一种航天一体式两维对日定向驱动装置的制作方法
1.本发明属于间机构技术领域,尤其涉及一种航天一体式两维对日定向驱动装置。
背景技术:
2.航天器在轨能源需要通过太阳翼对日定向进行补给。随着航天器星上载荷增多,航天器所需要的能源也随之增加,传统的固定翼构型已不能满足部分航天器的在轨能源需求。目前对日定向驱动装置已发展出一维对日定向驱动装置和两维对日定向驱动两种方式。
3.当前广泛使用的两维对日定向驱动装置多为分体式两维驱动装置,存在以下弊端:分体式驱动装置两轴需要额外零件进行连接,不仅会增加体积,也会增加重量,无法满足航天器对轻量化、结构紧凑的需求。
技术实现要素:
4.本发明的技术目的是提供一种航天一体式两维对日定向驱动装置,以解决现有技术中分体式两维驱动装置体积、重量大,对航天器的设计造成困难的技术问题。
5.为解决上述问题,本发明的技术方案为:
6.一种航天一体式两维对日定向驱动装置,包括:a轴驱动装置、b轴驱动装置和壳体;
7.壳体开设有自上向下相对应的第一通孔组,a轴驱动装置经第一通孔组穿设于壳体设置,壳体开设有自左向右相对应的第二通孔组,b轴驱动装置经第二通孔组穿设于壳体设置,a轴驱动装置与b轴驱动装置相互垂直一体化设置;
8.a轴驱动装置和b轴驱动装置分别用于
±
180
°
、
±
90
°
范围内往复摆动,相互配合,以带动与a轴驱动装置连接的太阳翼旋转精确对日。
9.具体地,a轴驱动装置包括第一电机、a轴谐波减速器、a轴驱动轴和a轴位置传感器;
10.第一电机与a轴谐波减速器的一端连接,a轴谐波减速器的另一端与a轴驱动轴的一端连接,a轴驱动轴的另一端设有a轴位置传感器;
11.第一电机用于提供摆动动力,a轴谐波减速器用于进行减速,a轴驱动轴用于带动外部的太阳翼,a轴位置传感器用于采集a轴驱动轴的位置信息。
12.进一步优选地,a轴驱动装置还包括第一锁紧螺母,a轴深沟球轴承和两个a轴角接触轴承;
13.第一锁紧螺母用于连接第一电机和a轴谐波减速器;
14.a轴深沟球轴承套设于a轴驱动轴靠近a轴谐波减速器的一端,两个a轴角接触轴承套设于a轴驱动轴的另一端,用于对a轴驱动轴进行限位支撑。
15.具体地,b轴驱动装置包括第二电机、b轴谐波减速器、b轴行星减速器、b轴驱动轴、b轴传动轴和b轴位置传感器;
16.第二电机与b轴谐波减速器的一端连接,b轴谐波减速器的另一端与b轴行星减速器的一端连接,b轴行星减速器的另一端与b轴驱动轴的一端连接,b轴驱动轴的另一端与b轴传动轴的一端连接,b轴传动轴的另一端设有b轴位置传感器;b轴驱动轴与b轴传动轴的连接处穿设有a轴驱动轴;
17.第二电机用于提供摆动动力,b轴谐波减速器和b轴行星减速器用于进行减速,b轴驱动轴和b轴传动轴用于带动a轴驱动轴绕b轴方向摆动,b轴位置传感器用于采集b轴传动轴的位置信息。
18.进一步优选地,b轴驱动装置还包括第二锁紧螺母,b轴深沟球轴承和两个b轴角接触轴承;
19.第二锁紧螺母用于将第二电机和b轴谐波减速器和b轴行星减速器依次连接;
20.b轴深沟球轴承套设于b轴驱动轴靠近b轴谐波减速器的一端,两个b轴角接触轴承套设于b轴传动轴远离b轴谐波减速器的一端,b轴深沟球轴承用于对b轴驱动轴进行限位支撑,b轴角接触轴承用于对b轴传动轴进行限位支撑。
21.其中,两个a轴角接触轴承采用“背对背”安装,两个b轴角接触轴承采用“背对背”安装。
22.进一步优选地,还包括挡圈和轴承固定座,挡圈和轴承固定座相互配合分别固定a轴深沟球轴承、b轴角接触轴承、b轴深沟球轴承和b轴角接触轴承。
23.进一步优选地,还设有支架,支架为u形结构,支架的两侧端分别与b轴驱动装置的两端固定连接,支架底部与外部航天器固定连接。
24.进一步优选地,还设有第一密封圈和第二密封圈,用于分别对a轴驱动装置和b轴驱动装置进行密封。
25.本发明由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
