一种用于舱段与组件的对接系统的制作方法
1.本技术涉及飞行器零部件装配的技术领域,特别是一种用于舱段与组件的对接系统。
背景技术:
2.在航空航天工业生产制造中,飞行器零部件装配是航空航天工业中十分重要的一环,作为飞行器重要零件,飞行器舱段组件对接是确保飞行器制造配合精准性和公差一致性的重要一环。而人工装配所需要的操作时间已经满足不了生产厂家所需的生产效率,许多飞行器生产制造工厂都在投入大量的人力物力解决传统手工装配中存在的飞行器零部件装配质量较差、零部件的装配时间长、装配时工人的劳动强度大的问题。
技术实现要素:
3.本技术提供一种用于舱段与组件的对接系统,目的是实现舱段与组件在较高精度下的自动对接。
4.第一方面,提供了一种对接系统,所述对接系统用于实现第一对接件和第二对接件的对接,所述对接系统包括:
5.多自由度平台,用于在所述第一对接件和所述第二对接件的对接过程中,相对于第一方向、第二方向和第三方向调节所述第一对接件,所述第一方向、所述第二方向和所述第三方向相互正交,所述第一对接件和所述第二对接件的对接方向为所述第三方向;
6.第一距离检测装置,位于所述第一对接件的移动轨迹以外,且位于所述第二对接件的靠近所述第一对接件的一侧,所述第一距离检测装置用于检测所述第一距离检测装置与所述第一对接件在所述第一方向上的第一距离值,所述第一距离值用于指示所述多自由度平台在所述第一方向的偏移调节量;
7.第二距离检测装置,位于所述第一对接件的移动轨迹以外,且位于所述第二对接件的靠近所述第一对接件的一侧,所述第二距离检测装置用于检测所述第二距离检测装置与所述第一对接件在所述第二方向上的第二距离值,所述第二距离值用于指示所述多自由度平台在所述第二方向的偏移调节量。
8.与现有技术相比,本技术提供的方案至少包括以下有益技术效果:通过设置距离检测装置,可以在两个对接件对接过程中调节各个方位的装配间隙,实现两个对接件在较高精度下的自动对接,具备相对较高的对接效率。
9.结合第一方面,在第一方面的某些实现方式中,所述对接系统还包括:
10.第三距离检测装置,位于所述第一对接件的移动轨迹以外,且与所述第一距离检测装置相对于所述第二方向和第三方向构成的平面对称设置,所述第三距离检测装置用于检测所述第三距离检测装置与所述第一对接件在所述第一方向上的第三距离值,所述第一距离值和所述第三距离值用于指示所述多自由度平台在所述第一方向的偏移调节量和/或所述第二方向的偏转调节量。
11.通过对称设置两个距离检测装置,除了可以获得偏移调整量,还可以获得偏转调整量,增加两个对接件对接过程中的可调节自由度,使两个对接件更容易对接成功。
12.结合第一方面,在第一方面的某些实现方式中,所述第二距离检测装置位于所述第二方向和所述第三方向构成的平面,所述对接系统还包括:
13.第四距离检测装置和第五距离检测装置,均位于所述第一对接件的移动轨迹以外,所述第四距离检测装置和所述第五距离检测装置相对于所述第二方向和第三方向构成的平面对称设置,所述第四距离检测装置用于检测所述第四距离检测装置和所述第一对接件在所述第二方向上的第四距离值,所述第五距离检测装置用于检测所述第五距离检测装置和所述第一对接件在所述第二方向上的第五距离值,所述第二距离值、所述第四距离值和所述第五距离值用于指示所述多自由度平台在所述第二方向的偏移调节量、所述第三方向的偏转调节量。
14.通过在第一对接件的同侧设置两个对称的距离检测装置,并在第一对接件的另一侧设置距离检测装置,可以同时获得更多方向的偏移量和偏转调节量,增加两个对接件对接过程中的可调节自由度,使两个对接件更容易对接成功。
15.结合第一方面,在第一方面的某些实现方式中,所述第二距离检测装置位于所述第一距离检测装置、所述第三距离检测装置、所述第四距离检测装置和所述第五距离检测装置所在平面以外,所述第二距离值、所述第四距离值和所述第五距离值还用于指示所述多自由度平台在所述第一方向的偏转调节量。
