一种污染耕地整治用野外勘测装置的制作方法
1.本发明属于环境勘测领域,具体是一种污染耕地整治用野外勘测装置。
背景技术:
2.污染耕地是指受到大气酸雨或富含有毒有害物质水的侵蚀,恶化了土壤原有的理化性状和丧失了生产潜力的耕地,导致耕地上的农林副产品对人畜禽渔的危害。
3.其具体为有毒污染物通过大气、水和生物直接或间接地向耕地土壤排放,超过耕地土壤环境容量,从而打破了耕地土壤内部系统的平衡,引起土壤结构和功能发生变化。
4.随着社会的进步,对于新农村发展建设的越来越重视,为了加快新农村发展的速度,更好的治理污染耕地,人们发明了一些设备,其中就有用于污染耕地整治的野外地理环境监测装置;但是,经研究发现现有的污染耕地整治用野外勘测装置在使用时存在一定的弊端;现有的污染耕地整治用野外勘测装置采用人工携带一系列的测量仪器到现场进行拍摄,现场测量污染耕地的大致面积,土壤松软程度以及污染耕地的坡度等,其测量的项目多,需要相关施工人员携带大量的仪器,而且一般的污染耕地面积较大,工作人员需要进行多出测量,工作强度大,而且测量的精度不高,不满足人们的使用要求。
技术实现要素:
5.为了克服现有技术的不足,本技术实施例提供一种污染耕地整治用野外勘测装置其以无人机为主体,使用时采用无人机运动将反馈柱插入到污染耕地的边界,其能够自动根据反馈柱上定位器反馈的信号确定污染耕地的边界位置,能够直接计算出污染耕地的面积,该项测量工作无需工作人员现场处理,勘测比较方便。
6.本技术实施例解决其技术问题所采用的技术方案是:一种污染耕地整治用野外勘测装置,包括无人机主体、支撑架、调节箱和反馈柱;无人机主体的主体的下端面设置有缓冲组件;支撑架的上端与缓冲组件连接,支撑架的内部设置有安装板;调节箱的内部开设有若干组通口,调节箱上设置有调节通口大小的调节组件,调节箱与无人机主体的控制器固定连接;反馈柱的数量为若干组,反馈柱插接在通口的内部;其中,所述反馈柱的内部设置有定位器,反馈柱的外表面设置有刻度线。
7.本发明记载了一种污染耕地整治用野外勘测装置,其以无人机为主体,使用时采用无人机运动将反馈柱插入到污染耕地的边界,其能够自动根据反馈柱上定位器反馈的信号确定污染耕地的边界位置,能够直接计算出污染耕地的面积,该项测量工作无需工作人员现场处理,勘测比较方便。
8.优选的,所述支撑架的下端面固定安装有全景摄像头,所述支撑架的下端面固定
安装有安装架,所述安装架的下端面固定安装有激光测距装置。
9.本发明记载了一种污染耕地整治用野外勘测装置,其记载了激光测距装置,使用时其监测与地面的距离,同时无人机上自带的雷达能够显示其位于空中的高度,飞行时无人机保持高度不变,根据激光测距装置检测到的其与地面数据的差值即可判断其坡度,而且还可以保持激光测距装置测距数值不变,以相同的高度将反馈柱放下,使得反馈柱插入到地面上,通过刻度线判断反馈柱插入到地面的深度能够直接判断土壤的松软程度,使用比较方便。
10.优选的,所述缓冲组件包括固定板和缓冲柱;固定板位于无人机主体的下方,所述支撑架的上端面与固定板的下端面固定连接;缓冲柱的数量为若干组,若干组所述缓冲柱呈环形阵列分布,所述缓冲柱的两端分别与无人机主体的下端面和固定板的上端面固定连接。
11.缓冲柱可以采用电动车上的缓冲结构,其主要是降低无人机降落时与地面的冲击力,从而提高无人机的使用寿命。
