210和车架100之间(参考图11),或者减震器400设置于位于横向同一侧的摆臂300之间,例如右前摆臂311和右后摆臂312之间(此方案图中未示出),此时平衡杆210可以相对于车架100上下滑动和转动适应各摆臂300的运动,最少可以使用一个减震器400,既能够保持被动柔顺式全地形星球探测车的全部车轮500的附着能力,还能够降低车架100的震动,各摆臂300之间联动,能够取得较好的抗侧倾能力。
[0074]
可选地,为了进一步降低减震器400的使用量,所述空间闭链结构000的数量大于1时,所述空间闭链结构000之间通过所述减震器400连接。
[0075]
参考图1至图3,示例性地,所述减震器400包括抗扭机构410,所述抗扭机构410的一端的两端分别与不同所述空间闭链结构000的平衡杆210连接。抗扭机构410可以是扭簧。
[0076]
参考图4至图8,所述减震器400的两端分别与位于横向同一侧且属于不同所述空间闭链结构000的所述摆臂300连接。
[0077]
如此,多个空间闭链结构000可以共用减震器400,能够在节约减震器400的基础上,在一定程度上实现空间闭链结构000之间的传力,可靠性高。
[0078]
参考图12至图14,当独立的所述摆臂300的数量不为零时,每个独立的所述摆臂300分别通过一个所述减震器400位于横向同一侧的所述空间闭链结构000的所述摆臂300连接,其中,独立的所述摆臂300为没有连接所述连接杆220的所述摆臂300。
[0079]
如此,独立的摆臂300和空间闭链结构000之间可以共用减震器400,能够采用较少的减震器400实现减震需求。
[0080]
参考图12至图15,在上述实施例中,当减震器400的两端分别与两个所述摆臂300连接时,所述减震器400的两端分别与两个所述摆臂300转动连接。
[0081]
如此,即使当摆臂300摆动,减震器400与摆臂300之间存在夹角时,减震器400也能够取得较好地减震作用。
[0082]
参考图15,需要说明的是,减震器400可以包括减震弹簧420和减震阻尼器430,在经过不平路面时,减震弹簧420过滤路面的震动,但弹簧自身还会有往复运动,而减震阻尼
器430就是用来抑制这种弹簧跳跃,从而取得较好的减震效果。
[0083]
可选地,所述摆臂300包括呈夹角设置的第一杆段301和第二杆段302,其中,所述第一杆段301和所述第二杆段302的连接处与所述车架100转动连接,所述第二杆段302向上延伸设置,且用于与所述连接杆220连接。
[0084]
示例性地,第一杆段301和第二杆段302的夹角为钝角,车架100可以包括底架和顶架,底架用于与摆臂300和平衡杆210连接,顶架设置于底架的上方,且顶架和底架之间形成有用于容置平衡杆210以及连接杆220的容置部(此方案图中未示出),当摆臂300与车架100连接,且各车轮500自然附着于水平地面时,第二杆段302的延伸方向可以与竖直方向一致,第一杆段301的末端在被动柔顺式全地形星球探测车的前后方向远离被动柔顺式全地形星球探测车的中心设置,平衡杆210可以沿y轴方向延伸设置,其长度小于两个摆臂300与车架100连接位置之间的距离(例如定义同一侧该两个连接位置之间的距离为第一距离),则平衡杆210的长度为第一距离的1/4至2/3,例如2/5至3/5,例如1/2,在此,基础上平衡杆210不局限于细长件,例如也可以设置为多叉结构,各叉的中心位于平衡杆210的中心处,可以进一步降低其连接杆220的占用空间,此处不再详细说明。
[0085]
如此,能够在传递摆臂300之间的作用力的基础上,降低连接杆220运动所需要的空间,空间结构紧凑,可靠性高。
[0086]
可选地,车轮500选用弹性车轮。
[0087]
如此,可以通过弹性车轮在一定程度吸收或者说抑制俯仰、侧倾的高频振动,进一步提升被动柔顺式全地形星球探测车在崎岖地形运动的柔顺性和适应能力。但需说明的是,弹性车轮的弹性能力根据具体的试验需求确定,其不宜过软,此处不再详细说明。
[0088]
在本发明的可选实施例中,所述摆臂300的数量设置为至少四个,至少l1个所述摆臂300中包括位于对角的两个所述摆臂300,当其中一个所述摆臂300受到车轮500传递的来自地面的冲击时,位于对角的两个所述摆臂300上连接所述车轮500的一端用于相对于车架100在竖向上朝相同的方向运动(同时向上或同时向下运动);
[0089]
和/或,至少l1个所述摆臂300中包括横向上位于相对位置的两个所述摆臂300时,当其中一个所述摆臂300受到车轮500传递的来自地面的冲击时,横向上位于相对位置的两个所述摆臂300连接所述车轮500的一端用于相对于车架100在竖向上朝相反的方向运动(即一个向上运动,一个向下运动)。多个车轮500受到地面的冲击的情况在后文进行说明。
[0090]
以下结合几个具体实施例进行说明。
[0091]
【第一实施例】
[0092]
参考图1至图3,此时,具有两组平衡杆系200,两个平衡杆系200的平衡杆210之间通过抗扭机构410连接。此时,整个被动柔顺式全地形星球探测车的计算自由度有:
[0093][0094]
其中,n是构件的数目,这里是11;g是关节数目,这里是14;fi是第i个关节的自由度数目,转动副为1,球副为3;μ是并联冗余约束。整个悬架的计算自由度为6,其中四个是平衡杆210绕自身转轴旋转的局部自由度。因此,实际自由度为2,具体体现在两个平衡杆210均可以在水平面内转动。
[0095]
当平衡杆210所连接的摆臂300受到的地面的冲击力传递至平衡杆210,最终体现
为平衡杆210的转动。
