一种无人机搭载的高空拆鸟巢装置的制作方法
1.本发明涉及供电输电线路技术领域,尤其涉及一种无人机搭载的高空拆鸟巢装置。
背景技术:
2.随着科学技术的发展,输电线路建设的不断完善,输电线路杆塔的数量和高度也随之明显增加,现在220kv及以上的输电线路杆塔高度一般在20米以上,目前,输电线路高空作业依旧通过人工爬杆进行。而鸟巢作为诱发输电线路跳闸的重要因素之一,尤其是春秋季作为鸟类迁徙高发期,鸟巢数量剧增,为保证输电线路安全运行,必须及时开展鸟巢拆除工作。目前输电线路杆塔鸟巢主要还是通过人工登杆进行拆除,而人工高空作业在攀登、移动和作业过程中,危险性极高。
3.为了解决人工爬杆危险性极高的问题,现有技术中也存在高空拆鸟巢的装置,如申请号201810247268.3,名称为“一种架空配电线路鸟巢拆除装置”的中国发明专利公开了以下内容“软细钢索一端与拉紧调整件连接,软细钢索另一端与可活动连接片连接,软细钢索穿设在操作棒内,软细钢索拉紧调整件用于调整钩形夹钳的松紧度,以达到自由调节钩形夹钳的握紧度,实现钩形夹钳能牢牢夹住鸟巢枝条”,本公开专利虽然能对鸟巢进行拆除,但是是通过调节钩形夹钳的握紧度来对鸟巢进行拆除的,在拆除的过程中,钩形夹钳夹住鸟巢枝条会对幼鸟或者成鸟造成伤害。
技术实现要素:
4.本发明提供一种无人机搭载的高空拆鸟巢装置,以解决人工爬杆拆鸟巢危险性高以及采用夹钳破坏鸟巢会造成幼鸟或者成鸟伤害的技术问题。
5.本发明是通过如下措施实现的:
6.一种无人机搭载的高空拆鸟巢装置,包括无人机,所述无人机支腿底部设置有电磁铁,所述无人机的四个支腿中间位置设置有拉杆,所述拉杆上设置有固定板,所述固定板上设置有伸缩机构,所述固定板上设置有驱动机构,所述驱动机构驱动所述伸缩机构伸缩,所述伸缩机构头部设置有电动推杆,所述电动推杆上设置有夹持机构。
7.进一步的,所述夹持机构包括箱体,所述箱体中心位置设置有偏心轮,所述偏心轮上设置有移动块,所述移动块两端对称设置有滑动块,所述滑动块中间位置设置有夹杆,所述夹杆的末端与所述移动块枢轴连接。
8.进一步的,所述箱体上端面设置有竖向凹槽,所述箱体的上端面设置有横向凹槽,所述横向凹槽与所述竖向凹槽十字交叉,所述竖向凹槽中心设置有轴孔,所述轴孔内设置有转轴,所述转轴的底部设置有电机a,所述电机a设置在所述箱体内,所述转轴的顶部设置所述偏心轮,所述偏心轮设置在所述竖向凹槽内。
9.进一步的,所述移动块中间设置有长条通孔,所述偏心轮的偏心轴设置在所述长条通孔内,所述长条通孔下端设置有柱销a,所述柱销a设置在所述移动块的上端面。
10.进一步的,所述横向凹槽内设置所述滑动块,所述滑动块上设置有柱销b,所述夹杆中间位置设置在所述柱销a上,所述夹杆的末端设置在所述柱销b上。
11.进一步的,所述伸缩机构包括固定杆,所述固定杆前侧设置有挡板,所述固定杆上设置有滑动杆,所述滑动杆设置在所述挡板之间,所述滑动杆上设置有卡板,所述固定杆设置在所述卡板之间。
12.进一步的,所述滑动杆末端设置有电动推杆,所述电动推杆的推杆座设置在所述滑动杆的下端,所述电动推杆的活塞杆贯穿所述滑动杆,所述电动推杆的活塞杆与所述箱体的底面固定连接。
13.进一步的,所述驱动机构包括齿条,所述齿条设置在所述滑动杆的底部,所述固定杆上设置有小支架,所述小支架上设置有旋转轴,所述旋转轴上设置有齿轮,所述齿轮与所述齿条啮合,所述旋转轴一端设置有电机b,所述电机b设置在所述小支架外侧。
14.本发明的有益效果:
15.1.本发明不用人工攀爬电杆就能对鸟巢进行拆除,安全性高,并且采用从鸟巢底部将鸟巢拨除的方式,能有效的防止鸟巢在拆除的过程中对鸟巢造成的损坏,有效的保护了幼鸟和成鸟。
