一种模块化可重构飞行器
1.本发明涉及一种模块化可重构飞行器,属于飞行器领域。
背景技术:
2.无人机是迄今为止品种最复杂、应用领域最广的飞行器,在构型、用途、尺寸、飞行高度、飞行速度等方面有很大差异。固定翼无人机具有续航时间长、飞行速度快、载重能力强等优点,但是无法悬停,且容易收到阵风气流的影响。无人直升机具有可悬停、力效高等特点,但结构复杂、振动和噪声较大,使用成本高。旋翼类微型无人机具有体积小、可垂直起降、超低速飞行等特点,但负载低和续航时间短限制了其发展。
3.由于传统无人机,或是无法悬停,或是成本较高,或是载重能力较低,在一些复杂的环境和地形中,无法胜任多种作业任务。因此,有必要研究能适应不同地形、不同环境的拓扑新构型无人机。
技术实现要素:
4.本发明提供了一种模块化可重构飞行器,将模块化的飞行单元模块通过巧妙的连接构建了可重构飞行器。
5.本发明的技术方案是:一种模块化可重构飞行器,包括飞行单元模块1、机械连接结构3;相邻飞行单元模块1之间通过机械连接结构3相连。
6.可选地,在多个飞行单元模块1的中间位置通过机械连接结构3固定安装功能模块2;其中,飞行单元模块1的数量为不少于4个的偶数个。
7.可选地,所述飞行单元模块1包括主面板4,主面板4正中间设有固定直流电机11的直流电机固定件10且直流电机固定件10与主面板4连接,直流电机11轴端安装有螺旋桨7。
8.可选地,所述主面板4包括板体,板体内圈呈圆形,板体外圈主体呈六边形设计,六边形通过六条主边依次连接,对六条主边连接形成的六个角进行截角处理形成六条副边,板体上设有减重凹槽。
9.可选地,所述直流电机固定件10包括外框架、位于外框架中呈上下布置的上层板15和下层板16;其中,上层板15固定安装直流电机11,下层板16安装飞控板17和电调18;在外框架外表面每间隔120
°
安装一组铰支座ⅰ9,每组铰支座ⅰ9包括呈上下布置的两个铰支座ⅰ9。
10.可选地,所述铰支座ⅰ9上通过铰链连接的形式安装有轴套12,轴套12固定连接碳纤维杆8的一端;所述碳纤维杆8另一端同样固定连接有轴套12,碳纤维杆8另一端安装的轴套12与安装在主面板4上的铰支座ⅱ13连接,形成铰链连接结构。
11.可选地,一组铰支座ⅰ9上安装的轴套12中心之间的距离大于一组铰支座ⅱ13上安装的轴套12中心之间的距离;其中,主面板4上每间隔120
°
安装一组铰支座ⅱ13,一组铰支座ⅱ13包括呈上下布置的两个铰支座ⅱ13。
12.可选地,所述机械连接结构3包括l形连接块ⅰ5和l形连接块ⅱ6,且l形连接块ⅰ5和
l形连接块ⅱ6依次交替布置在飞行单元模块1的主面板4上;相邻飞行单元模块1中第一个飞行单元模块1的l形连接块ⅰ5与第二个飞行单元模块1的l形连接块ⅱ6连接,第一个飞行单元模块1的l形连接块ⅱ6与第二个飞行单元模块1的l形连接块ⅰ5连接。
13.可选地,所述l形连接块ⅰ5一侧固定安装轴套ⅱ22,l形连接块ⅱ6一侧固定安装有轴套ⅰ20,螺栓23穿过轴套ⅱ22、l形连接块ⅰ5和l形连接块ⅱ6配合的面、轴套ⅰ20与螺帽19螺纹连接。
14.可选地,所述l形连接块ⅰ5和l形连接块ⅱ6配合的面、轴套ⅰ20及轴套ⅱ22的轴向都设有贯穿的条形孔21,轴套ⅱ22远离轴套ⅰ20的一侧设有与条形孔呈夹角的凹槽;所述螺栓23远离螺帽19一侧设有一字型挡块24,条形孔21用于带一字型挡块24的螺栓23穿过。
15.本发明的有益效果是:
16.1、本发明使用可快拆的机械连接结构,实现多个飞行单元模块和功能模块之间的快速分离和组装;可实现由不低于4个的偶数个飞行单元模块组成的多种构型飞行器飞行,以适应复杂环境下的多种飞行任务;