16.通过将5个距离检测装置不共面设置,有利于使5个距离检测装置可以反映更多调节量,获得更多方向的偏转调节量,增加两个对接件对接过程中的可调节自由度,使两个对接件更容易对接成功。
17.结合第一方面,在第一方面的某些实现方式中,所述对接系统还包括:
18.第一光发射器和第一光接收器,所述第一光发射器发射的光用于穿过所述第一对接件和所述第二对接件的装配间隙射入所述第一光接收器,所述第一光发射器和所述第一光接收器的连线方向平行于所述第三方向,所述第一光发射器和所述第一光接收器的连线方向位于所述第二对接件的目标侧,所述第一光接收器用于输出第一光感应结果,所述第一光感应结果用于指示是否成功接收所述第一光发射器发出的光;
19.当所述第一光感应结果用于指示接收所述第一光发射器发出的光失败时,所述第一光感应结果用于指示所述多自由度平台朝着背离所述目标侧的方向调节所述第一对接件。
20.通过成对设置光发射器和光接收器,可以在两个对接件对接过程中实时捕捉两个对接件是否发生装配阻挡,并依据阻挡情况调节各个方位的装配间隙,除实现两个对接件在较高精度下的自动对接,还可以减少两个对接件在对接过程中发生严重磕碰的可能性。
21.结合第一方面,在第一方面的某些实现方式中,所述对接系统还包括:
22.第二光发射器和第二光接收器,所述第一光发射器和所述第二光发射器相对于所述第二方向和所述第三方向构成的平面对称设置,所述第一光接收器和所述第二光接收器相对于所述第二方向和所述第三方向构成的平面对称设置,所述第一光发射器和所述第二光发射器沿所述第一方向排列,所述第二光发射器发射的光用于穿过所述第二对接件和所述第二对接件的装配间隙射入所述第二光接收器,所述第二光发射器和所述第二光接收器
的连线方向平行于所述第三方向,所述第二光接收器用于输出第二光感应结果,所述第二光感应结果用于指示是否成功接收所述第二光发射器发出的光;
23.在所述第一光发射器和所述第二光发射器位于所述第二对接件的同侧的情况下,所述第一光感应结果和所述第二光感应结果用于指示所述多自由度平台在所述第二方向偏移和/或所述第三方向偏转调节所述第二对接件;
24.在所述第一光发射器和所述第二光发射器分别位于所述第二对接件的两侧的情况下,所述第一光感应结果和所述第二光感应结果用于指示所述多自由度平台在所述第一方向偏移和/或所述第二方向偏转调节所述第二对接件。
25.通过对称设置两组光发射器和光接收器,除了可以获得偏移调整量,还可以获得偏转调整量,增加两个对接件对接过程中的可调节自由度,使两个对接件更容易对接成功。两组光发射器和光接收器相对于第二对接件设置在不同的方位,可以获得不同方向上的偏移调整量和偏转调整量。
26.结合第一方面,在第一方面的某些实现方式中,所述对接系统还包括:
27.第三光发射器和第三光接收器,所述第三光发射器和所述第三光接收器设置在所述第二方向和所述第三方向构成的平面上,所述第三光发射器发射的光用于穿过所述第三对接件和所述第三对接件的装配间隙射入所述第三光接收器,所述第三光发射器和所述第三光接收器的连线方向平行于所述第三方向,所述第三光接收器用于输出第三光感应结果,所述第三光感应结果用于指示是否成功接收所述第三光发射器发出的光,所述第一光感应结果、所述第二光感应结果和所述第三光感应结果用于指示所述多自由度平台在所述第一方向偏转调节所述第二对接件。
28.通过在第二对称件的对称面上设置光发射器和光接收器,可以获得更多方向的偏移量和偏转调节量,增加两个对接件对接过程中的可调节自由度,使两个对接件更容易对接成功。
29.结合第一方面,在第一方面的某些实现方式中,所述第一对接件具有第一对接孔,所述第二对接件具有第二对接孔,当所述第一对接件与所述第二对接件装配完成时,所述第一对接孔和所述第二对接孔对齐;
30.所述对接系统还包括孔对接检测装置,所述孔对接检测装置与所述第二对接孔相对设置,用于检测所述第一对接孔和所述第二对接孔是否对齐。
31.通过检测对接孔的对接情况,可以实现在对接孔装配过程中实时调节第一对接件的姿态,使两个对接件更容易对接成功。
