一种可飞行双体无人帆船
1.本发明属于无人帆船技术领域,具体地说,是一种可飞行双体无人帆船。
背景技术:
2.无人帆船是以太阳能、风能等可再生能源作为系统控制的动力来源,可以胜任生态环境观测、信息传输、违法活动探查等任务,且其可以长时间进行远海作业。目前对于无人帆船的研究主要有德蒙福特大学(de montfort university),其研究重点在于无人帆船导航和路径规划算法的研究。还有苏黎世联邦理工学院(swiss federal institute of technology zurich)的团队,其研究重点在于无人帆船的建模和仿真。还有美国saildrone公司,2012年推出了无人帆船。船上安装有翼帆和太阳能电池板,船长7m,总高7.5m(水面以上部分高5m),满载质量545kg,载荷能力100kg,搭载了最大功率10w的太阳能电池板和气象站、ctd等传感器,航速可达3~5kn,续航力6~12个月。saildrone usv作为美国北极探索创新技术(innovative technology for arctic exploration,itae)项目中关键平台之一,于2015年在白令海执行了观测任务,为分析海冰融化对海面降温的影响提供了数据。目前saildrone已经在海上累计航行了111万km。后期计划生产1000艘无人帆船,打造一个6
°×6°
分辨率覆盖全球海洋的“量化星球”。
3.而国内相关的研究比较少,主要集中在研究所和大学。上海交通大学对无人船进行了多年研究,其在无人帆船领域的研究重点主要在帆船控制理论方面。中国科学院沈阳自动化研究所的科研团队对无人帆船在海洋观测时的航行机理、设计与优化等问题展开了研究,在2018年研发出了“海鸥”号。“海鸥”号重180kg,船体长3.5m,航速3km/s,以风力作为驱动,用太阳能为船体的控制系统和传感器供电,从而实现长时间海洋观测。2019年底,“海鸥”号在青岛完成了海上实验,其航向控制、位置保持、和路径跟踪等方面表现出了良好的控制能力。2022年5月,“海鸥”号使用增强的遗传算法(ga)求解器帮助速度预测程序(vpps)快速收敛,同时基于邻域信息的优化(nibo)策略加速和优化速度预测的过程,对不同设计的无人帆船进行仿真和试验,在设计和优化上取得了新的进展。
4.无人帆船航行性能很大程度上取决于对风能的利用率,但是国内外对于无人帆船的控帆策略研究甚少,大多依据有人操帆的经验总结,难以满足无人帆船日益智能化的需要。
技术实现要素:
5.本发明的目的在于提供一种可飞行双体无人帆船,是一种具备空中飞行、水面航行两种方式的无人帆船系统,融合机器视觉,依靠太阳能和风能提供持续动力,绿色无污染,可实现长时间水面作业,并可进行自主规划路径巡航及自主避障,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。
6.为实现上述目的,本发明采用以下技术方案:
7.一种可飞行双体无人帆船,包括船体、两个u2820电机,以及分别与船体连接的两
个船帆、两个1155螺旋桨、尾舵、中央机翼及尾翼,所述船体内部有密封舱,其内部放置太阳能转换模块、传感器、航行控制器、信号接收机和信息综合处理计算机;所述信号接收机接收遥控信号并把信号发送给航行控制器,以实现对无人帆船的远程遥控,所述航行控制器向两个u2820电机旁边的单向电调发送信号,单向电调驱动u2820电机旋转,实现该无人帆船的水面航行或空中飞行;所述信息综合处理计算机根据设定的使命及接收到的传感器的信息进行自主路径规划;所述太阳能转换模块存储中央机翼上的柔性薄膜太阳能发电板转换的电力,为无人帆船的控制系统和传感器供电。
