以无人机为载体的抗剪强度检测器发射装置
1.本发明涉及发射器技术领域,特别涉及一种可预测泥石流的以无人机为载体的抗剪强度检测器发射装置。
背景技术:
2.土壤含水量越大,粘聚力值越小,土壤越分散,密度就越小;抗剪强度参数值与含水量呈线性关系,即含水量越高,土壤抗剪强度越低,外部固体容易破坏山体表面并进入山体表层,即外部固体可深入的深度越大。
3.泥石流发生之前,往往会经历高强度的下雨,雨水渗入山体,使山体土壤含水量增加,从而导致土壤粘聚力值变小,土壤密度变小,造成泥石流、山体滑坡等灾害;而凭借目前的技术,难以很好的预判泥石流是否发生。
技术实现要素:
4.本发明的目的在于解决泥石流发生可预测性低的问题,提供了一种可预测泥石流的以无人机为载体的抗剪强度检测器发射装置。
5.本发明解决上述技术问题采用的技术方案是:本发明用于泥石流的预测,包括四旋翼飞行装置,履带装置,抗剪强度检测器发射装置;在履带装置上配置有四旋翼飞行装置,单侧的履带装置配置有抗剪强度检测器发射装置。
6.所述抗剪强度检测器发射装置包括上阀门,下阀门,内防卡管,外防卡管,摄像头,带有刻度的绳尺,飞镖,细绳索,弹簧,棘轮和棘爪;所述上阀门与下阀门安装在抗剪强度检测器发射装置的出口处,连接方式为铰连接,且转动角度为九十度;处于最大角度时,上阀门和下阀门分别与抗剪强度检测器发射装置的上下表面平行,即处于打开状态;处于最小角度时,上阀门与下阀门分别与抗剪强度检测器发射装置的上下表面垂直,即处于闭合状态;所述摄像头安装在上阀门的外表面,当上阀门呈最大角度时,摄像头正对前方,在抗剪强度检测器发射装置作业过程中,拍摄带有刻度的绳尺上的刻度;所述外防卡管与下阀门连接,在下阀门开启呈最大角度时,外防卡管用于防止在飞镖收回过程中被外阀门卡住;所述内防卡管安装在抗剪强度检测器发射装置内部中央横板上,内防卡管用于防止在飞镖收回过程中被意外卡住;所述的内防卡管由一段圆柱体与一段弧面组成,弧面的一端连接在圆柱体上,另一端悬空;所述弹簧安装在内防卡管的圆柱体内部,弹簧末端与横板外表面相连接,为飞镖射出提供弹力;所述飞镖、带有刻度的绳尺、细绳索按顺序相连接,其中,飞镖放置于内防卡管的
圆柱体部分,细绳索通过横板上的孔洞连接到滚轴,并缠绕在滚轴上;飞镖用于带动绳尺向外射出,并射入土壤保持固定,绳尺用于显示射入的深度;所述滚轴安装在抗剪强度检测器发射装置的最内侧,所述棘轮安装在滚轴的两端,滚轴与棘轮为同心关系,滚轴和棘轮所构成的组合体用于对细绳索的回收、缠绕;所述棘爪安装在相对于滚轴、棘轮组合体的偏上位置,棘爪尖端可正好卡入棘轮的任意两尖端之间的空隙内,棘爪与抗剪强度检测器发射装置内壁的连接方式为铰连接。
7.进一步说,所述外防卡管为半圆弧形面,当处于闭合状态时,所述的外防卡管刚好与位于两个上阀门之间。
8.进一步说,滚轴与棘轮所构成的组合体与抗剪强度检测器发射装置内壁的连接方式为铰连接,组合体可转动。
9.进一步说,还包括转动副,所述转动副安装在抗剪强度检测器发射装置的两侧外表面,用于调整抗剪强度检测器发射装置的发射角度。
10.进一步说,所述的四旋翼飞行装置相对于履带装置的角度可调节,以便适应履带装置爬坡时,所述的四旋翼飞行装置仍旧能保持水平状态。
11.本发明具有的有益效果是:抗剪强度检测器发射装置能够在单片机控制板的控制下以固定初速度发射钻头,并通过射入土壤深度来检测土壤抗剪强度,包括对不同土质山体进行检测。
附图说明
12.图1是本发明的结构示意图。
13.图2是图1的侧视图。
14.图3是图2中i部分放大图。
15.图4是本发明正面剖视图。
16.图5 是抗剪强度检测器发射装置呈闭合状态时的结构示意图。