17.2、飞行单元模块中碳纤维杆的安装类似于雨伞骨架形状的设计,提高了整体结构强度和减缓了螺旋桨转动带来的抖动问题;
18.3、通过携带如视觉模块、能源模块和通信模块等功能模块,可实现侦查、多目标跟踪、提高续航时间和恢复局部地区通信等多种功能的拓展。
附图说明
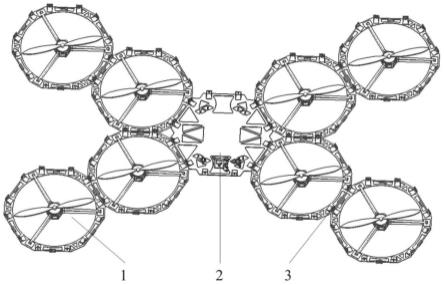
19.图1为本发明的整体示意图;
20.图2为本发明的不同构型飞行器示意图;
21.图3为本发明的飞行单元模块示意图;
22.图4为本发明的直流电机固定件示意图;
23.图5为本发明的机械连接结构装配示意图;
24.图6为本发明的机械连接结构爆炸示意图;
25.图7为本发明的功能模块示意图;
26.图8为本发明减震球、电机ⅰ的装配图;
27.图9为不同外形飞行单元模块平铺效果图;
28.图10为主面板轻量化前后对比图;
29.图中各标号为:1-飞行单元模块、2-功能模块、3-机械连接结构、4-主面板、5-l形连接块ⅰ、6-l形连接块ⅱ、7-螺旋桨、8-碳纤维杆、9-铰支座ⅰ、10-直流电机固定件、11-直流电机、12-轴套、13-铰支座ⅱ、14-通信接口、15-上层板、16-下层板、17-飞控板、18-电调、19-螺帽、20-轴套ⅰ、21-条形孔、22-轴套ⅱ、23-螺栓、24-一字型挡块、25-面板、26-减震球、27-相机、28-电机ⅲ、29-电机ⅱ、30-电机ⅰ、31-相机云台。
具体实施方式
30.下面结合附图和实施例,对发明做进一步的说明,但本发明的内容并不限于所述范围。
31.如图1-10所示,一种模块化可重构飞行器,包括飞行单元模块1、机械连接结构3;
相邻飞行单元模块1之间通过机械连接结构3相连。即可根据不同飞行任务,组装成最优构型的飞行器。
32.可选地,在多个飞行单元模块1的中间位置通过机械连接结构3固定安装功能模块2;其中,飞行单元模块1的数量为不少于4个的偶数个。通过在多个飞行单元模块1的中间位置安装功能模块2,可以进一步拓展飞行器的功能。
33.可选地,所述飞行单元模块1包括主面板4,主面板4正中间设有固定直流电机11的直流电机固定件10且直流电机固定件10与主面板4连接,直流电机11轴端安装有螺旋桨7。
34.可选地,所述主面板4包括板体,板体内圈呈圆形,板体外圈主体呈六边形设计,六边形通过六条主边依次连接,对六条主边连接形成的六个角进行截角处理形成六条副边,板体上设有减重凹槽。
35.具体而言,如图1-3所示,整个主面板在正六边形结构基础上经过拓扑轻量化设计而成,即在正六边形的基础上,对六个角进行截角处理形成六条副边,使主边与主边之间通过副边连接,副边短于长边;通过轻量化设计,使得结构更轻,更利于飞行器飞行;再者,通过在正六边形结构基础上经过拓扑轻量化设计而成的飞行单元模块、功能模块,和三角形、圆形、四边形、五边形等不同形状对比,具有较好的平铺效果以及材料利用率较高的特点(如图9所示,展示了不同形状的平铺效果,当相邻飞行单元模块1之间通过机械连接结构3相连构成模块化飞行器时,六边形构型在支持各种变形的同时具有较好的平铺效果,从分析螺旋桨转动轨迹圆可知,在获得较好的平铺效果时,本发明的拓扑布局材料利用率较高)。再进一步地,所述主边的边缘都安装有通信接口14,以实现多个飞行单元模块1中飞控板17间的相互通信。所述螺旋桨7分为正桨和反桨,每个飞行单元模块1上配有一个正桨或一个反桨。其中,飞行单元模块1的数量为不少于4个的偶数个,即整个模块化可重构飞行器中正反桨的数量相同,可以避免奇数个螺旋桨会带来空气扭力矩不平衡的问题,从而保证飞行器正常飞行。
