一种带中式风帆的飞艇及其使用方法与流程
1.本发明涉及一种飞行器及其使用方法,特别是涉及一种带中式风帆的飞艇及其使用方法。
背景技术:
2.现有带风帆的飞艇,目的是为了利用风力辅助飞行,在顺风时可以帮助前进,逆风时则需要降帆以减少前进阻力,并不能很好的利用各方向的风力前进;现有飞艇一般都需要在地面抽真空或者充氦气以获得浮力升空。对飞艇材料的耐压性要求较高;如公开文献cn94100338或者cn201410198047或者cn201510817860。
技术实现要素:
3.与现有技术相比,本发明提出了一种带中式风帆的飞艇,目的在于令飞艇可以利用各方向的风力前进;本发明并提出了一种飞艇的使用方法,无须在地面给飞艇先抽真空或充氦气,而是由飞机把飞艇拖曳到空中后再制造真空浮力直到飞艇获得的真空浮力大于或者等于自重,且飞艇展开风帆后,飞机才与飞艇外接连接装置脱钩分离;之后飞艇的抽真空装置继续抽真空,同时飞艇利用中式风帆持续飞行;飞艇依靠真空浮力和机翼升力可以继续上升到平流层或指定高度。
4.一种带中式风帆的飞艇,包括飞艇本体,所述飞艇本体上安装有中式风帆、控制系统、和电源系统,所述中式风帆包括桅杆和中式硬帆。
5.优选地,所述飞艇本体包括机翼、电动尾舵、外接连接装置以及密闭舱,所述机翼安装于所述飞艇本体两侧,所述电动尾舵安装于所述飞艇本体尾部,所述外接连接装置安装于所述飞艇本体上,所述密闭舱在所述飞艇本体内部。
6.优选地,所述电源系统包括蓄电池、与所述蓄电池相连的太阳能发电装置和/或风力发电装置,所述蓄电池为飞艇的所有用电设备以及搭载设备供电。
7.优选地,所述飞艇本体包括安装于真空管道上的抽真空装置和阀门,所述真空管道一端与所述密闭舱相连,所述真空管道的另一端安装在飞艇外部。
8.优选地,所述外接连接装置包括能与飞机相连的连接装置以及外接接口。
9.优选地,所述密闭舱包括至少两个相互独立的密闭隔舱,每个所述密闭隔舱均包括所述真空管道、所述阀门和所述抽真空装置。
10.优选地,所述控制系统包括智能自动控制系统,所述智能自动控制系统包括处理器以及与所述处理器相连的通讯模块、传感器以及伺服机构,所述通讯模块通过5g/b5g和/或卫星互联网通讯模式与远程控制中心通讯。
11.优选地,所述控制系统包括控制所述中式硬帆的电动拉索绞盘、控制所述中式硬帆方向转动的转向拉索以及控制所述中式硬帆升降的升降拉索,所述转向拉索、升降拉索与所述电动绞盘相连,所述控制系统通过所述伺服机构对飞艇及其他搭载设备进行统一控制。
12.优选地,所述飞艇本体包括吊舱,所述吊舱包括外挂式吊舱或内置式吊舱或半内置式吊舱。
13.一种带中式风帆的飞艇的使用方法,其特征包括以下步骤:起飞前打开所述阀门,令飞艇密闭舱内外相通;飞机连接飞艇外接连接装置后带动飞艇起飞;飞机通过电缆向飞艇电源系统供电或者飞机通过抽真空管道与飞艇管道连接;飞艇到达预定飞行高度后,关闭所述阀门,飞艇抽真空装置启动抽真空或者飞机抽真空装置通过所述抽真空管道为飞艇抽真空;直到飞艇获得的真空浮力等于自重,且飞艇展开风帆后,飞机与飞艇外接连接装置脱钩分离;飞艇与飞机分离后,所述抽真空装置由蓄电池供电继续抽真空,太阳能发电装置和/或风力发电装置为蓄电池供电,飞艇依靠真空浮力和机翼升力继续上升到平流层或指定高度,飞艇利用中式风帆前进。
