一种用于浮空风力发电平台的自适应高度调节装置
1.本发明属于高空风力发电系统领域,具体涉及一种用于浮空风力发电平台的自适应高度调节装置。
背景技术:
2.浮空式风力发电技术是近年来快速发展的一种新型风力发电技术,其原理是在充有低密度气体的气球平台上,搭载风力发电机,并在传统塔式风力发电机难以覆盖的高度范围(离地距离大于100米)实现风力资源的充分利用。浮空式风力发电系统主要由浮空发电平台、系留索及电缆、地面能源管理与安全系统三部分组成。在该系统中,浮空发电平台所产生的电能将通过电缆输送至地面储能模块,由于其工作高度的不同,其风力资源甚至可以是地面的2—5倍,因此可以实现较高的发电效率,可实现低成本的发电和稳定的电力供应保障。
3.作为中高空风能发电技术的一种,系留浮空器具有结构简单、容易控制、能够实现长时间高效率发电等优点,受到了国外altaeros energies、magenn power等多家公司和研究机构的关注与研发。其中,chris vermillion提出了一种涵道式风力涡轮机结构(lighter-than-air wind energy systemsdoi:10.1007),该系统可工作在500m以上高空,空气动力学稳定性较低,目前没有实现商业化。magenn公司设计制造了空气转子系统,并申请了专利(专利号:us-20100259050-a1)。该系统工作在300m高度,可实现100—1000kw发电功率,但系统发电通过球体自转,耐久性差,系统工作方式复杂造成维护成本高,目前还是概念阶段。
4.浮空式风力平台不仅可以用于发电,该平台通过搭载通信基站、监测系统、科研设备等,还可以在应急保障、环境监测和高空设备测试等方面实现自由灵活的应用。而其重要组成构件系留绳是一种复合线缆,起着重要作用,除了控制飞行高度和飞行状态外,还有传输电能、转递信号等作用。
5.对于系留绳而言:首先,需要关注的是缆绳的阻力问题;缆绳在空中随飞行器一起运动会产生空气阻力,运动速度越快,参与运动的绳长越长,阻力带来的能量消耗也越多;降低缆绳的阻力可有效提升飞行器的飞行速度和高度。其次,要关注的是缆绳的重量问题;飞行器飞行高度越高,则缆绳越长,重量也越大,因而缆绳重量是限制飞行高度的主要因素之一。对于高空风力发电系统awes,缆绳还要承担将产生的电能传输到地面的任务,增加缆绳导电功能会进一步增大单位长度缆绳的重量。并且绳子在恶劣环境中长时间受到高强度荷载,会加剧老化速度,缩短其使用寿命。一旦系留绳出现断裂,做功系统将受到极大的破坏,整个系统将会暂停工作,还可能带来其他的安全风险。因此,高强度系留绳是保证awes正常工作的重要条件之一,这也使其外形随风速不同变化不明显。当前系留绳只是由简单的承力单元和输电单元复合而成,无传感和自适应调节能力,因此为了确保浮空平台的安全性和稳定性,其重量和拉伸范围通常固定。
6.基于以上缘由,当前系留式浮空器发电机工作高度往往固定,仅能通过人工调节
卷缆装置进行高度调节,不能根据当前的风速状况自动对高度进行调节,限制了其在高空复杂风力状况下对风力资源的充分利用,导致其日平均有效发电时长较短,特别是限制了其在无人值守地区的使用,同时也极易因风速突变而发生意外。
技术实现要素:
7.针对上述存在问题或不足,为解决现有高空风力发电系统的系留绳不能自适应调节高度的问题,本发明提供了一种用于浮空风力发电平台的自适应高度调节装置。
8.一种用于浮空风力发电平台的自适应高度调节装置,由系留索、自动卷缆装置、信号采集装置和控制系统构成。
9.所述信号采集装置实时采集系留索各点位的信息并计算出当前浮空风力发电平台高度范围内的各高度风速,并发送至控制系统。
10.所述控制系统根据接收的实时各高度风速,对自动卷缆装置发出信号,以控制系留索总长度的收放,从而控制浮空风力发电平台的浮空部的停留高度。
11.所述信号采集装置为摄像机和/或传感器。
