一种远程空地智能无人安检机
1.本发明涉及防暴安检领域,具体涉及一种远程空地智能无人安检机。
背景技术:
[0002][0003]
毫米波成像技术被逐渐运用到安检领域,该技术能够实现较远距离对可疑人员和物品进行检查识别,具备分辨率适中,成像清晰度合适,对人体影响较小等特点,近年来近距离安检成像技术得到了高速发展,但是远距离安全检查设备没有针对用于防暴安检等任务专门设计的产品。
[0004]
本发明通过采用毫米波主动式远程安检仪与智能无人机系统组合的方式,使得该机器可在空中或者地面远程开展安检工作;通过无人驾驶系统,控制该安检机器自动巡查,穿梭于人群间,主动发现危险目标;毫米波主动式远程安检仪安装于可旋转支撑杆上,从而可以通过旋转实现空中与地面两种安检功能,满足不同巡查角度的要求;由于伸缩杆通过液压传动可上下方向伸缩,毫米波主动式远程安检仪可检查范围进一步增大;该安检机器可采用飞行方式与空中开展安检,可快速抵达需要安检的地点,并可于空中完成远程安检工作;多台安检机器组合使用,协同作业,可构成空地一体的安检系统,大幅提升安检效率与准确率,形成真正的“天罗地网”,使犯罪分子等危险人物无处容身;该安检机器安装有摄像头与扬声器,可以通过摄像头采集危险人物图像,并借助人工智能技术,迅速获取危险人物信息,对于有必要的情况,安保人员可通过扬声器远程喊话的形式劝说危险人物放弃犯罪行动。
[0005]
中国专利109901610a和109901438a先后报道了两种用于安防的高空搜索装置;均采用无人机作为作业平台,通过在无人机上加装云台及摄像头来进行高空搜索安防工作。中国专利cn105739512a报道了一种无人机自动巡检系统,采用计算机视觉技术,并采用自动控制技术,使无人机实现自动巡检。
[0006]
但专利109901610a,109901438a及cn105739512a有三个共同的技术缺陷:仅采用摄像头来进行安防识别,无法判别危险人物身上是否携带枪支等危险物品;仅能实现空中安防识别,无法在地面实现安防巡逻功能,无法实现空地协同作业;仅作为监控平台使用,无法进行喊话等工作。
技术实现要素:
[0007]
有鉴于此,本发明的主要目的在于提供了一种远程空地智能无人安检机,既解决了防暴安检距离及范围问题,也解决了安检机器空地协同问题,解决了需要人工手动安检的问题,并利用可飞行优势,无人机可快速到达安检地点,通过加装扬声器等外部装备,可实现喊话等功能。
[0008]
本技术提供了一种远程空地智能无人安检机,包括:
[0009]
包括:旋翼、旋翼支架、机体、车轮、毫米波主动式远程安检仪、伸缩杆、第一支撑
杆、第二支撑杆、激光雷达、摄像头、扬声器;所述旋翼支架安装在机体顶部,旋翼安装在旋翼支架上;所述第一支撑杆固定在机体前端,第二支撑杆通过铰接方式与第一支撑杆连接,伸缩杆安装于第二支撑杆顶端;所述车轮安装在机体底部;所述毫米波主动式远程安检仪固定于伸缩杆顶端;所述激光雷达安装在机体顶部,摄像头安装在机体上方,扬声器安装在机体前端。
[0010]
由上,本发明从在空中与地面协同采用毫米波主动式远程安检仪开展安检的角度出发,采用无人机机体作为载体,并采用自动驾驶及人工智能技术,使远程空地智能无人安检机具备空中与地面自动安检巡航的功能,既解决了防暴安检距离及范围问题,也解决了安检机器空地协同问题,解决了需要人工手动安检的问题,并利用可飞行优势,可快速到达安检地点,通过加装扬声器等外部装备,可实现喊话等功能,且多台远程空地智能无人安检机可采取地-地、地-空、空-空多种联合作业方式。
[0011]
可选的,所述机体可以安装多个毫米波主动式远程安检仪。
[0012]
由上,多个毫米波主动式远程安检仪可以提高无人机的安检范围。
[0013]
可选的,所述毫米波主动式远程安检仪可以为球型或其他形状的毫米波主动式远程安检仪。
[0014]
由上,无人机可以装配不同类型的毫米波主动式远程安检仪。
[0015]
可选的,所述车轮也可采用履带方式。
[0016]
由上,履带和车轮可以使无人机在不同的地形工作。
