一种用于软式加油管的位姿主动控制锥套及工作方法与流程
1.本发明属于空中加油技术领域,尤其涉及一种用于软式加油管的位姿主动控制锥套及工作方法。
背景技术:
2.空中加油指加油管从加油机吊舱中向下后方脱出,加油管末端设有扩口锥套,受油机保持与锥套相对位置一致,并将受油机加油管插入锥套,实现空中燃油补给的过程。在空中加油过程中,受油机需要追踪加油管末端锥套的位置,而锥套会因加油机尾迹、下洗气流、大气湍流以及受油机机艏弓形波等扰动而发生改变,增加受油机捕获锥套的难度。但空中加油技术可以显著提受油机的续航能力,具有极其重要的支援作用,故而得到重视和大力研究。现有技术中对于软式空中加油各有不足。
3.公告号为cn 205186538 u的实用新型专利中,公开了一种通过天蓬控制机构前缘支杆与后缘支杆角度的调节,实现对锥套天蓬张启、受力的控制,进而抑制软管-锥套在大气湍流、加油机尾涡、受油机头波干扰下的飘摆运动幅度。该实用新型所采用的控制装置,将使锥套末端的软式天蓬产生高度复杂的外形改变,进而导致非定常气动力,控制难度较大。
4.公告号为cn 205891268 u的实用新型专利中,公开了一种锥套姿态控制装置,该装置分为稳流罩和控制部,稳流罩通过气流驱动高速旋转,基于角动量守恒而提供空间稳定能力,控制部分通过步进电机驱动扰流板偏转,改变气动力而使锥套在空间发生位移。该实用新型专利所采用的稳定装置,将对软式加油管产生轴向扭转力矩。
5.公告号为cn 205891269 u的实用新型专利中,公开了一种锥套姿态控制装置,该装置也分为稳流罩和控制部,该专利中,稳定罩的旋转是通过喷射高压气体实现的,控制部也是通过高压气体喷射实现锥套在空间发生位移。
6.公告号为cn 110304262 a的发明专利中,公开了一种自主机动锥套及控制方法,在传统的锥套基础上,设计了一种伞面收缩机构,通过电机、绳索以及滑轮等,带动伞面的收缩与释放,进而改变锥套外形以及气动力,实现锥套位置的控制。该发明专利的控制方法设计8套电机、绳索以及滑轮装置,系统较为复杂。
7.公告号为cn 111216907 a发明专利中,公开了一种用于软式加油管的自主机动锥套,通过对锥套的改造,利用高速下的空气动力学原理,改变锥套伞面形态,从而改变锥套的受力情况,该发明中,为了对锥套进行控制,运动的肋板会侵占一部分锥套内部空间,对受油机加油管插入锥套存在潜在的影响。
技术实现要素:
8.本发明的目的是提供一种用于软式加油管的位姿主动控制锥套及工作方法,以解决软式空中加油受油机捕获锥套难度大的问题。本发明所采用的技术方案如下:一种用于软式加油管的位姿主动控制锥套,包括:
锥套本体,所述锥套本体的一端与软式加油管连接,所述锥套本体的另一端在空中加油时与受油管连接;控制装置,若干所述控制装置圆周均布安装在所述锥套本体的外锥面上,控制装置的转动输出端沿锥套本体的周向设置,控制装置内置pid控制器;格栅翼,若干所述格栅翼与若干所述控制装置的转动输出端一一对应连接;格栅翼的舵面偏转角度通过下式确定:式中:t为pid控制算法中的时间项;u(t)为格栅翼的舵面偏转角度;e(t)为锥套当前位置与设定值的偏差;k
p
为pid控制器的比例系数;ki为pid控制器的积分系数;kd为pid控制器的差分系数。
9.进一步的,锥套本体的外锥面上圆周均布设置有若干安装座,若干控制装置一一对应设置在若干安装座上。
10.进一步的,控制装置为电机或压电作动器。
11.进一步的,所述格栅翼包括边框、菱形格栅和转轴,转轴的一端与边框的一侧边外侧中部相连,转轴的另一端与所述控制装置的转动输出端连接,所述边框为矩形边框,边框的内侧设有菱形格栅,菱形格栅的斜边与边框的任一边夹角为15
°
至75
°
。
12.进一步的,所述格栅翼至少为4个。
13.本发明还提供了一种用于软式加油管的位姿主动控制锥套的工作方法,依托于上述的一种用于软式加油管的位姿主动控制锥套实现,包括以下步骤:步骤1:加油机拖曳软式加油管飞行;步骤2:软式加油管后端与锥套连接;步骤3:由于加油机尾迹、大气湍流、受油机机艏弓形波等因素对锥套产生扰动,锥套位置发生改变;步骤4:控制装置基于内置pid控制器控制转动输出端转动,进而调节各个格栅翼的偏转;步骤5:偏转的格栅翼产生气动力,推动锥套向原始位置移动;步骤6:控制装置检测锥套位置还原,格栅翼停止偏转;步骤7:重复执行步骤4-步骤6,使锥套在空中加油过程中时刻保持位置稳定。
