一种带增升装置的多自由度扑翼飞行器
1.本发明涉及飞行器技术领域,尤其涉及一种带增升装置的多自由度扑翼飞行器。
背景技术:
2.扑翼飞行器是基于仿生学原理,模仿鸟类、昆虫或蝙蝠等飞行生物的飞行方式而设计的一种飞行器。研究表明,扑翼飞行器有着特殊的高升力产生机制,非定常流场和低雷诺数下具有出色的飞行能力,相对传统的固定翼和旋翼飞行器,扑翼飞行器具有机动性灵活、飞行效率高、能耗低、隐蔽性好等独特优势,可广泛应用于军事和民用领域。
3.模仿鸟类的多自由度扑翼飞行器,鸟类在飞行时,其翅膀的运动方式主要有以下三种:拍打、折叠和扭转。从空气动力学的角度看,纯拍打运动产生的升力很小,飞行器所携带的载荷有限;如果加上扭转运动,升力虽然会提高,但是这种仿鸟扑翼飞行器的结构会变得复杂,制作、组装、稳定性都会存在很大问题。如果是拍打+折叠运动的组合,那么机翼在向上扑动的过程中,机翼的迎风投影面积会减小,产生的负升力减少;机翼在下拍过程中,其迎风投影面积会增大,产生的正升力会增加;因此,在机翼的一个运动周期内产生的净升力会大大提高。另外,如果能够加快上扑行程,延长下拍行程,那么机翼产生的升力会得到进一步提高。
4.现有的扑翼飞行器多为单段式扑翼飞行器,无法高度模仿大中型鸟类飞行动作,仿生性不强,气动效率低,机动灵活性差。
技术实现要素:
5.本发明主要解决现有的单段式扑翼飞行器,无法高度模仿大中型鸟类飞行动作,仿生性不强,气动效率低,机动灵活性差的技术问题,提出一种带增升装置的多自由度扑翼飞行器,以为飞行器提供稳定的升力,减小空气阻力,并更好地模仿鸟类的飞行运动。
6.本发明提供了一种带增升装置的多自由度扑翼飞行器,包括:头部1、机架2、机身外壳3、扑翼驱动机构4、蜗轮蜗杆机构8、尾翼装置9以及安装在机架2两侧的扑翼机构;
7.所述机架2,包括:前骨架结构件21、第一骨架结构件22、第二骨架结构件23、中间连接杆24和尾部连接杆26;
8.所述中间连接杆24插入头部1的后端;所述中间连接杆24上从前向后依次设置前骨架结构件21、第一骨架结构件22、第二骨架结构件23;所述中间连接杆24的末端与尾部连接杆26的前端连接;所述第一骨架结构件22和第二骨架结构件23的底部两侧分别设置固定轴25;
9.所述机身外壳3套在机架2上,位于头部1与尾翼装置9之间;
10.所述扑翼驱动机构4,包括:电机42、电机小齿轮41、电机小齿轮支座411、大直齿齿轮43、小直齿齿轮431、二级齿轮和摇臂;
11.所述二级齿轮的数量为两个,分别安装在对应的固定轴25上,且两个二级齿轮之间啮合;
12.所述电机42安装在第一骨架结构件22和第二骨架结构件23之间,且电机42的输出轴从第二骨架结构件23中伸出,所述电机42的输出轴贯穿小直齿齿轮431并与小直齿齿轮431连接;所述小直齿齿轮431与大直齿齿轮43啮合;所述大直齿齿轮43与其中一个二级齿轮同轴连接;
13.所述摇臂的数量为两个,分别安装在固定轴25上;所述摇臂与对应的扑翼机构连接;
14.所述扑翼机构,包括:内翼54和外翼6;
15.所述内翼54的内侧与摇臂连接,所述内翼54的外侧与外翼6连接;所述内翼54上设置增升装置7;
16.所述蜗轮蜗杆机构8安装在尾部连接杆26上,并与中间连接杆24连接;
17.所述尾翼装置9安装在尾部连接杆26上,位于机架2的尾部。
18.优选的,所述头部1采用流线型,仿生鸟类头部。
