一种多角度拍摄无人机
1.本发明涉及无人机领域。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机用于多种领域,特别是用于拍摄。
3.现在的用于拍摄的无人机通常情况下只能够上下转动,当需要左右转动的时候,需要整体使得无人机转动,会使得拍摄不稳定以及不连续平滑,同时现有的无人机无法实现镜头自转。
技术实现要素:
4.本发明公开了一种多角度拍摄的无人机,包括有无人机机体以及位于无人机机体上的拍摄单元,所述的无人机机体执行飞行指令,所述的拍摄单元用于进行拍摄,其特征在于,所述的拍摄单元设有摄像头,所述的拍摄单元能够提供给摄像头至少三个转动自由度,以实现多角度的飞行拍摄。
5.在一个优选的实施例当中,所述的拍摄单元包括有升降臂、包括所述摄像头的摄像单元、固定组件、第一驱动装置,所述的摄像单元和第一驱动装置位于升降臂的两个末端,所述的固定组件将升降臂固定在无人机机体上,升降臂的轴向延伸方向设定为第一轴向,第一驱动装置能够驱动摄像头绕着第一轴向轴向自转;所述的固定组件被设定为驱动摄像头绕着第二轴向轴向自转,第二轴向与第一轴向垂直,所述的摄像头能够绕着第三轴向轴向自转,第三轴向和第一轴向、第二轴向均垂直。
6.在一个优选的实施例当中,所述的升降臂内设有与摄像头耦合的控制臂,第一驱动装置通过控制臂控制摄像头绕着第一轴向轴向自转;固定组件内设有第二驱动装置,第二驱动装置与控制臂耦合,第二驱动装置通过控制臂控制摄像头绕着第二轴向轴向自转。
7.在一个优选的实施例当中,所述的摄像单元还包括有旋转头、2个支座、旋转头和升降臂的末端连接,旋转头和升降臂之间相对第一轴向转动,2个支座位于旋转头的末端,2个支座之间设有第二转轴,第二转轴位于第二轴向上,第二转轴上安装有所述的摄像头,摄像头能够被驱动绕着第二转轴转动。
8.在一个优选的实施例当中,所述的摄像头内设有控制腔体,控制腔体内设有2个第二驱动装置,每个第三驱动装置包括有驱动座、伸缩臂,驱动座安装在第二转轴上,驱动座能够相对第二转轴在第二轴向方向上转动,驱动座的外部设有一个铰接槽,伸缩臂的一端与驱动座在铰接槽内铰接,铰接轴设定为第四轴向,第四轴向与第三轴向平行,伸缩臂的另一端和控制腔体的侧面连接,伸缩臂的长度能够被控制变化以使得伸缩臂能够给第二转轴第一轴向方向的力,两个伸缩臂给第二转轴的力相反,以使得第三转轴不同的时候,摄像头以第三轴向自转。
9.在一个优选的实施例当中,所述的控制臂包括有依次连接的第一控制臂、第二控制臂、第三控制臂、第四控制臂,摄像头的侧面设有第三转轴,第一控制臂的末端与第三转轴铰接,第三转轴位于第三轴向上。
10.在一个优选的实施例当中,所第一控制臂的另一端铰接第二控制臂,第一控制臂和第二控制臂铰接轴的方向与第二轴向平行,第二控制臂和第三控制臂铰接,第二控制臂和第三控制臂的铰接方向与第二轴向平行,第三控制臂和第四控制臂固定连接,第四控制臂的轴向方向位于第四轴向上,并且第四控制臂的轴向方向和第一控制臂的轴向方向平行且不重合。
11.在一个优选的实施例当中,第二驱动装置包括有连接环、连接杆、螺杆、第二电机,连接环套在第四控制臂上,并相对第四控制臂仅具有第一轴向转动自由度,连接环的外臂上设有环槽,环槽内卡入连接杆,连接杆的另一端丝杆连接有螺杆,螺杆被第二电机驱动转动。
12.在一个优选的实施例当中,第二驱动装置内设有第一电机,第一电机能够驱动第四控制臂轴向自转。
13.在一个优选的实施例当中,升降臂的边缘设有一端开口,连接杆穿过开口。