32.结合第一方面,在第一方面的某些实现方式中,所述对接系统还包括:
33.平移装置,所述平移装置用于搭载所述多自由度平台和所述第一对接件并朝向所述第二对接件移动。
34.通过设置平移装置,可以增大第一对接件在对接方向上的进给行程。
35.结合第一方面,在第一方面的某些实现方式中,所述平移装置还包括沿所述第三方向延伸的轨道,所述多自由度平台可在所述轨道上移动,以推动所述第一对接件朝向所述第二对接件移动。
36.平移装置上设置有轨道,可以减少多自由度平台偏移指定进给方向的可能性。
37.第二方面,提供了一种对接系统,所述对接系统用于实现第一对接件和第二对接
件的对接,所述对接系统包括:
38.多自由度平台,用于在所述第一对接件和所述第二对接件的对接过程中,相对于多个方向调节所述第一对接件;
39.第一光发射器和第一光接收器,所述第一光发射器发射的光用于穿过所述第一对接件和所述第二对接件的装配间隙射入所述第一光接收器,所述第一光发射器和所述第一光接收器的连线方向平行于所述第一对接件和所述第二对接件的对接方向,所述第一光发射器和所述第一光接收器的连线方向位于所述第二对接件的目标侧,所述第一光接收器用于输出第一光感应结果,所述第一光感应结果用于指示是否成功接收所述第一光发射器发出的光;
40.当所述第一光感应结果用于指示接收所述第一光发射器发出的光失败时,所述第一光感应结果用于指示所述多自由度平台朝着背离所述目标侧的方向调节所述第一对接件。
41.通过成对设置光发射器和光接收器,可以在两个对接件对接过程中实时捕捉两个对接件是否发生装配阻挡,并依据阻挡情况调节各个方位的装配间隙,除实现两个对接件在较高精度下的自动对接,还可以减少两个对接件在对接过程中发生严重磕碰的可能性。
附图说明
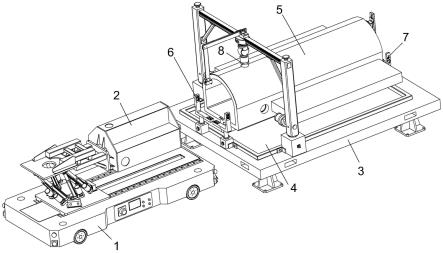
42.图1是本技术对接系统的总体结构示意图。
43.图2是本技术对接系统的平移装置的结构示意图。
44.图3是本技术对接系统的第一对接件的结构示意图。
45.图4是本技术对接系统的基座平台的结构示意图。
46.图5是本技术对接系统的局部结构示意图。
47.图6是本技术对接系统的检测框架的结构示意图。
48.图7是本技术对接系统的第二对接件对接系统的结构示意图。
49.图8是本技术对接系统的距离检测组件、光检测组件的装配示意图。
50.图9是本技术对接系统的孔对接检测组件的结构示意图。
51.图10是本技术对接系统的前端支架的结构示意图。
52.图11是本技术对接系统的顶部支架的结构示意图。
53.图12是本技术对接系统的尾部支架的结构示意图。
具体实施方式
54.下面结合附图和具体实施例对本技术作进一步详细的描述。
55.图1是本技术实施例提供的一种对接系统的示意性结构图。本技术实施例提供的对接系统可以实现第一对接件和第二对接件高精度自动对接。对接系统可以包括平移装置1、第一对接件2、基座平台3、检测框架4、第二对接件5、距离检测组件6、光检测组件7、孔对接检测组件8。在一些实施例中,第一对接件2可以为组件,第二对接件5可以为舱段。
56.如图1和图2所示,平移装置1可以搭载有多自由度平台14和第一对接件2,平移装置1可运动至基座平台3旁,使第一对接件2朝向第二对接件5移动,且第一对接件2可以大约正对第二对接件5。在一些实施例中,平移装置1可以为小车。
57.平移装置1上表面为一平台11,平台11上有两根导轨12和导轨13。导轨12和导轨13可以沿第一对接件2的进给方向延伸。第一对接件2的进给方向可以是第一对接件2和第二对接件5的对接方向(以下简称为y方向)。导轨12和13上有多自由度平台14,多自由度平台14可沿此两根导轨12和13运动,以此推动第一对接件2沿y方向移动。
58.多自由度平台14主要由数个液压缸141和一个位置可变化的竖直平台面142组成,此竖直平台面142与第一对接件2的前端面24配合在一起,多自由度平台14沿平移装置1上表面两根导轨12和13运动用于对第一对接件2进行轴向进给并可使第一对接件2在小范围内调姿。