17.图6是抗剪强度检测器发射装置呈打开状态时的结构示意图。
18.图7 是抗剪强度检测器发射装置的侧面剖视图。
19.图8 是图7部分的局部放大图。
20.图9 是内防卡管放大图。
21.图10是抗剪强度检测器发射装置向下旋转45度的结构示意图。
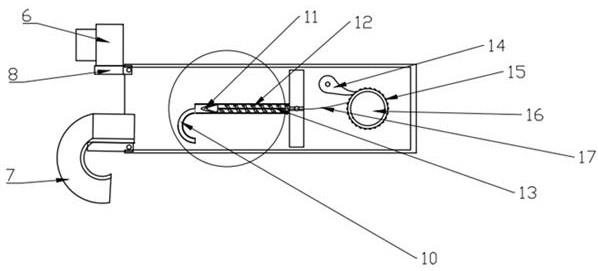
22.图11是抗剪强度检测器发射装置发射飞镖时的结构图。
23.图12是抗剪强度检测器发射装置发射飞镖时的侧视剖面图。
24.图中:1、四旋翼飞行装置,2、电机,3、单片机控制板, 4、履带装置,5、抗剪强度检测器发射装置,6、摄像头,7、外防卡管,8、上阀门,9、下阀门,10、内防卡管11、飞镖,12、弹簧,13、带有刻度的绳尺,14、棘爪,15、棘轮,16、滚轴,17、细绳索,18、转动副。
具体实施方式
25.为了能够更加清楚地理解本发明的上述目的、特征和优点,下面结合附图及实施例对本发明做进一步说明。
26.如图1、图2、图3和图4所示,以无人机为载体的抗剪强度检测器发射装置,用来可
预测泥石流,该装置包括四旋翼飞行装置1,履带装置4和抗剪强度检测器发射装置5。四旋翼飞行装置,履带装置,抗剪强度检测器发射装置;在履带装置上配置有四旋翼飞行装置,单侧的履带装置配置有抗剪强度检测器发射装置。
27.所述抗剪强度检测器发射装置包括上阀门8,下阀门9,内防卡管10,外防卡管7,摄像头6,带有刻度的绳尺13,飞镖11,细绳索17,弹簧12,棘轮15,棘爪14,滚轴16和转动副18。
28.所述上阀门与下阀门安装在抗剪强度检测器发射装置的出口处,连接方式为铰连接,且转动角度为九十度;处于最大角度时,上阀门和下阀门分别与与抗剪强度检测器发射装置的上下表面平行,即处于打开状态,如图7和图12所示。处于最小角度时,上阀门与下阀门分别与抗剪强度检测器发射装置的上下表面垂直,即处于闭合状态,如图5所示。在抗剪强度检测器发射装置作业过程中,起着改变装置出口开启、闭合状态的作用。
29.所述摄像头安装在上阀门的外表面,与上阀门为平行关系,当上阀门呈最大角度时,摄像头正对前方,在抗剪强度检测器发射装置作业过程中,拍摄带有刻度的绳尺上的刻度。所述外防卡管与下阀门连接,在下阀门开启呈最大角度时,外防卡管所呈现的形态可以防止在飞镖收回过程中被外阀门卡住。如图5所示,该实施例中的所述外防卡管为半圆弧形面,当处于闭合状态时,所述的外防卡管刚好与位于两个上阀门之间。所述内防卡管安装在抗剪强度检测器发射装置内部的横板中央,所述的内防卡管由一段圆柱体与一段弧面组成,弧面的一端连接在圆柱体上,另一端悬空;内防卡管的圆柱体部分的底面与横板外表面相接,该段弧面能够防止在飞镖收回过程当中被意外卡住。所述弹簧安装在内防卡管圆柱体部分的内部,弹簧末端与横板外表面相连接,其主要作用是为飞镖射出提供弹力。
30.所述飞镖、带有刻度的绳尺、细绳索按照所述顺序相连接,其中,飞镖放置于内防卡管的圆柱体部分,细绳索通过横板中央的孔洞连接到滚轴,并缠绕在滚轴上。飞镖的主要作用是带动带有刻度的绳尺向外射出,并射入土壤保持固定,由于飞镖需要经常射入土壤,易遭受腐蚀,因此,飞镖表面的材质主要为sus321或sus316,飞镖的内部用密度较大的金属填充,如铜,铅。带有刻度的绳尺的主要作用是当飞镖射入土壤中并固定时,可显示射入的深度;细绳索的作用是与滚轴相配合将飞镖与带有刻度的绳尺的回收,见图8和图9。
