一种空中飞行的仿生机械
1.本发明涉及仿生机械领域,具体涉及一种空中飞行的仿生机械。
背景技术:
2.自古以来,人类就积极发挥主观能动性,从周边事物中取得奇思妙想,寻求灵感,借助科技的力量设计出新型仿生设备。生物界一直处于适者生存、不适者被淘汰的环境当中,许多生物在玩千年的历史变迁当中,为了更好地适应周边环境,在地球上生存下去,努力去作出改变,以此实现绵延与繁殖。人类是大自然界的重要组成部分,既接受着自然的馈赠,也应当承担起自己的责任,需要与万千生物和谐相处。但在此过程中,人类还应注重对周边事物的观察与模仿,利用自己的智慧、借助外部的力量创造出促使我们更好生存与发展的工具,从而在瞬息万变的自然环境中延绵至今。
3.仿生设计能够为我们带来丰富多彩、稀奇古怪的美感,这一种美感是大自然给予人类的馈赠,对此我们应满怀感恩之心,将其应用于对社会、对自然有意义的方面。仿生设计是将大自然当中的万千事物当作灵感,从它们所特有的外部条件、身体构造、基本技能中寻得新的知识,从而方便我们更好地生活。除此之外,仿生设计由来历史已久,它通过仿生方法,设计出新型的产品,这在一定程度上丰富了自然界事物的种类,并且伴随着时代的进步,设计程序更为科学,仿生设计发展为社会进步的重要组成部分。作为一种认识外部世界、抽象模拟外部事物的重要手段,仿生设计作为全新的设计方法,在将来势必大有可为。它将自然界的基本特征有机合成,并且把从自然界提取出来的元素选择性放在产品设计当中,其重要功能是增加产品的趣味性、情感性以及交互性,同时附加给产品更加自然的意义,让产品甚至机械不再那么冰冷。
4.申请号为202111074331.6的一种仿生水母机器人及其海洋探索应用方法的发明专利,包括电子舱、摆臂和第一拉杆;若干个所述摆臂环向铰接设置在所述电子舱的底部边缘处;所电子舱底部设置有伸缩部件;所述第一拉杆一端与伸缩部件的活动端铰接,另一端与摆臂表面铰接;往复活动的所述伸缩部件通过第一拉杆带动摆臂摆动;所述电子舱底部设置推进装置,所述推进装置套设于缩部件外侧;所述电子舱内活动设置有质量块。此发明通过重心偏离实现多个自由度的运动,模拟水母运动的方式,摆臂摆动是由电机带动第一拉杆拉动的,动力只通过第一拉杆输出,在结构上运用简单,无法使得摆臂摆动得更柔美、更具有灵动性,使得该机器人在水中还能利用水的浮力让摆臂运动,远离水中后,摆臂的摆幅就更僵硬,对于反向动力输入给电子舱就不如在水中来的明显。并且,改设计使用急回机构,在运动的过程中会出现卡顿的现象,使得仿生水下推进器运动不流畅,更由于水下环境复杂,水的阻力较大,会产生不必要的无用功出现。
5.专利号为zl201821600799.8的仿生水母机器人,可通过触手的摆动在水中浮沉、运动。轻巧灵活、低功耗、低成本、静音。其包括动力控制系统、推进系统;其中动力控制系统提动力和控制,推进系统采用多触手共面圆周布置,通过触手的摆动完成机器人的运动。它的多触手是依靠电机带动上下两个方位的凸轮连杆,再通过凸轮连杆带动与多触手铰接的
三级连杆摆动,从而让多触手活动起来,上下摆动而拨动水,依靠水的浮力模仿水母动起来,此结构设计比较复杂,增加了机器人自身重量,而且离开了水就没法飞行起来,只能在固定地方摆动多触手。
6.以上对比文件的仿生机械都只能在水中运动,远离水后都无法飞行,并且摆臂结构或复杂增加了自重,或僵硬,无法使得触手优美灵活的摆动。
技术实现要素:
7.为解决上述技术问题,本发明的目的在于提供一种空中飞行的仿生机械,仿制水母的游动规律制造出该仿生机械,具有运行效率高、操作便捷的特点,将机械与自然结合起来,让冰冷的机械结构鲜活起来。
8.为了实现上述目的,本发明的技术方案如下:
9.一种空中飞行的仿生机械,包括摆臂,以及气囊球、摆臂固定圈和摆臂支架结构,所述摆臂固定圈套在气囊球外周,所述摆臂上端以气囊球为中心固定在摆臂固定圈上,并环绕一圈,摆臂的下端悬空,摆臂支架结构固定在气囊球与摆臂之间用于拉动摆臂做上下摆动的往复运动,
10.所述摆臂支架结构包括驱动电机、行星主齿轮、行星副齿轮ⅰ、齿轮套、第一拉杆、第二拉杆、第三拉杆和竖支撑杆,所述行星主齿轮安装在驱动电机的输出轴上,齿轮套套在行星主齿轮外,在齿轮套的侧壁设有拉杆孔,
11.第一拉杆的其中一端穿过拉杆孔深入齿轮套内部,行星副齿轮ⅰ套在第一拉杆处于齿轮套内的端头并与行星主齿轮啮合,第一拉杆的另一端向着气囊球的径向方向延伸,在远离齿轮套的第一拉杆端头还安装有转接头,第一拉杆穿过转接头的左端部安装有行星副齿轮ⅱ,垂直于行星副齿轮ⅱ的方向安装有从动行星齿轮,在转接头上转动安装着齿轮轴,从动行星齿轮刚性连接在齿轮轴上并与行星副齿轮ⅱ啮合,
12.在气囊球上还套有置于摆臂固定圈下方的支撑圈,所述竖支撑杆的下端安装在转接头的右端部,并竖直往上延伸,其上端固定在支撑圈上,
13.所述第二拉杆的下端固定在齿轮轴上,第二拉杆的上端与第三拉杆的下端通过球头杆铰接着,第三拉杆的上端固定在摆臂上。
14.优选的,在第一拉杆外还套有横支撑杆,在第一拉杆的两端套有轴套,横支撑杆套在轴套上。
15.优选的,所述摆臂由主摆臂和副摆臂组成,主摆臂的上端固定在摆臂固定圈上,主摆臂的下端设有摆尾,副摆臂的下端固定在主摆臂下端,副摆臂短于主摆臂,在副摆臂与主摆臂之间桥接有连接筋,并且越接近摆尾方向主摆臂和副摆臂之间的间隔距离越小。副摆臂为主摆臂增加韧性结构,使其在摆动时增加强度和重量,让主摆臂摆动得更加有节奏感,不至于发生抖动,还增加了鱼尾状的摆尾设计,使其摆动式更具美观度。
16.优选的,主摆臂的上端宽度宽于主摆臂的臂身,且上端面呈弧形,其弧长等于支撑圈的弧长,并且在主摆臂的上端面设有铰接套,铰接套转动安装在支撑圈上。
17.优选的,所述第二拉杆和第三拉杆均设有两组,沿主摆臂的宽度方向设有置于主摆臂的下底面的连接杆,两组第三拉杆的上端分别固定在连接杆的两端头,两组第二拉杆的下端分别固定在齿轮轴的两端头,两组第二拉杆保持平行,两组第三拉杆保持平行。
18.优选的,摆臂和摆臂支架结构均设有六组,并且一对一等间距分布在气囊球的外周。
19.优选的,齿轮套呈六边形,在六个面上均打有拉杆孔,六组第一拉杆从六个拉杆孔穿插进去。
20.优选的,所述主摆臂和副摆臂采用硅胶、pvc软板和橡胶中的其中一种柔性材料。
21.优选的,在摆臂固定圈的垂直面上还设有环住气囊球的环抱箍。
22.优选的,在环抱箍的顶部位置、摆臂固定圈的两个对称位置安装有方向控制马达。
23.本发明与现有技术相比的有益效果是:
24.六组摆臂在摆动的时候,会出现收缩和扩张的运动轮廓,会带动周围的空气流动,从而帮助气囊球飞升,在收缩和扩张时还能减少气囊球的飞升阻力,增加了飞升时推动力,提高推进效果,气流的流动还会带动气囊球左右摆动飞升,从仿生观念讲,飞升的自由摆幅更能体现该机械的灵活性和仿生的相似度。
25.气囊球和扩张状态的摆臂呈钟状体状态,在前进或飞升的推进过程中,摆臂可以以最快的速度进行收缩,钟状体的投影范围会在向前推进的过程中有所减小,因此在充分确保摆臂摆动频率的基础上,其收缩比不断提高,进而降低该仿生机械在推进过程中所受到的阻力。另外,顶部气囊球的流线形形状,也能够在很大程度上减小仿生机械在推进过程中所受到的阻力。