59.在一些实施例中,多自由度平台14可以是六自由度平台,即可以提供x、y、z方向的偏移量和绕x、y、z方向的偏转量。在另一些实施例中,多自由度平台14可以是三自由度平台,即可以提供x、y、z方向的偏移量。
60.在本技术提供的一些实施例中,如图3所示,第一对接件2的前端部位具有相对设置的一侧面与另一侧面26,其中相对设置的两个侧面上分别有对接孔(其中侧面26上具有对接孔22)。第一对接件2的前端部位上表面27上有孔23。第一对接件2的前端面24可以与多自由度平台14的竖直平台面142相连接。当多自由度平台14的竖直平台面142发生各个方向的运动时可以调节第一对接件2的姿态以便确保第一对接件2能够与第二对接件5对接。
61.如图4所示,基座平台3包括一长方体平台31和底座,长方体平台31放置在底座上。结合图1和图4,检测框架4和第二对接件5置于基座平台3上,检测框架4可以围绕第二对接件5设置。距离检测组件6、光检测组件7和孔对接检测组件8置于检测框架4上。
62.如图5和图6所示,检测框架4可以包括长方形框架41、磁力座42、磁力座43、磁力座44、磁力座45、磁力座46。长方形框架41和磁力座42、磁力座43、磁力座44、磁力座45、磁力座46等结构互相连接在一起,且在长方体平台31上的位置固定不变。在一些实施例中,磁力座42、磁力座43、磁力座44、磁力座45、磁力座46为一长方体状物体,旋转开关后产生磁力。
63.如图6所示,磁力座43与磁力座44可以放置在长方形框架41的前端,用于放置距离检测组件6和光检测组件7;磁力座42与磁力座45放置在长方形框架41的两侧靠前端位置,用于放置孔对接检测组件8;磁力座46放置在长方形框架41的后端,用于放置光检测组件7。
64.如图7所示,第二对接件5为一空腔式的物体,前端部位两侧面分别有对接孔51和有对接孔52,前端部位上表面有一有对接孔53。结合图4,第二对接件5放置在长方体平台31上的中间部位且位置固定不变,以便确保第一对接件2能够与第二对接件5成功对接。
65.如图8所示,距离检测组件6包括距离检测装置611和距离检测装置612。距离检测装置可以为激光位移传感器。
66.距离检测装置611位于第一对接件2的移动轨迹以外,且位于第二对接件5的靠近第一对接件2的一侧。距离检测装置611用于检测距离检测装置611与第一对接件2在x方向上的距离值1,距离值1用于指示多自由度平台在x方向的偏移调节量。x方向可以是平行于基座平台3的方向。
67.在一种可能的场景下,当距离检测装置611检测到的距离值1过小时,可以通过多自由度平台14在x方向调节第一对接件2的偏移量,使第一对接件2相对远离距离检测装置611。
68.距离检测装置612位于第一对接件2的移动轨迹以外,且位于第二对接件5的靠近
第一对接件2的一侧。距离检测装置612用于检测距离检测装置612与第一对接件2在z方向上的距离值2,距离值2用于指示多自由度平台在z方向的偏移调节量。z方向可以是垂直于基座平台3的方向。
69.在一种可能的场景下,当距离检测装置612检测到的距离值2过小时,可以通过多自由度平台14在z方向调节第一对接件2的偏移量,使第一对接件2相对远离距离检测装置612。
70.在图8、图10所示的实施例中,距离检测装置611和距离检测装置612可以设置在前端支架61上。前端支架61可以通过磁力座43放置在长方体平台31。前端支架61可以为两个长条物体呈90
°
联接构成,每一端可放置一个距离检测装置。
71.在一些实施例中,第一对接件2除了可能发生偏移,还可能发生偏转。通过加设更多数量的距离检测装置,可以获取多自由度平台14对第一对接件2的偏转调节量。
72.如图8所示,距离检测组件6还包括距离检测装置621、距离检测装置622、距离检测装置631。
73.距离检测装置621位于第一对接件2的移动轨迹以外,且与距离检测装置611相对于y、z方向构成的平面对称设置。距离检测装置621用于检测距离检测装置621与第一对接件2在x方向上的距离值3,距离值1和距离值3可以用于指示多自由度平台在x方向的偏移调节量和/z方向的偏转调节量。