14.本发明还提供了另外一种用于软式加油管的位姿主动控制锥套的工作方法,依托于上述的一种用于软式加油管的位姿主动控制锥套实现,包括以下步骤:步骤1:加油机拖曳软式加油管飞行;步骤2:软式加油管后端与锥套连接;步骤3:为了降低受油机控制难度,选择将锥套主动运动至受油机附近位置,该位置为设定位置;
步骤4:控制装置基于内置pid控制器控制转动输出端转动,进而调节各个格栅翼的偏转;步骤5:偏转的格栅翼产生气动力,推动锥套向设定位置移动;步骤6:控制装置检测到锥套到达设定位置,格栅翼停止偏转;步骤7:由于加油机尾迹、大气湍流、受油机机艏弓形波等因素对锥套产生扰动,锥套位置发生改变;步骤8:控制装置基于内置pid控制器,调节各个格栅翼的偏转;步骤9:偏转的格栅翼产生气动力,推动锥套向设定位置移动;步骤10:控制装置检测锥套位置还原为设定位置,格栅翼停止偏转;步骤11:重复执行步骤8-步骤10,使锥套在空中加油过程中时刻保持位置稳定。
15.与现有技术相比,本发明的有益效果在于:1、采用格栅翼作为锥套位姿控制的气动操纵面,与已经公开的天蓬式、伞式等气动操纵方式相比,系统极为简化,有助于降低故障率,这点对于空中加油极为重要。
16.2、采用格栅翼作为锥套位姿控制的气动操纵面,与常规机翼式气动操纵方式相比,可用迎角范围大,操纵效率高,有利于缩小装置尺寸。
17.3、控制系统与格栅翼均外置,不挤占锥套内部空间,不影响锥套与受油机的对接。
18.4、可以主动抑制因加油机尾迹、下洗气流、大气湍流以及受油机机艏弓形波等扰动导致的位置波动,且能够主动将锥套移动至设定位置,提升空中加油效率,与现有的主动控制锥套相比,系统鲁棒性高、结构简单。
附图说明
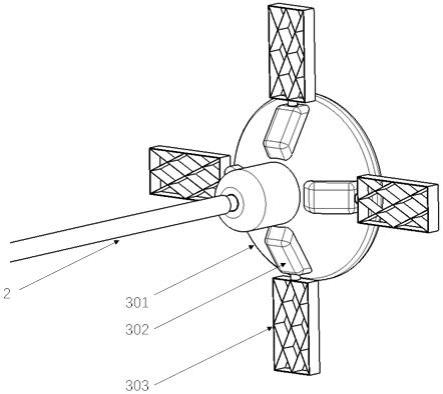
19.图1为本发明的结构示意图;图2为锥套本体的结构示意图;图3为格栅翼的结构示意图;图4为本发明调整水平位姿的示意图;图5为本发明调整竖直位姿的示意图;图6为本发明由吊舱中脱出的示意图。
20.图中:1-加油机、2-软式加油管、3-锥套、301-锥套本体、3011-安装座、302-控制装置、303-格栅翼、3031-边框、3032-菱形格栅、3033-转轴。
具体实施方式
21.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中示出的具体实施例来描述本发明。但是应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
22.本发明所提到的连接分为固定连接和可拆卸连接,所述固定连接即为不可拆卸连接包括但不限于折边连接、铆钉连接、粘结连接和焊接连接等常规固定连接方式,所述可拆卸连接包括但不限于螺栓连接、卡扣连接、销钉连接和铰链连接等常规拆卸方式,未明确限定具体连接方式时,默认可在现有连接方式中找到至少一种连接方式实现该功能,本领域
技术人员可根据需要自行选择。例如:固定连接选择焊接连接,可拆卸连接选择螺栓连接。
23.以下将结合附图,对本发明作进一步详细说明,以下实施例是对本发明的解释,而本发明并不局限于以下实施例。
24.如图1-6所示,实施例1:一种用于软式加油管的位姿主动控制锥套,包括:锥套本体301,所述锥套本体301的一端与软式加油管2连接,所述锥套本体301的另一端在空中加油时与受油管连接;加油机1与软式加油管2连接,软式加油管2末端与锥套3连接;控制装置302,控制装置302为电机或压电作动器,若干所述控制装置302圆周均布安装在所述锥套本体301的外锥面上,控制装置302的转动输出端沿锥套本体301的周向设置,控制装置302内置pid控制器和反馈检测装置;锥套本体301呈轴对称的扩口形;格栅翼303,所述格栅翼303至少为4个,若干所述格栅翼303与若干所述控制装置302的转动输出端一一对应连接;反馈检测装置对锥套3进行位置反馈检测和速度反馈检测,为格栅翼303提供偏转依据,pid控制器调节控制装置302的转动输出端转动,进而调节格栅翼303的偏转角度。格栅翼303的舵面偏转角度通过下式确定:式中:t为pid控制算法中的时间项;u(t)为格栅翼的舵面偏转角度;e(t)为锥套当前位置与设定值的偏差;k