[0017]
可选的,所述摄像头为多个,安装在机体的不同位置。
[0018]
由上,多个摄像头可以使无人机安检范围大大提高。
[0019]
可选的,所述旋翼支架为四个,每个旋翼支架上安装一个旋翼,且旋翼支架和旋翼均可折叠和旋转。
[0020]
由上,当所述无人机在天空工作时,将旋翼支架和旋翼展开,可以方便无人机升空;当所述无人机在地面工作时,将旋翼支架和旋翼折叠,可以防止无人机工作时误伤他人。
[0021]
可选的,所述第二支撑杆和伸缩杆通过液压、机械传动、气动等驱动方式转动来带动毫米波主动式远程安检仪转动。
[0022]
由上,毫米波主动式远程安检仪和伸缩杆可以跟随第二支撑杆上下转动,这样既可以增加无人机的安检范围,满足不同巡查角度的要求,同时也可以防止无人机下降时毫米波主动式远程安检仪砸向地面毁坏装置。
[0023]
可选的,所述第二支撑杆与第一支撑杆所述铰接,还包括:第二支撑杆装配于一电机输出轴上,通过该电机驱动所述第二支撑杆沿所述铰接转动。所述伸缩杆包括:所述伸缩杆为气缸驱动式伸缩杆。
[0024]
可选的,还包括控制单元,用于控制所述安检机为飞行状态时,通过所述电机、所述气缸使所述毫米波主动式远程安检仪低于所述安检机车轮;以及用于控制所述安检机为地面状态时,通过所述电机、所述气缸使所述毫米波主动式远程安检仪高于所述安检机车轮。
附图说明
[0025]
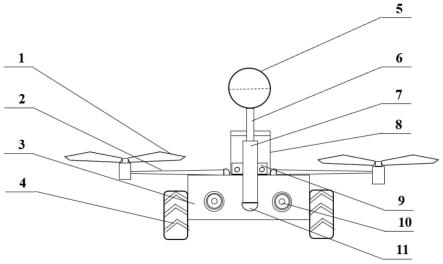
图1是远程空地智能无人安检机的正视图;
[0026]
图2是远程空地智能无人安检机的俯视;
[0027]
图3是远程空地智能无人安检机的轴侧视图;
[0028]
图4是远程空地智能无人安检机空中作业示意图;
[0029]
图5是远程空地智能无人安检机空地协同作业示意图;
[0030]
附图编号说明:旋翼1、旋翼支架2、机体3、车轮4、毫米波主动式远程安检仪5、伸缩杆6、第一支撑杆11、激光雷达8、摄像头9、扬声器10、第二支撑杆7。
具体实施方式
[0031]
在以下的描述中,涉及到“一些实施例”,其描述了所有可能实施例的子集,但是可以理解,“一些实施例”可以是所有可能实施例的相同子集或不同子集,并且可以在不冲突的情况下相互结合。
[0032]
在以下的描述中,所涉及的术语“第一\第二\第三等”或模块a、模块b、模块c等,仅用于区别类似的对象,不代表针对对象的特定排序,可以理解地,在允许的情况下可以互换特定的顺序或先后次序,以使这里描述的本发明实施例能够以除了在这里图示或描述的以外的顺序实施。
[0033]
在以下的描述中,所涉及的表示步骤的标号,如s110、s120
……
等,并不表示一定会按此步骤执行,在允许的情况下可以互换前后步骤的顺序,或同时执行。
[0034]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中所使用的术语只是为了描述本发明实施例的目的,不是旨在限制本发明。
[0035]
下面将结合附图,对本发明进行详细说明。
[0036]
【远程空地智能无人安检机实施例】
[0037]
下面参见图1示出的远程空地智能无人安检机的正视图、图2示出的远程空地智能无人安检机的俯视、图3示出的远程空地智能无人安检机的轴侧视图、图4示出的远程空地智能无人安检机空中作业示意图、图5示出的远程空地智能无人安检机空地协同作业示意图,对本发明进行详细说明。在本实施例中,远程空地智能无人安检机包括:
[0038]
旋翼1、旋翼支架2、机体3、车轮4、毫米波主动式远程安检仪 5、伸缩杆6、第一支撑杆11、第二支撑杆7、激光雷达8、摄像头、扬声器10;在一些实施例中,所述机体3可以安装多个毫米波主动式远程安检仪5。本发明从采用毫米波主动式远程安检仪5开展安检的角度出发,采用无人机机体3作为载体,并采用自动驾驶及人工智能技术,使远程空地智能无人安检机具备空中与地面自动安检巡航的功能,并利用可飞行优势,可快速到达安检地点,通过加装扬声器10 等外部装备,可实现喊话等功能,且多台远程空地智能无人安检机可采取地-地、地-空、空-空多种联合作业方式,同时也可以提高安检效率和安检范围。