74.在一种可能的场景下,当距离检测装置611检测到的距离值1小于距离检测装置621检测到的距离值3时,可能的原因可以包括:第一对接件2相对靠近距离检测装置611,且相对远离距离检测装置621;和/或,第一对接件2绕z轴发生了偏转。从而可以通过多自由度平台14调节第一对接件2的偏移量和/或偏转量,使第一对接件2与第二对接件5对接。在一些实施例中,可以结合第一对接件2和第二对接件5的装配间隙,确定多自由度平台在x方向的偏移调节量和/或z方向的偏转调节量。
75.距离检测装置622位于第一对接件2的移动轨迹以外,且与距离检测装置612相对于y、z方向构成的平面对称设置。距离检测装置622用于检测距离检测装置622与第一对接件2在z方向上的距离值3,距离值1和距离值3可以用于指示多自由度平台在z方向的偏移调节量和/y方向的偏转调节量。
76.在一种可能的场景下,当距离检测装置612检测到的距离值1等于距离检测装置622检测到的距离值3,且距离值1和距离值3均相对较小时,可能的原因是第一对接件2相对靠近距离检测装置612、距离检测装置622。可以通过多自由度平台14在z方向调节第一对接件2的偏移量,使第一对接件2相对远离距离检测装置612、距离检测装置622。
77.在另一种可能的场景下,当距离检测装置612检测到的距离值1小于距离检测装置622检测到的距离值3时,第一对接件2绕y轴发生了偏转。从而可以通过多自由度平台14在y方向调节第一对接件2的偏转量,使第一对接件2与第二对接件5对接。
78.在图8、图10所示的实施例中,距离检测装置621和距离检测装置622可以设置在前端支架62上。前端支架62可以通过磁力座44放置在长方体平台31。前端支架62可以为两个长条物体呈90
°
联接构成,每一端可放置一个距离检测装置。
79.距离检测装置631位于第一对接件2的移动轨迹以外,位于第二对接件5的靠近第一对接件2的一侧,且位于y、z方向构成的平面上。距离检测装置631用于检测距离检测装置
631与第一对接件2在z方向上的距离值5,距离值5用于指示多自由度平台在z方向的偏移调节量。
80.在图8、图11所示的实施例中,距离检测装置631可以设置顶部支架63上,顶部支架63设置在孔对接检测组件8的横向支架81上。横向支架81利用磁力座42、磁力座45放置在长方体平台31上。横向支架81可以包括两条竖向长条物体和一条横向长条物体。横向长条物体可以位于第二对接件5的顶部。顶部支架63可以设置在横向长条物体上。顶部支架63可以为两个长条物体呈90
°
联接构成,顶部支架63的远离横向支架81的一端可放置距离检测装置631。
81.在一种可能的场景下,当距离检测装置612检测到的距离值1相对较小、距离检测装置631检测到的距离值5相对较大时,可能的原因是第一对接件2相对靠近距离检测装置612、且相对远离距离检测装置631。可以通过多自由度平台14在z方向调节第一对接件2的偏移量,使第一对接件2相对远离距离检测装置612、且相对靠近距离检测装置631。
82.在本技术提供的一些实施例中,距离检测装置611、距离检测装置612、距离检测装置621、距离检测装置622、距离检测装置631可以不共面设置。如图8所示,距离检测装置611、距离检测装置612、距离检测装置621、距离检测装置622可以共面设置,距离检测装置631可以位于距离检测装置611、距离检测装置612、距离检测装置621、距离检测装置622所在平面以外。
83.在一种可能的场景下,当距离检测装置621检测到的距离值3和距离检测装置622检测到的距离值4相等且相对较小,距离检测装置631检测到的距离值5相对较大,可能的原因可以包括:第一对接件2相对靠近距离检测装置621和距离检测装置622,且相对远离距离检测装置631;和/或,第一对接件2绕x轴发生了偏转。从而可以通过多自由度平台14调节第一对接件2的偏移量和/或偏转量,使第一对接件2与第二对接件5对接。在一些实施例中,可以结合第一对接件2和第二对接件5的装配间隙,确定多自由度平台在z方向的偏移调节量和/或x方向的偏转调节量。