14.与现有技术相比,本使用方法无须在地面先行给飞艇抽真空或充氦气,对飞艇材料的耐压要求不高;飞艇从地面升空时由飞机拖曳或背负上升,无须飞艇本身的浮力或动力,在到达预定高度后,利用飞机的电力或者飞机上的抽真空装置对飞艇抽真空,飞艇自身可以不带抽真空设备,或者采用较小的蓄电池以及抽真空设备,减轻了自重;中式风帆利用各方向的风力推动飞艇前进。
附图说明
15.图1:带中式风帆的飞艇的正视示意图。
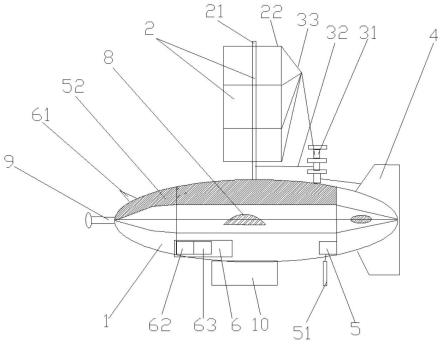
16.图2:带中式风帆的飞艇的侧视示意图。
17.图3:带中式风帆的飞艇的远程控制示意图。
具体实施方式
18.以下结合附图对本发明作进一步说明。
19.实施例1如图1图2所示,一种带中式风帆的飞艇,包括飞艇本体1,其特征为:所述飞艇本体1上安装有中式风帆2、控制系统、和电源系统5,所述中式风帆2包括桅杆21和中式硬帆22。
20.飞艇通过所述控制系统灵活调整所述中式硬帆22与风向的夹角,所述中式硬帆22在风的作用下,产生法向力,该法向力矢量分解为沿飞艇艇身纵向以及横向的两个分力,纵向分力推动飞艇行进,横向分力被飞艇较大的空气阻力抵消,使得所述中式风帆2可以灵活驾驭各方向风,推动飞艇前行。
21.相较于必须自带推进装置前进的飞艇,本实施例中的带中式风帆2的飞艇前进的装置包括自带推进装置和/或中式风帆2。
22.实施例2所述飞艇本体1包括机翼8、电动尾舵4、外接连接装置9以及密闭舱,所述机翼8安装于所述飞艇本体1两侧,所述电动尾舵4安装于所述飞艇本体1尾部,所述外接连接装置9安装于所述飞艇本体1上,所述密闭舱在所述飞艇本体1内部。
23.所述控制系统通过改变所述中式硬帆22与风的夹角以及电动尾舵4的方向调整飞艇的行进方向,所述机翼8在气流作用下产生升力;飞机通过外接连接装置9与飞艇连接,飞机采用拖曳缆绳连接或背负式连接带动飞艇。
24.实施例3所述电源系统5包括蓄电池、与所述蓄电池相连的太阳能发电装置52和/或风力发电装置51,所述蓄电池为飞艇的所有用电设备以及搭载设备供电。
25.所述蓄电池为飞艇及其搭载的设备供电,所述太阳能发电装置52和/或所述风力发电装置51产生的电力输送至所述蓄电池储存。
26.实施例4所述飞艇本体1包括安装于真空管道上的抽真空装置和阀门,所述真空管道一端与所述密闭舱相连,所述真空管道的另一端安装在飞艇外部。
27.所述阀门打开时,所述密闭舱内外连通,空气通过所述真空管道内外自由流动;所述阀门关闭后,所述抽真空装置工作,将密闭舱内的气体抽取到飞艇外,密闭舱内形成负压;作为优选方式,所述抽真空装置在完成抽真空后可以与飞艇分离以减轻飞艇重量。
28.实施例5所述外接连接装置(9)包括能与飞机相连的连接装置以及外接接口。
29.所述连接装置包括拖曳连接装置或固定连接装置,飞机通过拖曳连接装置用拖曳缆绳方式或通过固定连接装置用背负式方式带动飞艇飞行;所述外接接口包括电缆接口或抽真空管道接口,飞机连接飞艇后通过所述电缆接口为飞艇供电,无须耗费飞艇内部电力,飞机上的抽真空设备通过所述抽真空管道接口为飞艇抽真空。
30.实施例6所述密闭舱包括至少两个相互独立的密闭隔舱,每个所述密闭隔舱均包括所述真空管道、所述阀门以及所述抽真空装置。
