一种柔性附顶式无人机
1.本发明属于无人机技术领域,具体涉及一种柔性附顶式无人机。
背景技术:
2.小型无人机广泛用于城市及室内作战,相比于地面行驶,空中飞行的无人机具备更好的灵活性,更适应复杂的战场环境。但受储能电池重量的限制,无人机飞行续航时间只能保持在半小时之内,限制了其在作战任务中的连续使用服务,高载荷的储能电池,也极大提升了无人机的成本。
技术实现要素:
3.有鉴于此,本发明提供了一种柔性附顶式无人机,结构简单、成本低廉,耗电少,续航时间长,隐蔽性较高,可广泛用于室内巡逻监控、未知地形的长时间侦查勘测、侦查打一体等领域。
4.本发明是通过下述技术方案实现的:
5.一种柔性附顶式无人机,包括:机架、两个以上柔性体、两个以上螺旋桨、动力电池、飞行控制模块和相机;
6.所述机架为平板结构;
7.每个所述柔性体为柱状壳体,且内部均填充有气体,两个以上柔性体沿圆周均匀分布安装在机架上,两个以上柔性体的总浮力大于所述无人机的重力;
8.两个以上螺旋桨沿圆周均匀分布安装在机架上;
9.动力电池、飞行控制模块和相机均安装在机架上;
10.动力电池、飞行控制模块、相机和柔性体均不干涉螺旋桨的旋转;
11.所述动力电池为所述飞行控制模块和螺旋桨供电;所述飞行控制模块控制螺旋桨的旋转;所述相机用于侦察记录图像。
12.进一步的,所述柔性体的端面与机架的边缘铰接,柔性体可发生相对于机架的转动,当柔性体收拢至其端面与机架平行时,柔性体位于极限位置ⅰ;当柔性体展开至其端面与机架垂直时,柔性体位于极限位置ⅱ;柔性体的展开收拢不受螺旋桨的旋转与机架上安装的动力电池、飞行控制模块和相机的干涉;
13.所述飞行控制模块控制柔性体在极限位置ⅰ和极限位置ⅱ之间的角度范围内、相对机架的转动与固定。
14.进一步的,,所述无人机还包括与柔性体等数量的变形控制机构,所述变形控制机构一一对应安装在柔性体与机架的铰接处,飞行控制模块通过控制变形控制机构,来控制柔性体在极限位置ⅰ和极限位置ⅱ角度范围内相对机架的转动与固定。
15.进一步的,所述柔性体和螺旋桨的个数均为三个,三个螺旋桨与三个柔性体沿圆周间隔设置,且均匀分布。
16.进一步的,所述机架为平面的六边形框架结构,六边形框架结构包括三个等长度
的长边和三个等长度的短边,三个长边与三个短边间隔设置;每个柔性体的一个端面均与所述机架的相应短边铰接,三个所述螺旋桨一一对应安装在机架的长边的中点处。
17.进一步的,机架上加工有三个梯形的孔。
18.进一步的,所述柔性体的横截面为三角形,三角形的三个顶点为圆角过渡,三个柔性体均安装在机架的一侧,三个柔性体均在极限位置ⅰ时,三个柔性体的端面围成一个等边三角形的轮廓,所述轮廓的中心沿柔性体的长度方向延伸形成一个空间,用于容置相机,相机安装在机架下方。
19.进一步的,所述柔性体采用ptfe塑料,内部填充有氦气。
20.进一步的,飞行控制模块还用于控制相机的开关。
21.进一步的,所述一种柔性附顶式无人机还包括定位装置,所述定位装置安装在机架上,内嵌有gps系统,且不干涉螺旋桨的旋转和柔性体的展开收拢。
22.有益效果:
23.(1)本发明中,柔性体内部填充有气体,使得柔性体的总浮力大于无人机系统的重力,使得无人机系统在无动力时附顶停靠,动力电池无需负责无人机系统的重力消耗,只需输出较小的功率就可以进行机动,极大减少无人机飞行的耗电,使续航时间成倍增加,同时低功率驱动可无人机系统实现静音飞行,大大提高隐蔽性。