26.整个仿生机械的张拉可展机构可以凭借自身工作状态的转变,再借助驱动设备创造驱动力,进一步实现机构自身的舒张和收缩。当处于工作情况时,张拉可展机构会将自身固定为展开状态,使自身保持一种钢化模式,进而提高可靠性与稳定性,以期充分发挥自身不同状态之下的承载作用。在张开时需要运用外力将运动副拉起来,通过张拉可展结构的特性,拉杆会被拉到最大值,将外力卸掉后,进行自由张拉可展运动,实现摆臂的推动,这样做的目的不仅节省了能源,同时还保护了环境,达到了绿色设计标准。
附图说明
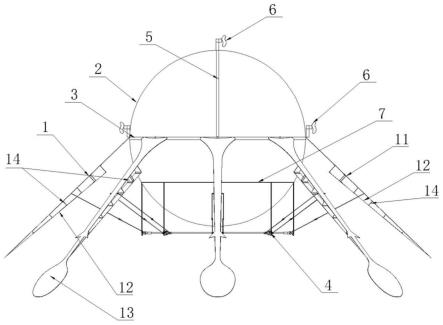
27.图1为本发明的主视结构视图;
28.图2为本发明的仰视结构示意图;
29.图3为本发明的立体结构示意图;
30.图4为本发明摆臂和臂支架结构装配的立体结构示意图;
31.图5为图4中a处的放大结构示意图;
32.图6为图4中b处的放大结构示意图;
33.图7为臂支架结构的立体结构示意图;
34.图8为图7中c的的放大结构示意图。
具体实施方式
35.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例进一步阐述本发明。
36.如图1—图8示的一种空中飞行的仿生机械,包括摆臂1,以及气囊球2、摆臂固定圈3和摆臂支架结构4,所述摆臂固定圈3套在气囊球2外周,所述摆臂1上端以气囊球2为中心
固定在摆臂固定圈3上,并环绕一圈,摆臂1的下端悬空,摆臂支架结构4固定在气囊球2与摆臂1之间用于拉动摆臂1做上下摆动的往复运动,另外,为确保气囊球2的稳定形状,在摆臂固定圈3的垂直面上还设有环住气囊球2的环抱箍5,摆臂固定圈3和环抱箍5在x和y轴两个平面上,相互垂直,支撑起具有三维空间的气囊球2,气囊球2内充值氦气,带动整个仿生机械飞起来。
37.在环抱箍5的顶部位置、摆臂固定圈3的两个对称位置安装有方向控制马达6,方向控制马达6带扇叶,可以通过遥控器启动某一方位的方向控制马达6来控制气囊球2转向,方向控制马达6可以再多个方位设置多个,根据实际情况而定。
38.在气囊球2上还套有置于摆臂固定圈3下方的支撑圈7,支撑圈7直径小于摆臂固定圈3。
39.所述摆臂1由主摆臂11和副摆臂12组成,主摆臂11的上端固定在摆臂固定圈3上,主摆臂11的下端设有摆尾13,副摆臂12的下端固定在主摆臂11下端,副摆臂12短于主摆臂11,在副摆臂12与主摆臂11之间桥接有连接筋14,并且越接近摆尾13方向主摆臂11和副摆臂12之间的间隔距离越小。
40.主摆臂11的上端宽度宽于主摆臂11的臂身,且上端面呈弧形,便于摆臂1摆动的时候不会与气囊球2表面产生干涉、摩擦,其弧长等于支撑圈7的弧长,并且在主摆臂11的上端面设有铰接套15,铰接套15转动安装在支撑圈7上。
41.主摆臂11和副摆臂12采用硅胶、pvc软板和橡胶中的其中一种柔性材料。橡胶的抗氧化能力和耐腐蚀性不如硅胶和pvc软板,并且性能受温度影响较大;硅胶的优点是耐热性、耐寒性,但在常温下它的物理机械性能不如橡胶和pvc软板;并且橡胶和硅胶的易加工性不如pvc软板,并且橡胶和硅胶会因为自身的摩擦而产生干涉;所以这里选用pvc软板制作主摆臂和副摆臂,主摆臂下底面的连接杆也采用pvc软板制作。
42.本事实例中的仿生机械,摆臂1和摆臂支架结构4均设有六组,并且一对一等间距分布在气囊球2的外周。
43.具体的,所述摆臂支架结构4包括驱动电机40、行星主齿轮41、行星副齿轮ⅰ42、齿轮套43、第一拉杆44、第二拉杆45、第三拉杆46和竖支撑杆47,所述行星主齿轮41安装在驱动电机40的输出轴上,齿轮套43套在行星主齿轮41外,在齿轮套43的侧壁设有拉杆孔43-1,驱动电机40的机身需要固定在齿轮套43的下方。其实齿轮套43是分为上、下两个齿轮套,在上齿轮套的下底面设有半圆孔,在下齿轮套的上顶面设有半圆孔,两个半圆孔相扣形成拉杆孔43-1,错开拉杆孔43-1的位置设有锁紧孔43-2,螺栓穿过锁紧孔43-2将上齿轮套和下齿轮套紧紧的连接在一起,这样就能夹紧第一拉杆44,并且拆装方便。