19.优选的,所述中间连接杆24与尾部连接杆26之间通过圆柱销轴27配合连接。
20.优选的,所述内翼54内部具有上内翼杆541、下内翼杆542、内翼骨架543、第一副翼杆544;
21.所述上内翼杆541和下内翼杆542上下对应设置,所述上内翼杆541通过摇杆51与摆杆5连接;
22.所述下内翼杆542通过翅膀固定件52与摆杆5连接;所述摆杆5与扑翼驱动机构4的摇臂连接;
23.所述第一副翼杆544通过第一副翼杆固定片545与翅膀连杆53的末端连接;
24.所述翅膀连杆53贯穿前骨架结构件21、第一骨架结构件22、第二骨架结构件23;
25.所述上内翼杆541和第一副翼杆544上固定有内翼骨架543。
26.优选的,所述外翼6内部具有外翼杆62和第二副翼杆64;
27.所述外翼杆62通过三角形铰接架61与上内翼杆541和下内翼杆542连接;
28.所述第二副翼杆64通过第二副翼杆固定片641和第三副翼杆固定片642与第一副翼杆544连接;
29.所述外翼杆62和第二副翼杆64上等间距设置多根外翼骨架63。
30.优选的,所述增升装置7采用止回阀。
31.优选的,所述止回阀包括中心圆盘帽,所述中心圆盘帽上具有孔口;
32.所述中心圆盘帽由三个s梁支撑。
33.优选的,所述蜗轮蜗杆机构8,包括:摇臂杆81、u型件82、蜗轮蜗杆电机83和箱体84;
34.所述蜗轮蜗杆电机83和u型件82分别安装在箱体84上;
35.所述u型件82的数量为两个,两个u型件82与所述机架2的尾部连接杆26固定连接;
36.所述摇臂杆81的一端贯穿机架2的中间连接杆24,所述摇臂杆81的另一端与蜗轮蜗杆电机83的输出轴连接。
37.优选的,所述尾翼装置9,包括:尾翼舵机支座91、两个尾翼舵机92、两个十字连接件93、舵机支撑板94、舵机连接杆95、两个尾翼摇臂96、两个尾翼拉杆97、两个小圆柱销98、设置在机架尾部的尾翼99;
38.所述尾翼舵机支座91上平面设有凹槽;
39.所述十字连接件93上端与机架2的尾部连接杆26连接,所述十字连接件93下端与舵机连接杆95并位于尾翼舵机支座91的凹槽内;
40.所述尾翼舵机92设置在尾翼舵机支座91上,并对称于尾部连接杆26的两侧;所述舵机支撑板94支撑两个尾翼舵机92,并与尾翼舵机支座91平行设置;
41.所述尾翼舵机92的输出端与尾翼摇臂96连接,两个尾翼摇臂96分别与两个尾翼拉杆97铰接相连;
42.所述尾翼拉杆97通过小圆柱销98与尾翼99固定连接;
43.所述尾翼99的前端中部与尾部连接杆26的末端连接。
44.本发明提供的一种带增升装置的多自由度扑翼飞行器,具有以下优点:
45.1、通过在扑翼飞行器的内翼上安装增升装置,止回阀的增升装置机构无需专用驱动机构,结构简单、紧凑,能够为飞行器提供稳定的升力,更有利于飞行,进一步提高扑翼飞行器的飞行能力。
46.2、扑翼机构基于鸟类翅膀的特点,将单侧扑翼分为内翼和外翼两个部分,通过扑翼连杆机构,实现两部分扑翼的差动,达到被动展向变形的目的,即上扑过程中减少扑翼的迎风投影面积,下拍过程中增大扑翼的迎风投影面积,从而增加一个扑动周期内的升力,能够提高传动效率,减小空气阻力并且也能够更好地模仿鸟类的飞行运动。采用曲柄摇杆机构实现扑动运动,降低传动机构的复杂度,减轻结构重量;扑翼飞行器气动效率高,可靠性强。