[0039]
所述旋翼支架2安装在机体3顶部,旋翼1安装在旋翼支架2上;在一些实施例中,旋翼1旋转可以带动无人机升空。
[0040]
所述第一支撑杆11固定在机体3前端,第二支撑杆7通过铰接的连接方式与第一支撑杆11连接,伸缩杆6安装于第二支撑杆7顶端;在一些实施例中,所述第二支撑杆7和伸缩
杆6通过液压、机械传动、气动等驱动方式转动来带动毫米波主动式远程安检仪5转动。伸缩杆6通过液压传动可上下方向伸缩,同时带动毫米波主动式远程安检仪5转动,使毫米波主动式远程安检仪5可检查范围进一步增大。
[0041]
所述车轮4安装在机体3底部;在一些实施例中,所述车轮4也可采用履带方式。车轮4和履带可以使无人机在地面工作时可以适应更多的地形。
[0042]
所述毫米波主动式远程安检仪5固定于伸缩杆6顶端;在一些实施例中,所述毫米波主动式远程安检仪5可以为球型或其他形状的毫米波主动式远程安检仪5。当无人机在空中作业时,第二支撑杆7和收缩杆向下转动带动毫米波主动式远程安检仪5向下转动;当无人机在地面作业时,第二支撑杆7和收缩杆向上转动带动毫米波主动式远程安检仪5向上转动,毫米波主动式远程安检仪5安装于可旋转第二支撑杆7上,从而可以通过旋转实现空中与地面两种安检功能,满足不同巡查角度的要求,同时也可以防止无人机在空中作业完成后下降时毫米波主动式远程安检仪5砸向地面毁坏装置,且毫米波主动式远程安检仪5可以为多种形状。
[0043]
所述激光雷达8安装在机体3顶部,摄像头安装在机体3上方,扬声器10安装在机体3前端。对于有必要的情况,安保人员可通过扬声器10远程喊话的形式劝说危险人物放弃犯罪行动。
[0044]
在一些实施例中,所述摄像头为多个,安装在机体3的不同位置。通过摄像头可以采集危险人物图像,并借助人工智能技术,迅速获取危险人物信息,并且多个摄像头可以增大无人机安检的范围,提高工作效率。
[0045]
在一些实施例中,所述旋翼支架2为四个,每个旋翼支架2上安装一个旋翼1,且旋翼支架2和旋翼1均可折叠和旋转。当无人机在空中作业时,旋翼1和旋翼支架2展开,旋翼1在旋翼支架2上旋转带动无人机升空,当无人机在地面作业时,将旋翼1和旋翼支架2折叠到无人机机体3顶部,防止无人机移动时,旋翼1和旋翼支架2划伤他人。
[0046]
在一些实施例中,远程空地智能无人安检机亦可搭载其他设备,如打击武器等。
[0047]
在一些实施例中,所述第二支撑杆与第一支撑杆所述铰接,还包括:第二支撑杆装配于一电机输出轴上,通过该电机驱动所述第二支撑杆沿所述铰接转动。所述伸缩杆包括:所述伸缩杆为气缸驱动式伸缩杆。还包括控制单元,用于控制所述安检机为飞行状态时,通过所述电机、所述气缸使所述毫米波主动式远程安检仪低于所述安检机车轮;以及用于控制所述安检机为地面状态时,通过所述电机、所述气缸使所述毫米波主动式远程安检仪高于所述安检机车轮。
[0048]
【远程地空智能无人安检机工作原理】
[0049]
本实施的工作原理可如下:
[0050]
机器通过激光雷达8测距,并通过自动驾驶系统实现自动巡航,并可通过摄像头9拍摄危险人物画面,毫米波主动式远程安检仪55 可在伸缩杆6、第二支撑杆7及第一支撑杆11的带动下,实现转动与伸缩运动,扩大安检范围;
[0051]
在需要进行飞行安检作业时,可采用旋翼1等飞行装置带动无人机飞行,第二支撑杆7转动一定角度,使毫米波主动式远程安检仪5 向下方探测;
[0052]
在需要进行地面安检作业时,第二支撑杆7向上转动一定角度,使毫米波主动式远程安检仪5向左右探测,同时也要将旋翼1和旋翼支架2折叠,防止无人机在地面行走时会误
伤他人;
[0053]
在需要安保人员对危险人物进行喊话时,可采用机身搭载的扬声器10进行远程喊话。
[0054]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1