12.进一步的,所述摄像机设置于地面或浮空部,实时监控系留索各点在无风状态和当前有风状态的夹角θ,并通过软件计算各高度的相对风速大小,从而判断浮空部的最佳发电高度,进而对自动卷缆装置发出控制信号。
13.当浮空风力发电平台的浮空部处于无风悬浮稳定状态时,系留索松弛无张力。而当有风不同高度风速大小不一致时,系留索为产生形变发生位移,风速越大的系留索段会位移更大,如图1中的
①
和
③
所示。根据两段系留索中点连线在有风与无风状态下的夹角θ,可计算出两点的相对风速状态;再利用浮空气球系留点处风速计测得的相对地面的风速值,即可得到各高度的风速值。上述系留索的外形及夹角θ可通过摄像机实时捕获,在控制系统中对图像进行识别处理得到。
14.进一步的,所述信号采集装置还包括传感器,为分段设置在系留索上的柔性薄膜应力传感器,实时监测系留索上多点应力信号,辅助视觉系统(摄像机)判断当前系留索的形状及夹角θ,进一步提高了风速测量的准确性。
15.进一步的,所述摄像机采用两组双目红外摄像机正交排布的设计,根据系留索中电缆发出的热量获取系留索实时形状,并将图像数据传输至控制系统,经算法解析后获取系留索曲线凸点及景深数据,并进一步分析解算出当前最大风速的高度,向自动卷缆装置发出信号,对浮空器的高度进行调节。以应对系留索长度大于100m,在复杂风场的条件下可能出现的螺旋式旋转,以及夜间条件下常规相机无法正常工作的情况。
16.进一步的,所述信号采集装置为湿度传感器,以应对台风、雷雨等极端天气到来时,能通过应力传感器与湿度传感器配合,快速感知并控制自动卷缆装置回收浮空部,通过预设程序控制系留索回收速度,使其降落在指定装置架上并自动固定,最大程度减小浮空器受损带来的经济损失和维护时间成本。
17.进一步的,所述传感器还包括水平感应传感器,分段设置在系留索中,测量传感器设置点位的水平偏转角度和高度,以无风状态的当前点位为基准配合地面自动卷缆装置的点位计算风速。
18.进一步的,所述水平感应传感器,以≤2米的步长设置在系留索中,提高风速测量
的准确性。
19.综上所述,本发明通过采用摄像机和/或多种传感器实时采集数据,以测量整个系留索范围内的各高度的风速,进而控制自动卷缆装置收放高空风力发电系统awes的浮空部;集成自动高度调节系统后,可以全自动自适应实时调节浮空部的高度至最佳风速区间,提高风能利用率的同时实现无人值守,大大降低了浮空器的维护成本,并提高了系统整体的发电效率。
附图说明
20.图1为实施例的风速测量示意图。
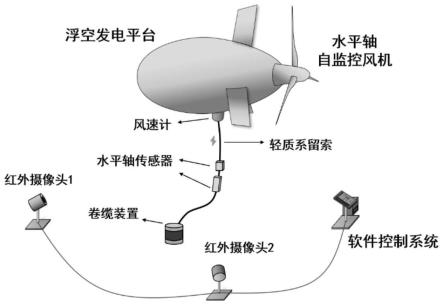
21.图2为实施例的优选方案整体架构示意图。
具体实施方式
22.下面结合附图和实施例对本发明做进一步的详细说明。
23.本实施例以一个气艇作为浮空部示意,如图1所示,虚线为系留索在无风状态时的形状,实线为有风的形状。
[0024]v1
、v2、v3分别为同一时刻不同高度的风速,v1>v3>v2。通过正交排布设置的两组双目红外摄像机,根据系留索中电缆发出的热量获取系留索实时形状;且同时采集系留索各点在无风状态和当前有风状态的夹角θ。将摄像机采集的图像数据传输至控制系统,分别经算法解析后获取系留索曲线凸点及景深数据,并进一步分析解算出当前最大风速的高度,向自动卷缆装置发出信号,对浮空器的高度进行调节。
[0025]
图2示出了加载水平感应传感器(水平轴传感器),以及两组红外摄像机的系统架构示意图。并且还可以在浮空部的顶端也设置有湿度和风速传感器,以应对台风、雷雨等极端天气到来时,能通过传感器快速感知并控制自动卷缆装置回收浮空部,并通过预设程序控制系留索回收速度,使其降落在指定装置架上并自动固定,最大程度减小浮空器受损带来的经济损失和维护时间成本。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1