24.(2)本发明中,柔性体的端面与机架的边缘铰接,当柔性体收拢至其端面与机架平行时,柔性体位于极限位置ⅰ;当柔性体展开至其端面与机架垂直时,柔性体位于极限位置ⅱ;飞行控制模块控制柔性体在极限位置ⅰ和极限位置ⅱ之间的角度范围内、相对机架的转动与固定。通过设置可绕机架转动的柔性体,在面对室内可飞行区域少、穿越通道狭窄等情况时,可主动调节自身构型,减少触障面积,提高无人机系统灵活性。在可飞行区域广阔时,主动调节自身构型,增加附顶面积,提高无人机系统稳定性及隐蔽性。本发明结构简单、成本低廉,任务适配性强,适合用于大规模集群作战,可广泛用于室内巡逻监控、未知地形的长时间侦查勘测、侦查打一体等领域。
25.(3)本发明的三个螺旋桨与三个柔性体沿圆周间隔设置,且均匀分布,使得无人机在飞行过程中保持平衡,无需螺旋桨输出力矩来维持无人机的平衡。
26.(4)本发明的机架上加工有三个梯形的孔,不仅可以减重,还可以减少无人机升降时的空气阻力,进一步减少无人机飞行的耗电。
27.(5)本发明的柔性体为柱状壳体,柱状壳体的端面为三角形,三角形的三个顶点为圆角过渡,三个柔性体均安装在机架的一侧,三个柔性体均在极限位置ⅰ时,三个柔性体的端面围成一个等边三角形的轮廓,轮廓的中心沿柔性体的长度方向延伸形成一个空间,用于容置相机,采用柱状壳体,不仅可以为无人机提供大于重力的浮力,同时为相机的安装预留空间,保证了相机能够安装在机架下方,实现无人机对其下方环境的侦测。
28.(6)本发明的柔性体采用ptfe塑料,具有耐热、耐寒性优良的特点,可在-180~260℃长期使用,且具有抗酸抗碱、抗各种有机溶剂的特点,具有可靠性,可满足大部分工况的要求。
29.(7)本发明的无人机还包括定位模块,定位模块也安装在机架上,且内嵌有gps系统,可在侦察勘测过程中对无人机进行定位,确定勘测目标位置,实现侦查打一体化。
附图说明
30.图1是机架的示意图;
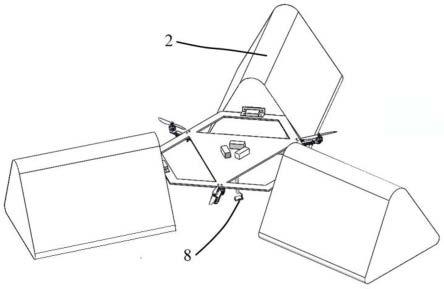
31.图2是本发明的构型示意图ⅰ;
32.图3是本发明的构型示意图ⅱ;
33.其中,1-机架,2-柔性体,3-螺旋桨,4-变形控制机构,5-动力电池,6-定位装置,7-飞行控制模块,8-相机。
具体实施方式
34.下面结合附图并举实施例,对本发明进行详细描述。
35.本实施例提供了一种多结构可变形柔性附顶式无人机,参见附图1-3,包括:机架1、两个以上柔性体2、两个以上螺旋桨3、与柔性体2等数量的变形控制机构4、动力电池5、飞行控制模块7和相机8;
36.本实施例中优选柔性体2的数量为三个,螺旋桨3的数量也为三个;
37.三个所述柔性体2、三个螺旋桨3、动力电池5、飞行控制模块7和相机8均安装在机架1上,所述动力电池5为所述飞行控制模块7、螺旋桨3和变形控制机构4供电;
38.柔性体2的端面与机架1的边缘铰接,柔性体2可发生相对于机架1的转动,三个所述变形控制机构4一一对应安装在柔性体2与机架1的铰接处;当柔性体2收拢至其端面与机架1平行时,柔性体2位于极限位置ⅰ;当柔性体2展开至其端面与机架1垂直时,柔性体2位于极限位置ⅱ;飞行控制模块7通过控制变形控制机构4,来控制柔性体2在极限位置ⅰ和极限位置ⅱ之间的角度范围内、相对机架1的转动与固定;柔性体2内部填充有氦气,柔性体2的总浮力大于无人机整体的重力;