36.示例性的,本发明给出主面板4的轻量化结果:主面板4采用强度高、质量轻的碳纤维材料进行加工,采用拓扑优化技术进行轻量化设计,优化后的质量降低了40%(如经实验,主面板4采用碳纤维材料进行加工,且主面板4中平行边之间的距离设置为1米,厚度设置为6毫米。通过采用拓扑优化技术进行轻量化设计,优化后的质量由原来的2.23kg降低至1.34kg,降低了40%)。如图10展示了飞行单元模块轻量化前后对比效果图。
37.可选地,所述直流电机固定件10包括外框架(框架外轮廓近似设计为六棱柱形)、位于外框架中呈上下布置的上层板15和下层板16;其中,上层板15固定安装直流电机11,下层板16安装飞控板17和电调18;在外框架外表面每间隔120
°
安装一组铰支座ⅰ9,每组铰支座ⅰ9包括呈上下布置的两个铰支座ⅰ9。
38.可选地,所述铰支座ⅰ9上通过铰链连接的形式安装有轴套12,轴套12固定连接碳纤维杆8的一端;所述碳纤维杆8另一端同样固定连接有轴套12,碳纤维杆8另一端安装的轴套12与安装在主面板4上的铰支座ⅱ13连接,形成铰链连接结构。
39.可选地,一组铰支座ⅰ9上安装的轴套12中心之间的距离大于一组铰支座ⅱ13上安装的轴套12中心之间的距离;其中,主面板4上每间隔120
°
安装一组铰支座ⅱ13,一组铰支座ⅱ13包括呈上下布置的两个铰支座ⅱ13。如图1-3所示,三组铰支座ⅱ13安装在主面板的三个副边与内圈形成的板体上部和下部,三组铰支座ⅰ9的位置对应。通过该设计,与每组铰
支座ⅰ9连接的呈上下布置的两根碳纤维杆8一端之间的距离大于两根碳纤维杆8另一端之间的距离,使碳纤维杆8倾斜一定角度,从而可以有效改善飞行器飞行过程中应力主要集中在铰支座ⅰ9和铰支座ⅱ13处的现象,提高飞行器结构的稳定性。如图1-4所示,主体呈六边形设计的飞行单元模块中设有三组碳纤维杆,每组由两根碳纤维杆构成,六根碳纤维杆的安装类似于雨伞骨架形状的设计,提高了整体结构强度和减缓了螺旋桨转动带来的抖动问题;再者,碳纤维杆的组数是主面板主边数量的一半,在满足有效飞行的同时,还具备如下优势:一方面是减重,另一方面可以减少螺旋桨下方遮挡物,从而降低对飞行器升力的影响。
40.可选地,所述机械连接结构3包括l形连接块ⅰ5和l形连接块ⅱ6,且l形连接块ⅰ5和l形连接块ⅱ6依次交替布置在飞行单元模块1的主面板4上;相邻飞行单元模块1中第一个飞行单元模块1的l形连接块ⅰ5与第二个飞行单元模块1的l形连接块ⅱ6连接,第一个飞行单元模块1的l形连接块ⅱ6与第二个飞行单元模块1的l形连接块ⅰ5连接。
41.可选地,所述l形连接块ⅰ5一侧固定安装轴套ⅱ22,l形连接块ⅱ6一侧固定安装有轴套ⅰ20,螺栓23穿过轴套ⅱ22、l形连接块ⅰ5和l形连接块ⅱ6配合的面、轴套ⅰ20与螺帽19螺纹连接。
42.可选地,所述l形连接块ⅰ5和l形连接块ⅱ6配合的面、轴套ⅰ20及轴套ⅱ22的轴向都设有贯穿的条形孔21,轴套ⅱ22远离轴套ⅰ20的一侧设有与条形孔呈夹角的凹槽;所述螺栓23远离螺帽19一侧设有一字型挡块24,条形孔21用于带一字型挡块24的螺栓23穿过。
43.具体而言,如图5、6所示,l形连接块ⅱ6竖直板左侧固定安装有轴套ⅰ20,轴套ⅰ20左侧设有螺帽19;所述l形连接块ⅰ5竖直板右侧固定安装有轴套ⅱ22,且l形连接块ⅰ5和l形连接块ⅱ6的配合的面、轴套ⅰ20及轴套ⅱ22的轴向都设有贯穿的条形孔21;所述轴套ⅱ22远离轴套ⅰ20的一侧设有与条形孔呈夹角的凹槽,如图中所示,凹槽与条形孔呈90