47.3、扑翼驱动机构中两个二级齿轮大小结构完全相同,使得左右两侧扑翼机构的运动不存在相位差,消除了不平衡的转向力矩,提高了扑翼飞行的稳定性。采用二级齿轮减速装置,大幅度提高输出扭矩,降低转速,使扑翼机构更好地符合仿生学大中型鸟类扑动频率的要求。
48.4、采用蜗轮蜗杆机构实现扑翼飞行器的俯仰运动,使仿生扑翼飞行器具有传动比例大的特点,同时也避免产生体积过大的问题,具有占用空间小,结构简便的优点。
49.5、通过两个尾翼舵机的同向转动,带动尾翼相对于机架进行左右摆动,控制横向稳定性,可实现带增升装置的多自由度扑翼飞行器的尾翼运动。
附图说明
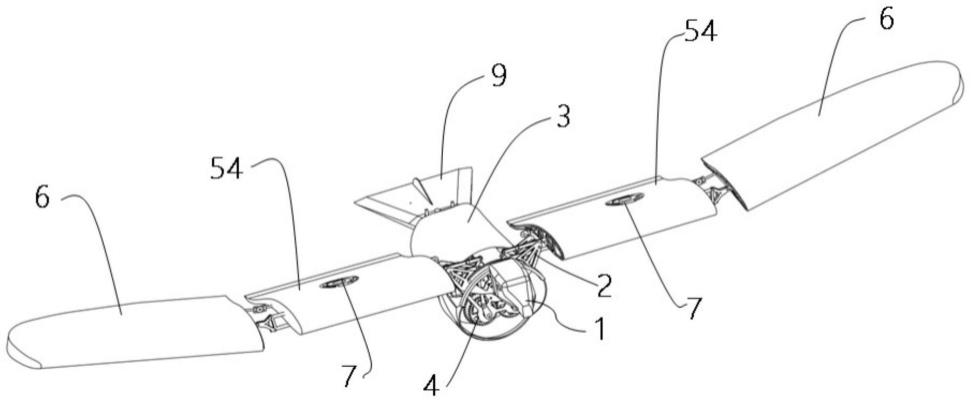
50.图1为本发明提供的带增升装置的多自由度扑翼飞行器的整体结构示意图;
51.图2为本发明提供的带增升装置的多自由度扑翼飞行器的机架的结构示意图;
52.图3为本发明提供的带增升装置的多自由度扑翼飞行器的扑翼驱动机构的正视结构示意图;
53.图4为本发明提供的带增升装置的多自由度扑翼飞行器的扑翼驱动机构的左视结构示意图;
54.图5为本发明提供的带增升装置的多自由度扑翼飞行器的扑翼机构的结构示意图;
55.图6为本发明提供的带增升装置的多自由度扑翼飞行器的增升装置的结构示意图;
56.图7为本发明提供的带增升装置的多自由度扑翼飞行器的蜗轮蜗杆机构的结构示意图;
57.图8为本发明提供的带增升装置的多自由度扑翼飞行器的尾翼装置的结构示意图。
58.附图标记:1-头部;2-机架;21-前骨架结构件;22-第一骨架结构件;23-第二骨架结构件;24-中间连接杆;25-固定轴;26-尾部连接杆;27-圆柱销轴;3-机身外壳;4-扑翼驱动机构;41-电机小齿轮;411-电机小齿轮支座;42-电机;43-大直齿齿轮;431-小直齿齿轮;44-左端二级齿轮;441-右端二级齿轮;45-第一滚动轴承;451-第二滚动轴承;46-左侧摇臂;461-右侧摇臂;5-摆杆;51-摇杆;52-翅膀固定件;53-翅膀连杆;54-内翼;541-上内翼杆;542-下内翼杆;543-内翼骨架;544-第一副翼杆;545-第一副翼杆固定片;6-外翼;61-三角形铰接架;62-外翼杆;63-外翼骨架;64-第二副翼杆;641-第二副翼杆固定片;642-第三副翼杆固定片;7-增升装置;8-蜗轮蜗杆机构;81-摇臂杆;82-u型件;83-蜗轮蜗杆电机;84-箱体;85-蜗轮蜗杆;9-尾翼装置;91-尾翼舵机支座;92-尾翼舵机;93-十字连接件;94-舵机支撑板;95-舵机连接杆;96-尾翼摇臂;97-尾翼拉杆;98-小圆柱销;99-尾翼。
具体实施方式
59.为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部内容。
60.如图1所示,本发明实施例提供的带增升装置的多自由度扑翼飞行器,包括:头部1、机架2、机身外壳3、扑翼驱动机构4、蜗轮蜗杆机构8、尾翼装置9以及安装在机架2两侧的扑翼机构。
61.所述头部1采用流线型,最大程度的仿生鸟类头部。
62.所述机架2,包括:前骨架结构件21、第一骨架结构件22、第二骨架结构件23、中间连接杆24和尾部连接杆26;
63.如图2所示,所述中间连接杆24插入头部1的后端,具体的,所述中间连接杆24插入头部1的后端圆孔内过盈配合。所述中间连接杆24上从前向后依次设置前骨架结构件21、第一骨架结构件22、第二骨架结构件23;所述中间连接杆24的末端与尾部连接杆26的前端连接;所述第一骨架结构件22和第二骨架结构件23的底部两侧分别设置固定轴25;所述中间连接杆24与尾部连接杆26之间通过圆柱销轴27配合连接。