14.本发明公开的拍摄无人机能够实现无人机悬停不转动的情况下,三个转动自由度的角度拍摄以及一个竖直方向上的移动自由度,更容易方便取景。
附图说明
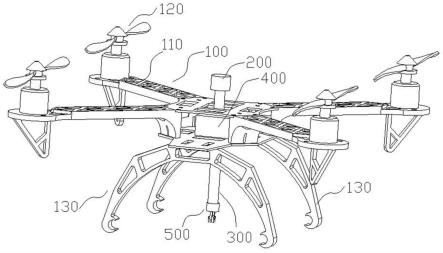
15.图1是实施例无人机的结构示意图;
16.图2是摄像单元的示意图;
17.图3是摄像头的示意图;
18.图4是摄像头的示意图;
19.图5是控制臂的示意图;
20.图6是控制腔体的示意图;
21.图7是第二驱动装置的示意图;
22.图中标记:100-无人机机体,110-连接臂,120-螺旋桨,130-降落架,200-第一驱动装置,210-第一电机300-升降臂,400-固定组件,410-第二驱动装置,411-连接环,412-连接杆,413-螺杆,414-第二电机,500-摄像单元,510-旋转头,520-支座,530-摄像头,532-第三转轴,533-活动通道,540-第二转轴,550-控制臂,551-第一控制臂,552-第二控制臂,553-第三控制臂,554-第四控制臂,560-控制腔体,570-第三驱动装置,571-驱动座,572铰接槽,573-伸缩臂,600-齿轮。
具体实施方式
23.下面结合附图,对本发明作详细的说明。
24.本实施例公开了一种多角度拍摄的无人机,包括有无人机机体100以及位于无人机机体100上的拍摄单元,所述的无人机机体100执行飞行指令,所述的拍摄单元用于进行拍摄,其特征在于,所述的拍摄单元设有摄像头530,所述的拍摄单元能够提供给摄像头至少三个转动自由度,以实现多角度的飞行拍摄。所述的无人机机体100包括四个连接臂110,
每个连接臂110的末端设有螺旋桨120,无人机机体的底部还设有降落架130用于方便无人机的升空和降落。
25.如图1和图2所示,所述的拍摄单元包括有升降臂300、包括所述摄像头530的摄像单元500、固定组件400、第一驱动装置200,所述的摄像单元500和第一驱动装置200位于升降臂300的两个末端,所述的固定组件400将升降臂300固定在无人机机体100上,升降臂的轴向延伸方向设定为第一轴向(如图2所示的x方向);并且固定组件400能够驱动升降臂300延伸第一轴向方向上下移动,以使得摄像头能够上下移动,在需要的时候能够尽可能的位于无人机机体的下部,避免被降落架130和无人机机体100挡住拍摄视野,并且在降落的时候,升降臂300收缩向上移动,避免和地面发生撞击,起到保护摄像头530的作用。在优选的实施例当中,为了达到上述目的,如图7所示,固定组件400内设有齿轮600,齿轮600和升降臂的外表面齿合,当齿轮600被驱动转动的时候,能够驱动升降臂相对固定组件400上下移动(如图7所示的左右方向)。
26.所述的第一驱动装置200能够驱动摄像头绕着第一轴向轴向自转;所述的固定组件400被设定为驱动摄像头绕着第二轴向轴向自转,第二轴向与第一轴向垂直,所述的摄像头能够绕着第三轴向轴向自转,第三轴向和第一轴向、第二轴向均垂直。所述的升降臂300内设有与摄像头530耦合的控制臂550,第一驱动装置通过控制臂550控制摄像头绕着第一轴向轴向自转;固定组件400内设有第二驱动装置410,第二驱动装置与控制臂耦合,第二驱动装置通过控制臂控制摄像头绕着第二轴向轴向自转。