8.进一步地,所述船体为双船体结构,包括碳纤维甲板,甲板上有碳纤维盖板,以及提供浮力的聚乙烯泡沫船身;中央机翼通过碳纤维连接两个船体;两个尾舵与第二双轴舵机连接,舵机通过金属连接件与碳纤维管连接分别固定在船体的尾部,两个尾舵之间通过尾翼连接。
9.进一步地,所述两个u2820电机通过t+l型金属连接件与碳纤维甲板固定;通过h型金属连接件对称分布于船体前部两侧的圆形预留孔洞中。
10.进一步地,所述h型金属连接件高8cm,在通过整体重量和浮力的计算下,尽可能使螺旋桨与船体在同一轴线上,防止螺旋桨打水影响推进效率或损坏推进器。
11.进一步地,所述船帆由单轴舵机与双轴舵机提供两个自由度,对称分布于船体两侧的圆形预留孔洞中,并由金属结构件与碳纤维甲板相连。
12.进一步地,在航行模式下,双轴舵机折叠至垂直状态,单轴舵机使船帆旋转一定的角度,从而推动无人帆船前进;在飞行模式下,双轴舵机使船帆旋转至水平状态,利用伯努利原理为无人帆船起飞提供升力。
13.进一步地,所述尾舵通过第二双轴舵机与尾翼连接,其在遥控器控制下,配合船帆的驱动,使得无人帆船能够前行、转向。
14.进一步地,所述传感器包括双目摄像头、gps接收机,双目摄像头镶嵌于船体头部,用于进行环境信息采集及目标检测与跟踪。
15.进一步地,所述gps接收机位于船体前部,用于确定无人帆船的位置、航向和航速。
16.进一步地,还包括一6s航模电池,其置于所述船体密封仓内,用于无人帆船飞行模式下供电。
17.有益效果
18.本发明是一种可飞行双体无人帆船,是一种具备飞行、航行两种方式的无人帆船系统,融合机器视觉,可实现长时间远距离作业,自主规划路径巡航,及时躲避障碍物,依靠太阳能和风能提供动力,绿色无污染,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。
附图说明
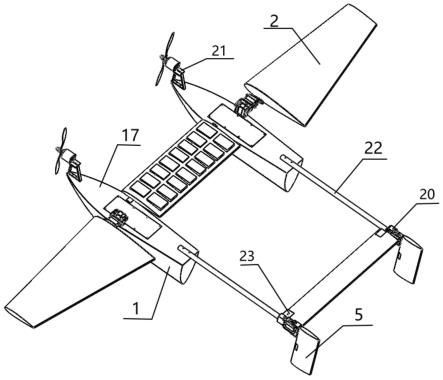
19.图1为本发明空中飞行状态的轴测图;
20.图2为本发明空中飞行状态的俯视图;
21.图3为本发明空中飞行状态的前视图;
22.图4为本发明内部结构示意图。
23.图中:1为船体,2为船帆,3为推进电机,4为螺旋桨,5为尾舵,6为柔性薄膜太阳能
发电板,7为中央机翼,8为尾翼,9为航行控制器,10为信号接收机,11为6s航模电池,12为gps接收机,13为信息综合处理计算机,14为太阳能转换模块,15为单向电调,16为碳纤维盖板,17为碳纤维甲板,18为单轴舵机,19为双轴舵机,20为第二双轴舵机,21为t+l型金属连接件,22为碳纤维连接杆,23为h型金属连接件,24为双目摄像头。
具体实施方式
24.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
25.如图1-4所示,本发明提供的一种可飞行双体无人帆船,包括:船体1,船帆2,推进电机3,螺旋桨4,尾舵5,柔性薄膜太阳能发电板6,中央机翼7,尾翼8,航行控制器9,信号接收机10,6s航模电池11,gps接收机12,信息综合处理计算机13,太阳能转换模块14,单向电调15,碳纤维盖板16,碳纤维甲板17,轴舵机18,双轴舵机19,第二双轴舵机20,t+l型金属连接件21,碳纤维连接杆22,h型金属连接件23,双目摄像头24。
26.本发明的实施例中,船体1内部放置的太阳能转换模块14存储中央机翼7上的柔性薄膜太阳能发电板6转换的电力,为无人帆船的控制系统和传感器供电。
27.本发明的实施例中,航行控制器9向位于各推进电机3旁边的单向电调15发送信号,单向电调15驱动推进电机3旋转,实现该无人帆船在紧急情况下飞行,避开障碍物。