84.由此,距离检测装置611、距离检测装置612、距离检测装置621、距离检测装置622、距离检测装置631可分别计算出第一对接件2即将进入第二对接件5时其各向外表面与第二对接件5各内壁的相对间距,并将信号传输给多自由度平台14。从而多自由度平台x、z方向调节偏移量和/或偏转量,和/或,在y方向调节偏转量,实现第一对接件2与第二对接件5成功对接。
85.在图8和图12所示的实施例中,距离检测组件6还可以包括距离检测组件646。距离检测组件646可以设置在尾部支架64。距离检测组件646可判断第一对接件2相对于第二对接件5的位置,当第一对接件2即将进入第二对接件5时、即将到达目标位置时可把信号传输给多自由度平台14。尾部支架64可以利用磁力座46放置在长方体平台31上,为两个长条物体呈90
°
垂直贯穿联接构成。
86.光检测组件7可以包括光发射器641和光接收器613。光发射器641和光接收器613可以构成光电传感器。
87.光发射器641发射的光用于穿过第一对接件2和第二对接件5的装配间隙射入光接收器613,光发射器641和光接收器613的连线方向平行于y方向,光发射器641和光接收器613的连线方向位于第二对接件5的右侧,光接收器613用于输出光感应结果1,光感应结果1
用于指示光接收器613是否成功接收光发射器641发出的光。
88.当光感应结果1指示光接收器613接收光发射器641发出的光成功时,意味着光发射器641发射的光可以穿过第一对接件2和第二对接件5的装配间隙射入光接收器613,因此第一对接件2和第二对接件5在右侧具有间隙,具有可用对接空间。
89.当光感应结果1指示光接收器613接收光发射器641发出的光失败时,意味着第一对接件2和第二对接件5的右侧间隙受到了阻挡。在此情况下,多自由度平台14可以朝着背离右侧的方向调节第一对接件2,以恢复第一对接件2和第二对接件5的右侧间隙。
90.光检测组件7还可以包括光发射器644和光接收器624。光发射器644和光发射器641相对于y、z方向构成的平面对称设置。光接收器624和光接收器613相对于y、z方向构成的平面对称设置。光发射器644发射的光用于穿过第一对接件2和第二对接件5的装配间隙射入光接收器624,光发射器644和光接收器624的连线方向平行于y方向,光发射器644和光接收器624的连线方向位于第二对接件5的左侧,光接收器624用于输出光感应结果2,光感应结果2用于指示光接收器624是否成功接收光发射器644发出的光。
91.在一种可能的情况下,光感应结果1和光感应结果2中的一个指示失败,则意味着仅一侧间隙受到阻挡,第一对接件2在x方向上发生偏移的可能性相对较大。
92.在另一种可能的情况下,光感应结果1和光感应结果2均指示失败,则意味着两侧间隙均受到阻挡,第一对接件2在z方向上发生偏转的可能性相对较大。
93.光检测组件7还可以包括光发射器642、光接收器614、光发射器643、光接收器623。
94.光发射器642发射的光用于穿过第一对接件2和第二对接件5的装配间隙射入光接收器614。光发射器642和光接收器614的连线方向平行于y方向,光接收器614用于输出光感应结果3,光感应结果2用于指示光接收器614是否成功接收光发射器642发出的光。
95.光发射器643发射的光用于穿过第一对接件2和第二对接件5的装配间隙射入光接收器623。光发射器643和光接收器623的连线方向平行于y方向,光接收器623用于输出光感应结果4,光感应结果4用于指示光接收器623是否成功接收光发射器643发出的光。
96.光发射器642和光发射器643相对于y、z方向构成的平面对称设置。光接收器614和光接收器623相对于y、z方向构成的平面对称设置。光发射器642和光接收器614的连线方向,以及光发射器643和光接收器623的连线方向均位于第二对接件5的下侧。