16.2.采用无人机可以代替人工攀爬塔杆,当无人机飞到塔杆上后,给电磁铁通电,当无人机飞到塔杆上后,可以通过电磁铁吸附在塔杆上,固定板的作用用于安装伸缩机构,伸缩机构保证夹持机构靠近鸟巢。
17.3.本发明中的夹持机构是用于从鸟巢的底部夹持鸟巢,当夹持机构夹持到鸟巢后,电动推杆推动夹持机构往上用力,用于将鸟巢在塔杆上拨除。
18.4.无人机支腿用于固定无人机,电磁铁用于防止无人机在塔杆上晃动。
附图说明
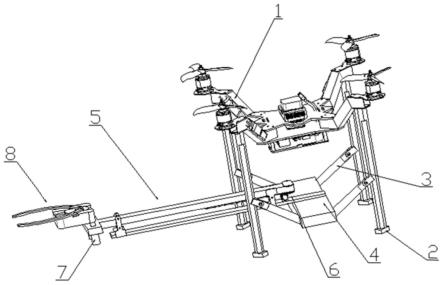
19.图1为本发明的结构示意图。
20.图2为伸缩机构在本发明上的结构示意图。
21.图3为图2的a处的局部放大图。
22.图4为夹持机构在本发明上的结构示意图。
23.图5为夹持机构的结构示意图。
24.图6为箱体的结构示意图。
25.图7为偏心轮在夹持机构上的结构示意图。
26.图8为移动块在偏心轮上的结构示意图。
27.其中,附图标记为:1.无人机;2.电磁铁;3.拉杆;4.固定板;5.伸缩机构;51.固定杆;52.挡板;53.滑动杆;54.卡板;6.驱动机构;61.齿条;62.小支架;63.旋转轴;64.齿轮;65.电机b;7.电动推杆;8.夹持机构;81.箱体;811.竖向凹槽;8111.轴孔;812.横向凹槽;82.偏心轮;83.移动块;831.长条通孔;832.柱销a;84.滑动块;841.柱销b;85.夹杆。
具体实施方式
28.为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
29.一种无人机搭载的高空拆鸟巢装置,包括无人机1,采用无人机可以代替人工攀爬
塔杆,无人机1支腿底部设置有电磁铁2,电磁铁用于防止无人机在塔杆上晃动,当无人机飞到塔杆上后,给电磁铁通电,当无人机飞到塔杆上后,可以通过电磁铁吸附在塔杆上,无人机1的四个支腿中间位置设置有拉杆3,拉杆3上设置有固定板4,固定板的作用用于安装伸缩机构,固定板4上设置有伸缩机构5,伸缩机构保证夹持机构靠近鸟巢,固定板4上设置有驱动机构6,驱动机构6驱动伸缩机构5伸缩,伸缩机构5头部设置有电动推杆7,电动推杆7上设置有夹持机构8。
30.本发明中的夹持机构是用于从鸟巢的底部夹持鸟巢,当夹持机构夹持到鸟巢后,电动推杆推动夹持机构往上用力,用于将鸟巢在塔杆上拨除。
31.夹持机构8包括箱体81,箱体81中心位置设置有偏心轮82,偏心轮82上设置有移动块83,移动块83两端对称设置有滑动块84,滑动块84中间位置设置有夹杆85,夹杆85的末端与移动块83枢轴连接。
32.箱体81上端面设置有竖向凹槽811,箱体81的上端面设置有横向凹槽812,横向凹槽812与竖向凹槽811十字交叉,竖向凹槽811中心设置有轴孔8111,轴孔8111内设置有转轴,转轴的底部设置有电机a,电机a设置在箱体81内,转轴的顶部设置偏心轮82,偏心轮82设置在竖向凹槽811内。
33.移动块83中间设置有长条通孔831,偏心轮82的偏心轴设置在长条通孔831内,长条通孔831下端设置有柱销a832,柱销a832设置在移动块83的上端面。
34.横向凹槽812内设置滑动块84,滑动块84上设置有柱销b841,夹杆85中间位置设置在柱销a832上,夹杆85的末端设置在柱销b841上。
35.本发明夹持机构的工作原理:启动电机a,电机a的输出轴旋转,带动转轴旋转,转轴旋转带动偏心轮旋转,偏心轮旋转带动偏心轴旋转,因为偏心轴是设置在移动块的长条通孔内的,所以偏心轮旋转带动移动块在竖向凹槽内前后移动,又因为夹杆末端与移动块上的柱销b枢轴连接的,因此移动块前后移动,通过柱销a驱动滑动块在横向凹槽内移动。