39.飞行控制模块7还用于控制螺旋桨3的旋转;所述相机8用于执行侦察记录图像。
40.所述一种多结构可变形柔性附顶式无人机还包括定位装置6,所述定位装置6安装在机架1上,且内嵌有gps系统。
41.其中,动力电池5、定位装置6、飞行控制模块7和相机8的安装、螺旋桨3的旋转以及柔性体2的展开与收拢三者之间互不干涉。
42.所述机架1为平板结构,本实施例优选为平面的六边形框架结构,六边形框架结构包括三个等长度的长边和三个等长度的短边,三个长边与三个短边间隔设置,机架1上加工有三个梯形的孔,用于减重和减少无人机升降时的空气阻力;三个螺旋桨3与三个柔性体2在机架1上沿圆周间隔设置,且均匀分布。
43.所述柔性体2为柱状壳体,所述柱状壳体的横截面为三角形,三角形的三个顶点为圆角过渡,三个柔性体2均安装在机架1的一侧,每个柔性体2的一个端面均与所述机架1的相应短边铰接,三个柔性体2均在极限位置ⅰ时,三个柔性体2的端面围成一个等边三角形的轮廓,所述轮廓的中心沿柔性体2的长度方向延伸形成一个空间,用于容置相机;所述柔性体2材料采用ptfe塑料;
44.三个所述螺旋桨3一一对应安装在机架1的长边的中点处,每个所述螺旋桨3内均设置有无刷电机,无刷电机通过相应的电机底座与机架1连接,飞行控制模块7通过控制无刷电机的启停控制螺旋桨的旋转。
45.工作原理:
46.无人机工作前,先向柔性体2内充入氦气,使柔性体2的浮力大于无人机系统的重力。
47.无人机工作时,包括以下三种模式:
48.(1)附顶待机模式:当无人机飞至指定位置,关闭螺旋桨,螺旋桨不工作,由于柔性体2的浮力大于无人机系统的重力,使得无人机系统能够依靠自身浮力附顶停靠,即无人机由于浮力的作用,其顶部可以附着于建筑物的下表面停靠,此时,动力电池无需负责无人机系统的重力消耗;
49.(2)飞行机动模式:飞行机动模式包括悬停、水平机动、垂直机动和前进中上升等行为,当无人机需要进入机动模式时,飞行控制模块7、无刷电机和变形控制机构4通电,飞行控制模块7通过指令控制无刷电机的运转,从而控制螺旋桨3的旋转,为无人机提供机动所需力和力矩。此时,由于动力电池无需负责无人机系统的重力消耗,只需输出较小的功率就可以进行机动,极大减少无人机飞行的耗电,从而使续航时间成倍增加,使无人机能携带较少电池下长时间的进行作业,如室内巡逻监控、未知地形的长时间侦查勘测等,同时,较小的功率驱动可无人机系统实现静音飞行,大大提高隐蔽性。
50.(3)柔性体变形模式:当无人机在广阔区域飞行的工况下,飞行控制模块7发送指令给变形控制机构4,变形控制机构4接收指令带动柔性体2展开至极限位置ⅱ并固定,以增加附顶面积,提高无人机系统稳定性及隐蔽性;当无人机在狭窄区域飞行的工况下,如室内可飞行区域少和穿越通道狭窄等的工况下,飞行控制模块7发送指令给变形控制机构4,变形控制机构4接收指令控制柔性体2收拢至能满足工况通过要求并固定,以减少触障面积,提高无人机系统灵活性。
51.综上,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1