97.在一种可能的情况下,光感应结果3和光感应结果4中的一个指示失败,则意味着仅一侧间隙受到阻挡,第一对接件2在y方向上发生偏转的可能性相对较大。
98.在另一种可能的情况下,光感应结果3和光感应结果4均指示失败,则意味着两侧间隙均受到阻挡,第一对接件2在z方向上发生偏移的可能性相对较大。
99.光检测组件7还可以包括光发射器645、光接收器632。光发射器645发射的光用于穿过第一对接件2和第二对接件5的装配间隙射入光接收器632。光发射器645和光接收器632可以设置于y、z方向构成的平面上。光发射器645和光接收器632的连线方向平行于y方向,光发射器645和光接收器632的连线方向可以位于第二对接件5的顶侧。光接收器632用于输出光感应结果5,光感应结果5用于指示光接收器632是否成功接收光发射器645发出的光。
100.在一种可能的情况下,光感应结果3(或4)和光感应结果5中的一个指示失败,则意味着仅一侧间隙受到阻挡,第一对接件2在z方向上发生偏移的可能性相对较大。
101.在另一种可能的情况下,光感应结果3(或4)和光感应结果5均指示失败,则意味着两侧间隙均受到阻挡,第一对接件2在x方向上发生偏转的可能性相对较大。
102.在图8和图10所示的实施例中,前端支架61的两端靠近联接处可以分别设置光接收器613、光接收器614;前端支架62的两端靠近联接处可以分别设置光接收器623、光接收器624。在图8和图11所示的实施例中,光接收器632可以设置在顶部支架63的远离横向支架81的一端。光接收器632可以靠近距离检测装置631设置。
103.在图8和图12所示的实施例中,尾部支架64可以由两个长条物体呈90
°
垂直贯穿联接构成,横向长条物体一端放置光发射器641、光发射器642,另一端放置光发射器643、光发射器644,竖向长条物体中间部位放置一个距离检测装置646,顶部放置光发射器645。
104.结合图3和图7,当第一对接件2和第二对接件5即将对接成功时,第一对接件2上的一对接孔可以靠近并即将与第二对接件5上的对接孔51对齐,第一对接件2上的对接孔22可以靠近并即将与第二对接件5上的对接孔52对齐,第一对接件2上的对接孔23可以靠近并即将与第二对接件5上的对接孔53对齐。在本技术提供的实施例中,可以通过设置孔对接检测装置,判断第一对接件2上的对接孔是否与第二对接件5上的对接孔对应对齐。
105.结合图8和图9,孔对接检测组件8可以包括设置在横向支架81上的孔对接检测装置82、孔对接检测装置83、孔对接检测装置84。横向支架81可以包括两条竖向长条物体和一条横向长条物体。横向长条物体可以位于第二对接件5的顶部。孔对接检测装置82和孔对接检测装置83可以分别设置在两条竖向长条物体上,孔对接检测装置84可以设置在横向竖向长条物体上。在一些实施例中,孔对接检测装置可以是相机。
106.孔对接检测装置82可以面向第二对接件5前端部位一侧面上的对接孔51设置,并用于检测对接孔51。当第一对接件2到达目标位置时,通过孔对接检测装置82,可以判断第一对接件2的与对接孔51对应的对接孔(图中未标出,以下简称为对接孔21)是否与对接孔51对中。
107.孔对接检测装置83可以面向第二对接件5前端部位另一侧面上的对接孔52设置,并用于检测对接孔52。当第一对接件2到达目标位置时,通过孔对接检测装置83,可以判断第一对接件2的对接孔22是否与对接孔52对中。
108.孔对接检测装置84可以面向第二对接件5前端部位上表面上的对接孔53设置,并用于检测对接孔53。当第一对接件2到达目标位置时,通过孔对接检测装置84,可以判断第一对接件2的对接孔23是否与对接孔53对中。
109.在一些实施例中,通过对接孔21与对接孔51的对齐情况、对接孔22与对接孔52的对齐情况、对接孔23与对接孔53的对齐情况,可以判断第一对接件2与第二对接件5的相对位置关系。