°
分布。螺栓23右端固定连接一字型挡块24,且允许带一字型挡块24的螺栓23未与螺帽19脱离时,可通过条形孔21向左移动,使机械连接结构分离,从而解除多个飞行单元模块1或功能模块2间的连接;允许一字型挡块24与轴套ⅱ22上的凹槽配合时,通过拧紧螺帽19的方式,使得一字型挡块24嵌套在轴套ⅱ22右端面的水平方向长方形凹槽内,从而使多个飞行单元模块1固定连接(如果存在部件功能模块2,也同样用于飞行单元模块1与功能模块固定连接)。通过该设计,不仅可以用于螺栓23与螺帽19脱离状态下实现多个飞行单元模块1的组装,同时可以用于螺栓23未与螺帽19脱离时实现多个飞行单元模块1的组装(如果存在部件功能模块2,也同样可以用于飞行单元模块1与功能模块的组装),更进一步地,在螺栓23未与螺帽19脱离状态下进行组装时,可以减少螺栓23与螺帽19的配对时间。值得注意的是,由于主面板4每条主边的边缘安装的l形连接块ⅰ5和l形连接块ⅱ6呈中心对称,使得多个飞行单元模块1或功能模块2通过任意排列组合连接在一起,避免相邻模块六边形不同面之间需要通过配对的方式连接。
44.需要说明的是,所述功能模块2包括视觉模块、能源模块以及通信模块等不同功能的模块,这里以带有相机的视觉模块为例进行描述。如图7-图8所示,功能模块2包含经过轻量化处理的面板25,面板25外型轮廓近似为六边形,尺寸和飞行单元模块1上的主面板4大小适配,六边形每条边的边缘同样基于中心对称安装有l形连接块ⅰ5和l形连接块ⅱ6;面板25下方安装有相机云台31。
45.可选地,所述相机云台31上端设有8个减震球26,减震球26下方连接电机ⅰ30,在相机云台31内部分别安装电机ⅱ29和电机ⅲ28,电机ⅲ28轴端固定安装相机27,三个电机可实现相机27多角度拍摄。
46.以图中所示结构,对本发明的工作过程描述如下:
47.根据当前飞行任务,选择相同数量的安装有正螺旋桨或反螺旋桨的飞行单元模块1,同时可根据任务需求选取功能模块,接着利用机械连接结构3,对选取的飞行单元模块和功能模块进行快速拼接,组合成特定构型的飞行器。机械连接结构采用改进的螺栓连接方式,在进行相邻模块组装时,将一端带一字挡版24的螺栓23竖直穿过l形连接块ⅱ6和轴套ⅱ22上的条形孔21,然后顺时针转动90
°
,再拧紧螺帽19,使一字型挡块24成功嵌套在轴套ⅱ22内部,完成机械连接结构的装配过程,最后根据当前的飞行器构型,利用飞控板17完成飞行器的稳定飞行;分离时则先将螺帽19拧松,将一字型挡块24向外侧推出一定距离,然后逆时针旋转90
°
后,从条形孔21中间抽出。组装完成后,利用通信接口14,实现飞行单元模块1上的飞控板17之间的通信,最后通过主飞控板17实现飞行器的稳定控制(飞行器采用分布式控制的方式,每个飞行器上都安装有一个飞控板。在控制飞行器飞行时,需先指定其中一个飞控板作为主飞控板,然后由主飞控板发送力矩分配指令给其他飞控板,最后,所有飞控板通过解算力矩分配指令输出控制信号,从而控制螺旋桨的转速)。安装有功能模块的模块化可重构飞行器,可实现特定的功能。如视觉模块,通过模块上的相机模块,实现空中侦察任务或目标跟踪任务;通过增加能源模块,延长飞行器的续航时间;载有通信模块的飞行器,可实现灾后地区或者偏远山区的短时间通信。
48.上面结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1