64.所述机身外壳3套在机架2上,位于头部1与尾翼装置9之间。机架2的前骨架结构件21、第一骨架结构件22、第二骨架结构件23露出在机身外壳3外部。
65.所述扑翼驱动机构4,包括:电机42、电机小齿轮41、电机小齿轮支座411、大直齿齿轮43、小直齿齿轮431、二级齿轮和摇臂;
66.所述二级齿轮的数量为两个,分别安装在对应的固定轴25上,且两个二级齿轮之间啮合;具体的,如图3所示,二级齿轮分别为左端二级齿轮44和右端二级齿轮441,左端二级齿轮44和右端二级齿轮441大小、结构完全相同,左端二级齿轮44和右端二级齿轮441之间啮合。
67.如图4所示,所述电机42安装在第一骨架结构件22和第二骨架结构件23之间,所述电机42具体通过电机小齿轮支座411安装在第一骨架结构件22上。且电机42的输出轴从第二骨架结构件23中伸出,所述电机42的输出轴贯穿小直齿齿轮431的中心孔并与小直齿齿轮431连接,小直齿齿轮431能够随着电机42的输出轴转动;所述小直齿齿轮431与大直齿齿轮43啮合;所述大直齿齿轮43与其中一个二级齿轮同轴连接;
68.所述摇臂的数量为两个,分别安装在固定轴25上;所述摇臂与对应的扑翼机构连接。摇臂能够随着固定轴25转动。摇臂46具体是左侧摇臂46和右侧摇臂461;左侧摇臂46和右侧摇臂461对应与左右两根固定轴25固定连接,位于沿扑翼飞行器朝向前骨架结构件21方向。
69.具体的,左侧的固定轴25上分别设置第一滚动轴承45和第二滚动轴承451,第一滚动轴承45外圈穿过固定轴25固定在第一骨架结构件22前端,并装入第一骨架结构件22的左侧大圆孔进行过盈配合。第二滚动轴承451外圈穿过左侧固定轴25固定在第二骨架结构件23后端,并装入第二骨架结构件23的左侧大圆孔进行过盈配合。右侧的固定轴25上分别设置第三滚动轴承和第四滚动轴承;第三滚动轴承外圈穿过右侧的固定轴25固定在第一骨架结构21件前端,并装入第一骨架结构件22的右侧大圆孔进行过盈配合;第四滚动轴承外圈穿过右侧固定轴固定在第二骨架结构件22后端,并装入第二骨架结构件22的右侧大圆孔进行过盈配合。
70.所述扑翼机构在机架2两侧对应设置,且均为一一对应。右侧扑翼机构的结构与左侧扑翼机构完全相同,并按照对称的方式进行安装。
71.如图5所示,所述扑翼机构,包括:内翼54和外翼6;所述内翼54的内侧与摇臂连接,所述内翼54的外侧与外翼6连接;所述内翼54上设置增升装置7。
72.所述内翼54内部具有上内翼杆541、下内翼杆542、内翼骨架543、第一副翼杆544。所述上内翼杆541和下内翼杆542上下对应设置,所述上内翼杆541通过摇杆51与摆杆5连接。
73.所述下内翼杆542通过翅膀固定件52与摆杆5连接;所述摆杆5与扑翼驱动机构4的摇臂连接;具体的,所述摆杆5上端与摇杆51同轴连接,所述摆杆5中上端与翅膀固定件52同轴连接,所述摆杆5下端与所述扑翼驱动机构4的摇臂铰接。摇杆51和翅膀固定件52均可设置两个。
74.所述第一副翼杆544通过第一副翼杆固定片545与翅膀连杆53的末端连接;所述翅膀连杆53贯穿前骨架结构件21、第一骨架结构件22、第二骨架结构件23;