26.本发明将两自由的对日定向驱动装置进行了一体化设计,a、b轴驱动装置通过十字形壳体紧凑地连接在一起,节省空间。且b轴驱动装置与航天器通过一体化u形支架连接,降低了重量,同时对跨距较大的b轴进行了良好的支撑,增加了结构刚度。
27.本发明设计的一体式两维对日定向驱动装置中b轴驱动装置采用“行星减速器+谐波减速器”两级减速,驱动力矩范围较大;通过合理配置对日定向驱动装置轴系,增加了一体式两维对日定向驱动装置的承载能力。
28.本发明设计的一体式两维对日定向驱动装置采用密封设计,能够满足多种空间环境下使用。
29.本发明设计的一体式两维对日定向驱动装置通过a轴、b轴垂直连接,能够实现大范围的两自由度对日定向。此设计能够实现满足多种空间环境、多平台航天器使用,具有广泛的适用性。
附图说明
30.通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。
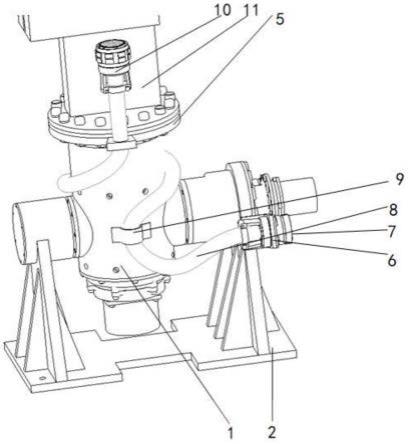
31.图1为本发明本实施例的一种航天一体式两维对日定向驱动装置结构图;
32.图2为本发明本实施例的一种航天一体式两维对日定向驱动装置的剖视图。
33.附图标记说明
34.1:壳体;2:支架;301:第一电机;302:a轴谐波减速器;303:a轴驱动轴;304:a轴位置传感器;305:第一锁紧螺母;306:a轴深沟球轴承;307:a轴角接触轴承;308:第一挡圈;309:第一轴承固定座;310:第二挡圈;311:第二轴承固定座;312:第一密封圈;401:第二电机;402:b轴谐波减速器;403:b轴行星减速器;404:b轴驱动轴;405:b轴传动轴;406:b轴位置传感器;407:第二锁紧螺母;408:b轴深沟球轴承;409:b轴角接触轴承;410:第三挡圈;411:第三轴承固定座;412:第四挡圈;413:第四轴承固定座;414:第二密封圈;5:对接法兰;6:电连接器支架;7:星外端电连接器;8:传输电缆;9:卡箍;10:星内端电连接器;11:根部铰链。
具体实施方式
35.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
36.为使图面简洁,各图中只示意性地表示出了与本发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
37.以下结合附图和具体实施例对本发明提出的一种航天一体式两维对日定向驱动装置作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。
38.实施例
39.参看图1,本实施例提供一种航天一体式两维对日定向驱动装置,包括:a轴驱动装置、b轴驱动装置、壳体1和支架2。壳体1开设有自上向下相对应的第一通孔组,a轴驱动装置经第一通孔组穿设于壳体1设置,即沿高度方向设置。壳体1开设有自左向右相对应的第二通孔组,b轴驱动装置经第二通孔组穿设于壳体1设置,即沿水平方向设置,a轴驱动装置与b轴驱动装置相互垂直一体化紧固连接设置。然后b轴驱动装置的外壳体1与支架2连接,支架2为u形结构,支架2的两侧端分别与b轴驱动装置的两端外壳固定连接,支架2的u形底部与外部航天器固定连接。星内端电连接器10的传输电缆8通过卡箍9固定在壳体1外侧引至电连接器支架6上的星外端电连接器7。太阳翼通过根部铰链11与a轴驱动装置对接法兰5通过螺钉紧固连接。a轴驱动装置和b轴驱动装置分别用于
±
180
°
、
±
90
°
范围内往复摆动,相互配合,以带动与a轴驱动装置连接的太阳翼旋转精确对日。采用两自由度电缆传输方式,在保证大角度摆动范围的同时,提高了传输的可靠性。
40.参看图2,a轴驱动装置包括第一电机301、a轴谐波减速器302、a轴驱动轴303和a轴位置传感器304,第一锁紧螺母305,a轴深沟球轴承306和两个a轴角接触轴承307。