36.具体的,当移动块在竖向凹槽内往前移动时,通过夹块,驱动滑动块在横向凹槽内往箱体的外侧移动,当滑动块往箱体的外侧移动时,两个夹杆之间的距离增大。
37.启动电动推杆,电动推杆的活塞杆收缩,带动夹持机构下降直到夹持机构移动到鸟巢的底部,关闭电动推杆,启动电机a,电机a输出轴旋转,带动两个夹杆之间的距离增大,两个夹杆接触到鸟巢的底部,关闭电机a,再反向启动电机a,电机a的输出轴旋转带动两个夹杆之间的距离变小,进而在鸟巢的底部将鸟巢夹持住。
38.再次反向启动电动推杆,电动推杆的活塞杆伸长,进而带动两个夹杆往上移动,从而将鸟巢在塔杆上拔除,不破坏鸟巢的整体结构。
39.伸缩机构5包括固定杆51,固定杆51前侧设置有挡板52,固定杆51上设置有滑动杆53,滑动杆53设置在挡板52之间,滑动杆53上设置有卡板54,固定杆51设置在卡板54之间。
40.滑动杆53末端设置有电动推杆7,电动推杆7的推杆座设置在滑动杆53的下端,电动推杆7的活塞杆贯穿滑动杆53,电动推杆7的活塞杆与箱体81的底面固定连接。
41.驱动机构6包括齿条61,齿条61设置在滑动杆53的底部,固定杆51上设置有小支架62,小支架62上设置有旋转轴63,旋转轴63上设置有齿轮64,齿轮64与齿条61啮合,旋转轴63一端设置有电机b65,电机b65设置在小支架62外侧。
42.本发明中伸缩机构的工作原理:启动电机b,电机b输出轴旋转带动旋转轴旋转,旋
转轴旋转带动齿轮旋转,因为齿轮与齿条啮合,因此齿轮旋转带动齿条沿着直线移动,又因为齿条与滑动杆是固定连接的,因此齿条移动带动滑动杆移动,继而实现伸缩机构的伸缩。
43.本发明的使用过程,包括以下步骤:
44.步骤一:启动无人机,飞手将无人机遥控到塔杆接近鸟巢的位置;
45.步骤二:当无人机飞到指定位置后,飞手通过控制按钮给电磁铁通电,将无人机固定在塔杆上;
46.步骤三:启动电机b,电机b输出后旋转,带动旋转轴旋转,进而带动齿轮旋转,因为齿轮与齿条是啮合的,因此齿条旋转带动齿条移动,又因为齿条和滑动杆固定在一起的,因此滑动杆沿着固定杆伸长或者缩短;
47.步骤四:当滑动杆沿着固定杆伸长时,夹持机构靠近鸟巢的位置;
48.步骤五:启动电动推杆,电动推杆的活塞杆收缩,带动夹持机构靠近鸟巢底部的位置,关闭电动推杆;
49.步骤六:启动电机a,电机a的输出轴旋转,带动转轴旋转,转轴旋转带动偏心轮旋转,偏心轮旋转带动偏心轴旋转,因为偏心轴是设置在移动块的长条通孔内的,所以偏心轮旋转带动移动块在竖向凹槽内前后移动,又因为夹杆末端与移动块上的柱销b枢轴连接的,因此移动块前后移动,通过柱销a驱动滑动块在横向凹槽内移动,当移动块在竖向凹槽内往前移动时,通过夹块,驱动滑动块在横向凹槽内往箱体的外侧移动,当滑动块往箱体的外侧移动时,两个夹杆之间的距离增大,鸟巢的底部设置在两个夹杆之间,关闭电机a;
50.步骤七:再反向启动电机a,电机a的输出轴旋转带动两个夹杆之间的距离变小,进而在鸟巢的底部将鸟巢夹持住;
51.步骤八:再次反向启动电动推杆,电动推杆的活塞杆伸长,进而带动两个夹杆往上移动,从而将鸟巢在塔杆上拔除,不破坏鸟巢的整体结构。
52.本发明未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述,当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1