28.本发明的实施例中,船体1为双船体结构,包括碳纤维甲板17,甲板上有碳纤维盖板16,可开舱放置控制系统相关部件,提供浮力的聚乙烯泡沫船身。
29.本发明的实施例中,中央机翼7通过碳纤维连接两个船体,两个尾舵5与第二双轴舵机20连接,第二双轴舵机20通过金属连接件24与碳纤维连接杆22连接分别固定在船体的尾部,两个尾舵5之间通过尾翼8连接。
30.本发明的实施例中,船帆2为两个,其由单轴舵机18与双轴舵机19提供两个自由度,对称分布于船体两侧的圆形预留孔洞中,并由h型金属结构件23与碳纤维甲板17相连。
31.本发明的实施例中,在航行模式下,双轴舵机19折叠至垂直状态,单轴舵机18使船帆2旋转一定的角度,从而推动无人帆船前进。
32.本发明的实施例中,在飞行模式下,双轴舵机19折叠至水平状态,利用伯努利原理为无人帆船起飞提供一定升力。
33.本发明的实施例中,尾舵5通过第二双轴舵机20与碳纤维连接杆22连接,其在遥控器控制下,配合船帆2的驱动,使得无人帆船能够前行、转向。
34.本发明的实施例中,飞行推进电机3为两个,配套使用40a单向电调15与碳纤维螺旋桨4构成,通过h型金属连接件23对称分布于船体前部两侧的圆形预留孔洞中,并由h型金属结构件23与机身的框架结构相连。
35.本发明的实施例中,h型金属连接件23高8cm,在通过整体重量和浮力的计算下,尽可能使螺旋桨4与船体1在同一轴线上,防止螺旋桨4打水的同时油门升力达到最大。
36.本发明的实施例中,双目摄像头24放镶嵌于船体头部,用于进行环境信息采集及目标检测与跟踪。
37.本发明的实施例中,gps接收机12位于船体前部,用于确定无人帆船的位置和速度。
38.本发明的实施例中,所述6s航模电池11位于船体内部,用于帆船飞行模式下供电。
39.本发明的实施例中,太阳能转换模块14包括太阳能转换电能装置,其通过转换技术将柔性薄膜太阳能发电板6获取的能量转换为电能,为无人帆船的控制系统和传感器供电。
40.本发明的实施例中,航行控制器9放置于船体前部的密封舱内,用于控制无人帆船的飞行。
41.本发明的实施例中,信号接收机10放置于船体前部的密封舱内,其接收遥控信号并把信号发送给航行控制器9,以实现对无人帆船的远程遥控。
42.本发明的实施例中,信息综合处理计算机13放置于船体前部的方形密封舱内,其根据设定的使命及双目摄像头24、gps接收机12等传感器的信息进行自主路径规划。
43.综上所述,本发明的一种可飞行双体无人帆船,可在水面航行模式和空中飞行模式间自主切换。在水面航行模式下,帆船由风力提供动力,此时船帆垂直于水平面,由航行控制器控制风帆迎风角度,实现水面风力驱动航行、转弯,如有必要,使用6s航模电池供电,由帆船前部的螺旋桨推进器提供续航动力,实现其在水面的快速航行,通过自主路径规划至指定位置。在飞行模式下,船帆由竖直状态转换为水平状态,通过6s航模电池供电,通过航行控制器控制推进电机的转速以及机翼和尾舵的角度,实现水面起飞和空中飞行。位于无人帆船前端的摄像头在航行过程中对周围海洋环境进行观测,并自主进行目标跟踪及障碍物识别。
44.本发明提供的一种可飞行双体无人帆船,是一种具备飞行、航行两种方式的无人帆船系统,融合机器视觉,可实现长时间远距离作业,自主路径规划,及时躲避障碍物并可以实现快速转场,依靠太阳能和风能提供持续动力,绿色无污染,在水体数据采集、水面巡逻、海洋勘探等方面应用前景广阔。
45.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1