31.所述滚轴安装在抗剪强度检测器发射装置的最内侧,所述棘轮安装在滚轴的两端,滚轴与棘轮为同心关系,该滚轴、棘轮组合体与抗剪强度检测器发射装置内壁的连接方式为铰连接,组合体可转动,该组合体主要用于对细绳索的回收、缠绕。所述棘爪安装在相对于滚轴、棘轮组合体的偏上位置,棘爪尖端可正好卡入棘轮的任意两尖端之间的空隙内,棘爪与抗剪强度检测器发射装置内壁的连接方式为铰连接,其主要作用时在滚轴、棘轮组合体回收细绳索,并且弹簧被压缩到最大程度时,卡住棘轮,使滚轴、棘轮组合体无法转动,在飞镖要发射时,瞬间弹开,使棘轮、滚轴组合体恢复转动,让飞镖成功射出。所述转动副安装在抗剪强度检测器发射装置的两侧外表面,其主要作用是控制抗剪强度检测器发射装置进行转动,进而改变发射角度。
32.所述四旋翼飞行装置为履带无人机四旋翼飞行部分,包括机架、机翼等,主要执行履带无人机的飞行任务。
33.所述履带装置包括履带、传动杆、齿轮。主要执行履带无人机地面行进任务。
34.其中所述的四旋翼飞行装置相对于履带装置的角度可调节,以便适应履带装置爬坡时,所述的四旋翼飞行装置仍旧能保持水平状态。
35.单依靠履带装置爬坡存在效率低的问题,不便于完成所执行的任务。单依靠四旋翼飞行装置爬坡存在受环境影响大、能耗高的问题,局限无人机工作范围。本发明将履带装置与四旋翼飞行装置结合在一起,可以克服上述技术问题。
36.所述棘爪由单片机控制板3控制,根据滚轴旋紧情况,对棘轮进行卡住和松放。所述单片机控制板用来加装所需电子元器件,包括单片机,开关,电源接口等。
37.所述抗剪强度检测器发射装置在无人机两端都有加装,主要为了保持无人机平衡以及在其中一个抗剪强度检测器发射装置发生故障时可使用另外一个。
38.本发明的工作过程:由用户操作无人机抵达指定位置,控制上阀门8转动至合适位置,由摄像头6测量山坡的坡面角度,测量完毕后,将上阀门8向上旋转至最大角度九十度,下阀门9向下旋转九十度,使上下阀门与抗剪强度检测器发射装置上下表面呈水平关系,如图6所示,此时抗剪强度检测器发射装置为打开状态。
39.由用户控制抗剪强度检测器发射装置旋转至与发射装置与坡面呈45度或135度关系,如图10所示。此时棘爪14与棘轮15为未接触关系。滚轴16、棘轮15共同体开始旋转,带动细绳索17缠绕在滚轴16上,带有刻度的绳尺13和飞镖11在细绳索17的拖动下逐渐通过内防卡轮10的圆柱体部分向抗剪强度检测器发射装置内部的横板靠近。随着细绳索17被缠绕的长度越来越长,细绳索17逐渐带动飞镖11压缩弹簧12,当弹簧12被完全压缩时,棘爪14向下转动卡住棘轮15,此时装置已处于待发射状态。
40.当该装置接收到发射命令时,棘爪14瞬间向上弹起,飞镖11在弹簧12弹力的作用下被发射出去,发射出去的状态如图11所示。当飞镖11成功射入土壤时,摄像头6开始拍摄带有刻度的绳尺13与土壤表面的交点位置所对应的读数,若拍摄角度不佳,可由用户控制上阀门8进行适当转动从而寻找到合适的角度进行拍摄,将拍摄的照片传回客户端。
41.完成拍摄时,滚轴16开始转动缠绕细绳索17收回飞镖11和带有刻度的绳尺13,在回收过程当中,当飞镖11接触到弹簧12时,滚轴16便可结束转动,该做法主要是为了减少弹簧12的损耗,从而延长其寿命。结束回收后,上阀门8和下阀门9闭合,结束作业。
42.由于不同土质的山体抗剪强度存在一定差异,在实际应用中需按上述步骤对不同土质的山体进行多次测量得出正常值,再由对疑似会发生泥石流的山体所测量的数值与正常数值进行比对,判断该山体是否会发生泥石流。
43.显然,本发明具体实现并不受上述方式的限制。只要是采用了本发明的方法构思和技术方案进行的各种非实质性的改进;或未经改进,将本发明的上述构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1