27.所述的摄像单元500还包括有旋转头510、2个支座(520)、旋转头510和升降臂300的末端连接,旋转头和升降臂之间相对第一轴向转动,2个支座位于旋转头的末端,2个支座之间设有第二转轴540,第二转轴位于第二轴向上,第二转轴上安装有所述的摄像头530,摄像头能够被驱动绕着第二转轴转动。所述的摄像头530内设有控制腔体560,控制腔体560内设有2个第二驱动装置570,每个第三驱动装置570包括有驱动座571、伸缩臂573,驱动座570安装在第二转轴540上,驱动座570能够相对第二转轴在第二轴向方向上转动,驱动座570的外部设有一个铰接槽(572),伸缩臂的一端与驱动座在铰接槽572内铰接,铰接轴设定为第四轴向,第四轴向与第三轴向平行,伸缩臂的另一端和控制腔体的侧面连接,伸缩臂的长度能够被控制变化以使得伸缩臂能够给第二转轴第一轴向方向的力,两个伸缩臂给第二转轴的力相反,以使得第三转轴不同的时候,摄像头3以第三轴向自转。
28.所述的控制臂550包括有依次连接的第一控制臂551、第二控制臂552、第三控制臂553、第四控制臂554,摄像头的侧面设有第三转轴532,第一控制臂的末端与第三转轴532铰接,第三转轴位于第三轴向上。
29.第一控制臂的另一端铰接第二控制臂552,第一控制臂和第二控制臂铰接轴的方向与第二轴向平行,第二控制臂和第三控制臂铰接,第二控制臂和第三控制臂的铰接方向与第二轴向平行,第三控制臂和第四控制臂554固定连接,第四控制臂的轴向方向位于第四轴向上,并且第四控制臂的轴向方向和第一控制臂的轴向方向平行且不重合。
30.第二驱动装置410包括有连接环411、连接杆412、螺杆413、第二电机414,连接环411套在第四控制臂554上,并相对第四控制臂554仅具有第一轴向转动自由度,连接环411的外臂上设有环槽,环槽内卡入连接杆412,连接杆的另一端丝杆连接有螺杆413,螺杆被第二电机414驱动转动。
31.第二驱动装置200内设有第一电机210,第一电机能够驱动第四控制臂轴向自转。
32.升降臂的边缘设有一端开口,连接杆412穿过开口。
33.摄像头在转动和移动的时候,不同自由度会相互影响,本发明的无人机的摄像头在不同方向转动和移动的工作机理如下:
34.摄像头绕着第一轴向(x方向)自转:第一电机210驱动第四控制臂554轴向自转,连接环411不转动,第一控制臂551绕着第一轴向旋转,进而使得摄像头530绕着第一轴向自转,并带动旋转头510相对升降臂300转动。
35.摄像头绕着第二轴向(y方向)自转:第二电机414带动螺杆自转,并带动连接杆412、连接环411沿着第一轴向移动,进而使得第四控制臂554的图7左侧部分沿着第一轴向移动,第四控制臂的图7右侧部分长度可变,具体的右侧有两截组成,第一截的末端一段插入第二截,并且插入的部分可以为正方形,使得第一截和第二截之间无法轴向(第一轴向)自转,第一截和第二截之间可以实现第一轴向的相互滑动。第四控制臂554驱动第一控制臂551绕着第一轴向往复移动,进而使得摄像头绕着第二轴向自转。
36.摄像头绕着第三轴向(z方向)自转:两个伸缩臂573的长度被控制变化(具体为现有技术),两个伸缩臂中心位置位于z方向上,两个伸缩臂573以相同的变化伸缩,使得摄像头530能够相对第二转轴540在第三轴向上自转,由于第三轴向和第三转轴532同轴,因此第一控制臂、第二控制臂能够保持相对不同,摄像头绕着第三轴向转动。
37.摄像头在第一方向上移动:齿轮被驱动转动,使得升降臂300沿着第一轴向移动,螺杆设置有伸缩结构(和第四控制臂右侧长度可变相同),连接环411、连接杆和一部分螺杆在第一轴向上移动,另一部分螺杆和第二电机相对固定组件保持不动,摄像头能够跟随升降臂300在第一方向上移动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1