41.第一电机301与a轴谐波减速器302的一端通过第一锁紧螺母305连接在一起,第一电机301用于提供摆动动力。a轴谐波减速器302的另一端与a轴驱动轴303的一端连接,a轴
谐波减速器302用于接收电机的动力并进行加以减速。a轴驱动轴303的另一端设有a轴位置传感器304,a轴驱动轴303用于带动外部的太阳翼,a轴位置传感器304用于采集a轴驱动轴303的位置信息。a轴深沟球轴承306套设于a轴驱动轴303靠近a轴谐波减速器302的一端,两个a轴角接触轴承307则套设于a轴驱动轴303的另一端,用于对a轴驱动轴303进行限位支撑,两个a轴角接触轴承307采用“背对背”安装。
42.参看图2,在本实施例中,b轴驱动装置包括第二电机401、b轴谐波减速器402、b轴行星减速器403、b轴驱动轴404、b轴传动轴405、b轴位置传感器406、第二锁紧螺母407,b轴深沟球轴承408和两个b轴角接触轴承409。
43.第二电机401与b轴谐波减速器402的一端通过第二锁紧螺母407连接,第二电机401用于提供摆动动力。b轴谐波减速器402的另一端与b轴行星减速器403的一端通过第二锁紧螺母407连接,b轴行星减速器403的另一端与b轴驱动轴404的一端连接,b轴谐波减速器402和b轴行星减速器403进行两级减速。b轴驱动轴404的另一端与b轴传动轴405的一端连接,b轴传动轴405的另一端设有b轴位置传感器406;b轴驱动轴404与b轴传动轴405的连接处穿设有a轴驱动轴303。从而使得b轴驱动轴404和b轴传动轴405带动a轴驱动轴303绕b轴方向摆动,b轴位置传感器406用于采集b轴传动轴405的位置信息。b轴深沟球轴承408套设于b轴驱动轴404靠近b轴谐波减速器402的一端,即b轴驱动轴404右侧端,两个b轴角接触轴承409套设于b轴传动轴405远离b轴谐波减速器402的一端,即b轴传动轴405左侧端。b轴深沟球轴承408用于对b轴驱动轴404进行限位支撑,b轴角接触轴承409用于对b轴传动轴405进行限位支撑。同样地,两个b轴角接触轴承409也采用“背对背”安装,增加了承载能力。
44.参看图2较优地,还包括若干挡圈和若干轴承固定座,挡圈和轴承固定座相互配合分别固定a轴深沟球轴承306、b轴角接触轴承409、b轴深沟球轴承408和b轴角接触轴承409。具体地,其中a轴深沟球轴承306通过第一挡圈308和第一轴承固定座309压紧,两个a轴角接触轴承307通过第二挡圈310和第二轴承固定座311压紧并保持预紧力。b轴深沟球轴承408通过第三挡圈410和第三轴承固定座411压紧,两个b轴角接触轴承409通过第四挡圈412和第四轴承固定座413压紧并保持预紧力。
45.根据构型b轴可以在一定范围内摆动,通过b轴位置传感器406获取b轴驱动装置实时角度。b轴驱动装置的b轴位置传感器406定子固定在支架2内部,转子固定在传动轴上。a轴驱动装置与b轴驱动装置垂直安装,通过电缆合理布置可以在接近360度范围内往复摆动。通过a轴位置传感器304获取a轴角度,a轴驱动装置的a轴位置传感器304定子固定在位置传感器支座上,转子固定在a轴驱动轴303上。通过a轴、b轴实时获取位置信息,一体式两维对日定向驱动装置可以高精度对日定向,驱动太阳翼更有效的为航天器提供能源补给。
46.参看图2,较优地,还设有第一密封圈312和第二密封圈414,对本实施例进行密封设计,可以广泛用于多种空间环境。其中a轴驱动装置采用第一密封圈312进行密封,b轴驱动装置采用第二密封圈414进行密封。
47.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范围之内,则仍落入在本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1