[0096]
具体地,初始状态下,各车轮500附着于水平地面,抗扭机构410具有初始势能,当右后车轮512和/或左前车轮514受到来自地面的障碍物的冲击时,位于下方的一个平衡杆210顺时针转动,当右前车轮511和/或左后车轮513受到来自地面的障碍物的冲击时,位于上方的一个平衡杆210逆时针转动,也就是说,此时两个平衡杆210的转动方向相反,两个平衡杆210之间的抗扭机构410的势能增大,通过抗扭机构410可以在平衡杆210之间进行传力,对被动柔顺式全地形星球探测车进行减震。参考图3,以右后车轮512为例,当右后车轮512受到来自地面障碍物的冲击,右后摆臂312在yz平面内按照顺时针方向转动(即按照图中箭头方向转动,后续与此类似,不再详细说明),使得下方的平衡杆210在xz平面内按照顺时针方向转动,此时,在抗扭机构410的势能作用下,位于上方的平衡杆210在xy内按照顺时针方向转动(即按照图中箭头方向转动),右前摆臂311和左后摆臂313相对于车架100在yz平面内按照图示箭头方向转动,也就是说,车架100上与右前摆臂311、右后摆臂312、左后摆臂313的连接位置均具有相对于水平地面升高的趋势,而车架100上与左前摆臂314连接的位置具有相对于水平地面下降的趋势,从而相对于没有本发明的方案的情况(仅车架100与右后摆臂312的连接位置相对于水平地面升高)而言,能够在一定程度上降低车架100的俯仰侧倾幅度。当右前车轮511和右后车轮512同时受到地面的冲击时,两个平衡杆210反向转动,抗扭机构410工作,进行减震,车架100相对于水平地面的高度整体升高。另外,上下平衡杆210之间可以设置用于限制相对转动位置的限位机构,限制上下平衡杆210的相对摆动范围,避免抗扭机构410失效,抗扭机构410可以包括扭杆、扭簧等,此处不再详细说明。
[0097]
【第二实施例】
[0098]
参考图4至图8,本实施例中,同样具有两个平衡杆系200,减震器400设置于位于横向同一侧且属于不同所述空间闭链结构000的所述摆臂300之间,例如减震器400分别与左后摆臂313和左前摆臂314连接。此时,减震器400可以包括减震弹簧420和减震阻尼器430。
[0099]
此时,整个被动柔顺式全地形星球探测车的计算自由度有(计算时不考虑减震器400):
[0100][0101]
类似于上述第一实施例,实际自由度为2。
[0102]
参考图5,若将减震器400等效为直线副,则整个被动柔顺式全地形星球探测车的计算自由度有:
[0103][0104]
其中,n是构件的数目,这里是15;g是关节数目,这里是20;fi是第i个关节的自由度数目,转动副为1,球副为3;μ是并联冗余约束,此时含有两个平面闭链(横向两端的摆臂300形成),则为6,最终计算自由度为6,其中四个是平衡杆210绕自身轴旋转的局部自由度,实际自由度为2。
[0105]
其工作方式与上述第一实施例的工作方式类似,此处不再详细说明。
[0106]
【第三实施例】
[0107]
参考图9至图11,平衡杆210通过连接杆220与四个摆臂300连接,平衡杆210、四个
连接杆220、四个摆臂300以及机架形成空间闭链结构000,被动柔顺式全地形星球探测车的自由度与空间闭链结构000的自由度一致,前文已经计算得出,因此,被动柔顺式全地形星球探测车的实际自由度为2。当平衡杆210按照图示方向转动时,各摆臂300按照对应的方向摆动,此处不再详细说明,通过减震器400对平衡杆210的向下运动进行减震,从而实现对整个被动柔顺式全地形星球探测车的减震。当右前车轮511和右后车轮512同时受到地面的冲击时,平衡杆210在上下方向运动,减震器400的减震弹簧的弹性势能增大,进行减震,车架100相对于水平地面的高度整体升高。
[0108]
【第四实施例】
[0109]
参考图12至图15,此时,右后摆臂312和左前摆臂314这两个独立的摆臂300分别通过减震器400与空间闭链结构000的摆臂300连。被动柔顺式全地形星球探测车的计算自由度有:
[0110][0111]
其中,n是构件的数目,这里是8;g是关节数目,这里是9;fi是第i个关节的自由度数目,转动副为1,球副为3;μ是并联冗余约束。最终计算结果为5,其中2个是平衡杆210绕自身轴旋转的局部自由度。因此,实际自由度为3。其中一个自由度代表平衡杆210的转动自由度,另两个自由度为右后摆臂312和左前摆臂314这两个独立的摆臂300的摆动自由度。
[0112]
此时,参考图14,当右后摆臂312按照图示方向转动时,通过平衡杆210传递至左前摆臂314,在两个减震器400的作用下,右前摆臂311和左后摆臂313各自具有按照图示方向转动的趋势,从而取得与上述第一实施例相似的效果。
[0113]
根据上述四个实施例总结减震器400需求数量的最小值的规律:减震器400需求数量的最小值=各空间闭链结构000的实际自由度之和+独立的摆臂300的数量-1。
[0114]
其中,每个减震器400用于限制空间闭链结构000和/或独立的摆臂300的一个自由度上的运动,为提供稳定性,可以多个减震器400共同起到限制一个自由度的作用,例如图7所示两个减震器400的情况可以仅采用图8所示一个减震器400,同样能够满足使用需求。
[0115]
虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员,在不脱离本公开的精神和范围的前提下,可进行各种变动与修改,这些变动与修改均将落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1