75.所述上内翼杆541和第一副翼杆544上固定有内翼骨架543。具体的,内翼骨架543固定在内翼54上且位于靠近机架2的位置,内翼骨架543的大圆孔与上内翼杆541固定连接,小圆孔与第一副翼杆544固定连接。
76.在本实施例中,驱动电机42带动齿轮旋转,齿轮带动摇臂旋转,进而带动两侧扑翼的摆杆5做上下运动,带动上内翼杆541、第一副翼杆544、下内翼杆542及内翼骨架543绕着摆杆5的转动支承处上下扑动,进而实现通过扑翼主动运动产生升力和推力。
77.所述外翼6内部具有外翼杆62和第二副翼杆64;所述外翼杆62通过三角形铰接架61与上内翼杆541和下内翼杆542连接。所述第二副翼杆64通过第二副翼杆固定片641和第三副翼杆固定片642与第一副翼杆544连接。具体的,第二副翼杆固定片641与第一副翼杆
544左端固定连接,第三副翼杆固定片642与第二副翼杆64固定连接,第一副翼杆544与第二副翼杆64通过第二副翼杆固定片641和第三副翼杆固定片642铰接相连。所述铰接架61为三角形形状,其一角与外翼杆62一端连接,另外两角分别与上内翼杆541和下内翼杆542相连接。
78.所述外翼杆62和第二副翼杆64上等间距设置多根外翼骨架63。具体的,三个外翼骨架63等距间隔设置,外翼骨架63的圆孔与外翼杆62固定连接,外翼骨架63的后端与第二副翼杆64搭接。另外,所述扑翼机构具有包覆于内翼54和外翼6的包覆件,类似于机翼的蒙皮结构。
79.如图5所示,为了提高内翼54和外翼6的结构刚性和稳定性,在所述摇杆51上固定连接有沿扑翼飞行器头尾方向设置的翅膀连杆53,所述翅膀连杆53靠近扑翼飞行器头部1的一端固定前骨架结构件21,翅膀连杆53沿扑翼飞行器尾部的一端固定连接有与所述摇杆51平行的第一副翼杆固定片545;第一副翼杆固定片545另一端与上内翼杆541外端之间连接有贯穿内翼骨架543的第一副翼杆544。通过两个摇杆51、两个翅膀固定件52、第一副翼杆固定片545和第一副翼杆544提高内翼54的结构刚性和稳定性。
80.在本实施例中,每个扑翼机构包括了内翼、外翼形成的两段式的扑翼结构,实现了扑动和折叠动作,更好地模拟了鸟类飞行时的翅膀运动,提高了扑翼飞行器的升力。
81.所述增升装置7采用止回阀。如图6所示,所述止回阀包括中心圆盘帽,所述中心圆盘帽上具有孔口;所述中心圆盘帽由三个s梁支撑。止回阀可以在中心圆盘帽处避免共振,止回阀7对称安装在机架2两侧的扑翼机构内翼54的包覆件上。止回阀是被动的,它不需要外部电源额外启动,流经止回阀的空气流向为从中心孔流向阀瓣盖的外侧,并在内翼54上拍期间打开;出于这个原因,止回阀贯穿内翼54的包覆件,在扑翼上拍过程中进气从上到下流动,因此阀盘盖被打开以增大升力。
82.所述蜗轮蜗杆机构8安装在尾部连接杆26上,并与中间连接杆24连接。如图7所示,所述蜗轮蜗杆机构8,包括:摇臂杆81、u型件82、蜗轮蜗杆电机83、箱体84和蜗轮蜗杆85。所述蜗轮蜗杆电机83和u型件82分别安装在箱体84上;所述u型件82的数量为两个,两个u型件82与所述机架2的尾部连接杆26固定连接;所述摇臂杆81的一端贯穿机架2的中间连接杆24,所述摇臂杆81的另一端与蜗轮蜗杆电机83的输出轴连接。
83.所述尾翼装置9安装在尾部连接杆26上,位于机架2的尾部。如图8所示,所述尾翼装置9,包括:尾翼舵机支座91、两个尾翼舵机92、两个十字连接件93、舵机支撑板94、舵机连接杆95、两个尾翼摇臂96、两个尾翼拉杆97、两个小圆柱销98、设置在机架尾部的尾翼99。