31.为保证飞艇的安全性和增强飞艇的耐压性,所述密闭舱由至少两个相互独立的所述密闭隔舱组成,每个所述密闭隔舱均采用轻质材料,优选采用蜂窝结构,并可通过独立的所述阀门与外部连通,也可通过独立的所述抽真空装置在内部形成负压。
32.实施例7如图3所述控制系统包括智能自动控制系统6,所述智能自动控制系统6包括处理器63以及与所述处理器63相连的传感器61、通讯模块62以及伺服机构,所述通讯模块62通过5g/b5g和/或卫星互联网通讯模式与远程控制中心7通讯。
33.所述智能自动控制系统6通过所述传感器61获得飞艇高度、速度、方向、位置等信息和相关外部信息,由所述处理器63经计算处理后,自动输出相应指令到伺服机构控制飞艇完成相应动作;所述通讯模块62可以将飞艇相关信息传送至所述远程控制中心7,也可以接受所述远程控制中心7的指令,输送至智能控制系统6,实现远程控制。
34.实施例8所述控制系统包括控制所述中式硬帆22的电动拉索绞盘31、控制所述中式硬帆22方向转动的转向拉索32以及控制所述中式硬帆22升降的升降拉索33,所述转向拉索32、升降拉索33与所述电动绞盘31相连,所述控制系统通过所述伺服机构对飞艇及其他搭载设备进行统一控制。
35.所述控制系统通过所述伺服机构对飞艇及其搭载设备进行统一协调和控制,本实施例通过所述电动拉索绞盘31、转向拉索32、升降拉索33是控制所述中式硬帆22的方向和升降是一种优选方式,也可以通过带传动、齿轮传动、链传动或蜗杆传动方式实现对中式硬帆22的方向和升降的控制。
36.实施例9所述飞艇本体1包括吊舱10,所述吊舱10包括外挂式吊舱或内置式吊舱或半内置式吊舱。
37.所述吊舱10根据需要可以搭载不同载荷,遂行载人、侦察、打击、导航、通信或运输等不同任务。
38.实施例10上述一种带中式风帆的飞艇的使用方法,其特征包括以下步骤:起飞前打开阀门,令飞艇密闭舱内外相通;飞机连接飞艇外接连接装置9后带动飞艇起飞;飞机通过电缆向飞艇电源系统5供电或者飞机通过抽真空管道与飞艇抽真空管道接口连接;飞艇到达平流层或指定高度后,关闭所述阀门,飞艇抽真空装置启动抽真空或者飞机抽真空装置通过所述抽真空管道为飞艇抽真空;直到飞艇获得的真空浮力等于自重,且飞艇展开风帆后,飞机与飞艇外接连接装置脱钩分离;飞艇与飞机分离后,所述抽真空装置由蓄电池供电继续抽真空,太阳能发电装置和/或风力发电装置为蓄电池供电,飞艇依靠真空浮力和机翼升力继续上升到平流层或指定高度,飞艇利用中式风帆飞行。
39.本中式风帆的飞艇的升空分为三阶段:阶段一:飞艇起飞时,所述阀门打开,所述密封舱内外无压差,飞艇无须依靠本身空气浮力起飞,飞机通过所述外接连接装置和飞艇连接后,拖曳或背负飞艇起飞阶段二:飞机拖曳或背负飞艇到指定高度后,飞机通过电缆给飞艇的所述抽真空装置供电抽真空和/或利用飞机的抽真空装置通过管道为飞艇抽真空,待飞艇获得的真空浮力克服重力时,飞机和飞艇脱离连接;阶段三: 飞艇脱离飞机后利用所述中式风帆2向预定方向前进;飞艇所述蓄电池为抽真空装置供电继续抽真空,同时飞艇的机翼在气流的作用下产生升力,帮助飞艇继续上升到平流层或指定高度。
40.飞艇到达平流层或指定高度后,就可以通过控制系统调控中式风帆利用平流层的持续风力飞行并控制抽真空装置及能源保障系统,保持浮力,实现无限时滞空、无人巡航和遂行各种任务的目的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1