110.在一种可能的情况下,对接孔21对应对接孔51的偏上部分区域,对接孔22对应对接孔52的偏上部分区域,则第一对接件2可能的原因包括:第一对接件2相对靠近第二对接件5的顶部,即沿z轴发生了偏移,和/或,第一对接件2绕x轴发生了偏转。在一种可能的情况下,通过判断捕捉到的对接孔23的形状,可以判断第一对接件2是否绕x轴发生了偏转。
111.在一种可能的情况下,对接孔21对应对接孔51的偏上部分区域,对接孔22对应对接孔52的偏下部分区域,则第一对接件2可能的原因包括:第一对接件2绕y轴发生了偏转。
112.在一种可能的情况下,对接孔23对应对接孔53的偏左部分区域,则第一对接件2可
能的原因包括:第一对接件2相对靠近第二对接件5的左侧,即沿x轴发生了偏移,和/或,第一对接件2绕z轴发生了偏转。在一种可能的情况下,通过判断捕捉到的对接孔21(或对接孔22)的形状,可以判断第一对接件2是否绕z轴发生了偏转。
113.在一种可能的情况下,对接孔21对应对接孔51的偏前部分区域、对接孔22对应对接孔52的偏前部分区域、对接孔23对应对接孔53的偏前部分区域,则第一对接件2还可以继续进给,直到对接孔21与对接孔51、对接孔22与对接孔52、对接孔23与对接孔53均对齐。
114.下面结合图1至图12,阐述本技术实施例提供的对接系统的一种可能的对接原理。
115.平移装置1可以搭载有多自由度平台14和第一对接件2,平移装置1可运动至基座平台3旁,使第一对接件2可以大约正对第二对接件5。多自由度平台14沿平移装置1上表面11上的两根导轨12、13运动,以此对第一对接件2进行轴向进给。设置在尾部支架64上的距离检测装置646判断第一对接件2即将进入第二对接件5时会把信号传输给多自由度平台14,多自由度平台14停止进给运动并开始小范围调姿。
116.多自由度平台14停止进给运动后,距离检测组件6开始工作,设置在前端支架61、前端支架62和顶部支架63上的距离检测装置611、距离检测装置612、距离检测装置621、距离检测装置622、距离检测装置631可分别计算出第一对接件2即将进入第二对接件5时其各向外表面与第二对接件5各内壁的相对间距,并将信号传输给多自由度平台14。多自由度平台14判断第一对接件2相对于第二对接件5是否需要发生各个方向的偏移和/或偏转,确保第一对接件2能够进入第二对接件5中。当第一对接件2不再需要发生各个方向的偏移和/或偏转、能够进入第二对接件5中后,多自由度平台14继续进给运动,此时第一对接件2开始在第二对接件5内发生运动。
117.第一对接件2开始在第二对接件5内发生运动时,光检测组件7开始工作,第一对接件2在第二对接件5内部运动时发生上下倾斜或左右倾斜,则第二对接件底部、左右两侧面、顶部位置的部分光发射器发射的光会被阻隔,光接收器接收不到光信号。此时通过多自由度平台14调节第一对接件2姿态,直至所有光发射器发射的光均不被阻隔,第一对接件2继续在第二对接件5内部运动。
118.当距离检测装置646检测到第一对接件2即将达到装配位置时,孔对接检测组件8的孔对接检测装置82、孔对接检测装置83、孔对接检测装置84开启工作,此时亦需进行防碰撞检测。根据孔对接检测装置82、孔对接检测装置83、孔对接检测装置84识别出的第一对接件2的对接孔21、对接孔22、对接孔23和第二对接件5的对接孔51、对接孔52、对接孔53的相对位置,可精确计算出第一对接件2与第二对接件5之间的空间相对姿态,然后控制多自由度平台14动作,直至这些偏距减小到可满足装配要求,例如第一对接件2的三个对接孔与第二对接件5的三个对接孔分别达到同轴状态,由此达到了最终精准对接的装配目的。
119.本技术虽然以较佳实施例公开如上,但其并不是用来限定本技术,任何本领域技术人员在不脱离本技术的精神和范围内,都可以做出可能的变动和修改,因此,本技术的保护范围应当以本技术权利要求所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1