84.所述尾翼舵机支座91上平面设有凹槽;所述十字连接件93上端与机架2的尾部连接杆26连接,所述十字连接件93下端与舵机连接杆95并位于尾翼舵机支座91的凹槽内,十字连接件93数量为两个。具体的,十字连接件93上端的圆孔贯穿机架2的尾部连接杆26并与之固定连接,十字连接件93下端的圆孔贯穿舵机连接杆95并位于尾翼舵机支座91的凹槽内。
85.所述尾翼舵机92设置在尾翼舵机支座91上,并对称于尾部连接杆26的两侧;所述舵机支撑板94支撑两个尾翼舵机92,并与尾翼舵机支座91平行设置;所述尾翼舵机92的输出端与尾翼摇臂96连接,两个尾翼摇臂96分别与两个尾翼拉杆97铰接相连;所述尾翼拉杆97通过小圆柱销98与尾翼99固定连接;所述尾翼99的前端中部与尾部连接杆26的末端连
接,所述尾翼99用于加强飞行时的稳定性。
86.在本实施例中,两个尾翼舵机92的同向转动,使两个尾翼摇臂96带动铰接在尾翼摇臂96上的两个尾翼拉杆97作左右转动,进而带动固定在尾翼99上的两个小圆柱销98作左右转动,带动尾翼99相对于机架2左右摆动,实现了尾翼99的摇摆,尾翼装置9能够配合左右扑翼机构做出各种飞行动作,并且改变扑翼飞行器的飞行方向。
87.本发明带增升装置的多自由度扑翼飞行器的工作原理:首先驱动电机42工作,小直齿齿轮431与大直齿齿轮43啮合,改变转矩方向并减速提高转矩大小,大直齿齿轮43通过左侧的固定轴25将转矩传递给左端二级齿轮44,继而传递给与左端二级齿轮44相啮合的右端二级齿轮441,实现二次减速,为扑翼运动提供转矩。扑翼驱动机构4的摇臂带动左右两侧扑翼机构的摆杆5转动,通过摆杆5将摇臂的转动转变为翅膀的上下往复运动,从而带动扑翼的运动,进而使扑翼飞行器产生扑动-俯仰-折叠的三自由度的运动升力。
88.本发明带增升装置的多自由度扑翼飞行器的驱动过程:使电机42、蜗轮蜗杆电机83、两个尾翼舵机92通电之后,电机42的转轴输出扭矩传递到小直齿齿轮431上,使小直齿齿轮431整圈转动,通过齿轮啮合作用,带动大直齿齿轮43整圈转动,因为大直齿齿轮43与左端二级齿轮44通过所述机架2的左侧的固定轴25固定连接,因此大直齿齿轮43带动左端二级齿轮44整圈转动,通过齿轮啮合作用,带动右端二级齿轮441整圈转动;因为安装在机架2两侧的左右扑翼机构的摆杆5与扑翼驱动机构4的摇臂相连接,因此,随着齿轮转动,带动摇臂整圈转动的同时带动摆杆5转动,进而带动扑翼机构做上下摆动,即模仿鸟类翅膀的扑动动作;因为左右两侧扑翼机构分为内翼54和外翼6两部分,左右两侧扑翼机构外翼6的运动与内翼54的运动存在相位差,内翼54向上运动时,外翼6朝向内翼54折叠,左右两侧扑翼机构的迎风投影面积减少;内翼54向下运动时,外翼6背向内翼54伸展,左右两侧扑翼机构的迎风投影面积增加。蜗轮蜗杆电机83通电后,蜗轮蜗杆电机83的输出轴输出扭矩传递到蜗轮蜗杆机构8的摇臂杆81上,因为蜗轮蜗杆机构8的摇臂杆81与机架2的中间连接杆24固定连接,所以带动机架2的中间连接杆24做俯仰运动,进而带动整个扑翼飞行器前半部分做俯仰运动,即模仿鸟类的俯仰动作。两个尾翼舵机92启动时,通过两个尾翼拉杆97对设置在机架尾部的尾翼99产生力矩,使尾翼99左右摆动,控制横向稳定性。
89.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1