44.第一拉杆44的其中一端穿过拉杆孔43-1深入齿轮套43内部,齿轮套43呈六边形,在六个面上均打有拉杆孔43-1,六组第一拉杆44从六个拉杆孔43-1穿插进去,行星副齿轮ⅰ42套在第一拉杆处于齿轮套43内的端头并与行星主齿轮41啮合,六个1行星副齿轮ⅰ42围绕一圈,排布在行星主齿轮41上面,一个行星主齿轮41转动,就带动六个方位的行星副齿轮ⅰ42转动,将动力从六个方向传输出去,第一拉杆44的另一端向着气囊球2的径向方向延伸,在远离齿轮套43的第一拉杆端头还安装有转接头48,第一拉杆44穿过转接头48的左端部安装有行星副齿轮ⅱ49,垂直于行星副齿轮ⅱ49的方向安装有从动行星齿轮49-1,在转接头48上转动安装着齿轮轴48-1,从动行星齿轮49-1刚性连接在齿轮轴48-1上并与行星副齿轮
ⅱ
49啮合,优选的,在第一拉杆44外还套有横支撑杆(图中44标号所指之处,横支撑杆在外,第一拉杆44在内,横支撑杆是固定的,第一拉杆是转动的),在第一拉杆44的两端套有轴套,横支撑杆套在轴套上,横支撑杆也是需要穿插在转接头48和拉杆孔43-1内的,保证第一拉杆44在行星副齿轮ⅰ42的带动下保持转动状态,才能将动力传输给行星副齿轮ⅱ49,行星副齿轮ⅱ49继而带动从动行星齿轮49-1转动,从而刚性连接着的齿轮轴48-1产生转动,最后将动力传输给第二拉杆45。
45.所述第二拉杆45的下端固定在齿轮轴48-1上,第二拉杆45的上端与第三拉杆46的下端通过球头杆铰接着,第三拉杆46的上端固定在摆臂1上,且固定位置接近摆臂1的中间。第二拉杆45由齿轮轴48-1带动着产生360
°
的转动运动,与第二拉杆45铰接的第三拉杆46就发生摆动运动,使得摆臂1出现一扩一缩的扩张运动。
46.所述第二拉杆45和第三拉杆46均设有两组,沿主摆臂11的宽度方向设有置于主摆臂11的下底面的连接杆16,连接杆16和主摆臂11材料相同,可采用粘接的方式固定,两组第三拉杆46的上端分别固定在连接杆16的两端头,两组第二拉杆45的下端分别固定在齿轮轴48-1的两端头,两组第二拉45杆保持平行,两组第三拉杆46保持平行,齿轮轴48-1和两组第二拉杆45、两组第三拉杆46、连接杆16形成矩形结构。
47.所述竖支撑杆47的下端安装在转接头48的右端部,并竖直往上延伸,其上端固定在支撑圈7上,此支撑用于保持第一拉杆44的水平,将动力部件水平的悬挂在气囊球2下方,既能支撑起气囊球2,又能将摆臂1和摆臂支架结构4稳定的支撑起。
48.通过驱动电机40的转动,将转动力传输到每个拉杆上,从而拉动每个摆臂1发生形变,在空气中不断的扩张、收缩,在整个扩张、收缩的过程中推进气囊球2飞升,使得整个仿生机械更生动形象,仿生效果优良,将高持续性与强柔韧度集于一体,具有运行效率高、操作便捷的特点,脱离了水的浮力,也能模拟水母的运动在陆地上活动。
49.该仿生机械模仿水母的形状,在水中游动的时候气囊球2可以浮起来,扩张运动的摆臂1可以利用水的浮力在水中游动,弧形气囊球2减少阻力,摆动的摆臂1同样可以减少游动的阻力,仿生机械静止不动的时候,气囊球2里面的氦气也足够支撑整体不下沉。
50.当然,在该仿生机械上面还可以搭载检测器用于检测空气参数,还可以搭载监视器等电子设备。
51.以上对本发明提供的一种空中飞行的仿生机械进行了详细介绍。具体实施例的说明只是用于帮助理解本发明的方法及其核心思想,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1