p
为pid控制器的比例系数;ki为pid控制器的积分系数;kd为pid控制器的差分系数。
25.本发明的设计思路是,基于格栅翼303优良的气动操纵特性,通过控制装置302驱动其转动,以产生相应方向的气动力,进而推动锥套产生位移,实现扰动抑制以及主动移动至设定位置,提升空中加油安全性及效率。
26.给定一组k
p
、ki、kd数值,采集锥套3当前位置与设定值的偏差,基于格栅翼303的舵面偏转角度公式计算格栅翼303舵面所需要的偏角,就能够对锥套位置进行有效的控制,公式中的时间项t在控制系统启动时数值为零,再以控制系统的时间步长推进,时间步长为控制系统采样率的导数。
27.锥套本体301的外锥面上圆周均布设置有若干安装座3011,若干控制装置302一一对应设置在若干安装座3011上。
28.所述格栅翼303包括边框3031、菱形格栅3032和转轴3033,转轴3033的一端与边框3031的一侧边外侧中部相连,转轴3033的另一端与所述控制装置302的转动输出端连接,所述边框3031为矩形边框3031,边框3031的内侧设有菱形格栅3032,菱形格栅3032的斜边与边框3031的任一边夹角为15
°
至75
°
,边框3031和菱形格栅3032由等宽度的金属板条制作,使格栅翼303具有一定厚度,格栅翼303与气流产生倾角时,可以使气流对格栅翼303产生推动力,金属板条的宽向沿格栅翼303的厚度方向设置,菱形格栅3032的菱形孔有一组对角与边框3031的任一侧边平行或垂直。
29.实施例2:一种用于软式加油管的位姿主动控制锥套的工作方法,依托于实施例1中的一种用于软式加油管的位姿主动控制锥套实现:包括以下步骤:步骤1:加油机1拖曳软式加油管2飞行;步骤2:软式加油管后端与锥套3连接;步骤3:由于加油机尾迹、大气湍流、受油机机艏弓形波等因素对锥套3产生扰动,锥套3位置发生改变;步骤4:控制装置302基于内置pid控制器控制转动输出端转动,进而调节各个格栅翼303的偏转;步骤5:偏转的格栅翼303产生气动力,推动锥套3向原始位置移动;步骤6:控制装置302检测锥套位置还原,格栅翼停止偏转;步骤7:重复执行步骤4-步骤6,使锥套3在空中加油过程中时刻保持位置稳定。
30.实施例3:一种用于软式加油管的位姿主动控制锥套的工作方法,依托于实施例1中的一种用于软式加油管的位姿主动控制锥套实现:包括以下步骤:步骤1:加油机1拖曳软式加油管2飞行;步骤2:软式加油管后端与锥套3连接;步骤3:为了降低受油机控制难度,选择将锥套3主动运动至受油机附近位置,该位置为设定位置;步骤4:控制装置302基于内置pid控制器控制转动输出端转动,进而调节各个格栅翼303的偏转;步骤5:偏转的格栅翼303产生气动力,推动锥套3向设定位置移动;步骤6:控制装置302检测到锥套3到达设定位置,格栅翼303停止偏转;步骤7:由于加油机尾迹、大气湍流、受油机机艏弓形波等因素对锥套3产生扰动,锥套3位置发生改变;步骤8:控制装置302基于内置pid控制器,调节各个格栅翼303的偏转;步骤9:偏转的格栅翼303产生气动力,推动锥套3向设定位置移动;步骤10:控制装置302检测锥套位置还原为设定位置,格栅翼停止偏转;步骤11:重复执行步骤8-步骤10,使锥套3在空中加油过程中时刻保持位置稳定。
31.采用格栅翼作为锥套位姿控制的气动操纵面,与已经公开的天蓬式、伞式等气动操纵方式相比,系统极为简化,有助于降低故障率,这点对于空中加油极为重要。
32.采用格栅翼作为锥套位姿控制的气动操纵面,与常规机翼式气动操纵方式相比,可用迎角范围大,操纵效率高,有利于缩小装置尺寸。
33.控制系统与格栅翼均外置,不挤占锥套内部空间,不影响锥套与受油机的对接。
34.可以主动抑制因加油机尾迹、下洗气流、大气湍流以及受油机机艏弓形波等扰动导致的位置波动,且能够主动将锥套移动至设定位置,提升空中加油效率,与现有的主动控制锥套相比,系统鲁棒性高、结构简单。
35.以上实施例只是对本专利的示例性说明,并不限定它的保护范围,本领域技术人员还可以对其局部进行改变,只要没有超出本专利的精神实质,都在本专利的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1