12.优选的,所述调节组件包括电机、调节盘和限位件;电机固定安装在调节箱的上端面;调节盘转动安装在调节箱上开设有的中间槽中,所述电机的输出轴与调节盘的上端面固定连接;限位件的数量为若干组,限位件活动安装在调节箱内部开设的滑动区中。
13.使用时电机带动调节盘转动,调节盘转动时与限位件接触,使得限位件运动,使得限位件不与反馈柱接触,从而使得反馈柱掉落。
14.优选的,所述限位件的一端位于中间槽中,所述调节盘的外表面设置有凸块,所述调节盘转动时,凸块挤压限位件。
15.优选的,所述限位件包括安装块、限位块和弹性件;安装块固定安装在调节箱的内表面;限位块滑动安装在滑动区中;弹性件的两端分别与安装块和限位块连接。
16.使用时,使用时电机带动调节盘转动,带动凸块挤压限位块,使得限位块沿着滑动区滑动,从而使得条形口与通口重合部分变大,从而使得反馈柱掉落,插入到指定的地面上。
17.优选的,所述弹性件包括弹簧和引导杆,弹簧的两端分别与安装块和限位块固定连接;引导杆的一端固定安装在安装块上;其中,所述限位块上开设有引导口,所述引导杆的一端插接在引导口中。
18.引导杆与引导口插接,能够限定住限位块的运动方向,使用效果好,弹簧的设置方便下次限定住缓冲柱的位置。
19.优选的,所述限位块的上端面开设有条形口,所述条形口的内表面粘贴有橡胶垫,所述条形口局部与通口重合,所述缓冲柱的下端穿过条形口和通口。
20.橡胶垫的设置能够降低限位块与缓冲柱接触时产生的磨损。
21.优选的,所述反馈柱的下端呈锥形,所述反馈柱的外表面靠近上端位置设置有环形遮挡块。
22.反馈柱的下端呈锥形,能够方便插入到地面上,环形遮挡块的设置能够避免反馈柱全部插入到地面中,方便拔取。
23.优选的,所述反馈柱的上端面设置有声光报警器,所述反馈柱的内部设置有无线模块。
24.本发明记载了一种污染耕地整治用野外勘测装置,其记载了反馈柱,使用时反馈柱插入在地面上,在污染耕地整治过程中可以远程启动声光报警器警示周边人员,避免周边人员靠近,使用比较方便,而且反馈柱上定位器和声光报警器的设置还能够帮助工作人员寻找其位置,方便污染耕地整治后回收,使用效果好。
25.综上所述,本发明包括以下至少一种有益技术效果:一是、本发明记载了一种污染耕地整治用野外勘测装置,其以无人机为主体,使用时采用无人机运动将反馈柱插入到污染耕地的边界,其能够自动根据反馈柱上定位器反馈的信号确定污染耕地的边界位置,能够直接计算出污染耕地的面积,该项测量工作无需工作人员现场处理,勘测比较方便;二是、本发明记载了一种污染耕地整治用野外勘测装置,其记载了激光测距装置,使用时其监测与地面的距离,同时无人机上自带的雷达能够显示其位于空中的高度,飞行时无人机保持高度不变,根据激光测距装置检测到的其与地面数据的差值即可判断其坡度,而且还可以保持激光测距装置测距数值不变,以相同的高度将反馈柱放下,使得反馈柱插入到地面上,通过刻度线判断反馈柱插入到地面的深度能够直接判断土壤的松软程度,使用比较方便。
26.三是、本发明记载了一种污染耕地整治用野外勘测装置,其记载了反馈柱,使用时反馈柱插入在地面上,在污染耕地整治过程中可以远程启动声光报警器警示周边人员,避免周边人员靠近,使用比较方便,而且反馈柱上定位器和声光报警器的设置还能够帮助工作人员寻找其位置,方便污染耕地整治后回收,使用效果好。
附图说明
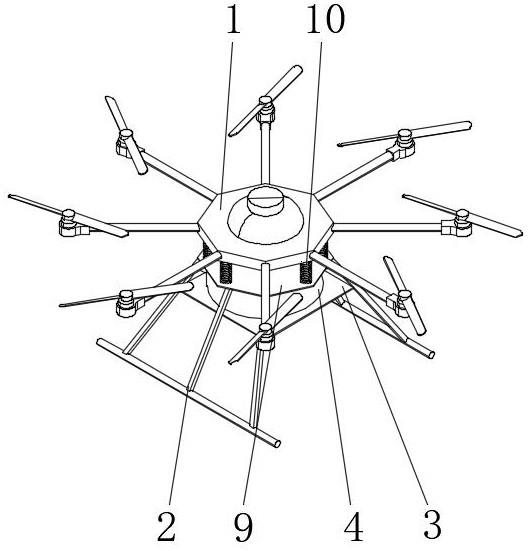
27.图1是本发明的整体结构示意图;图2是本发明的局部侧视结构图;图3是本发明中调节箱的结构图;图4是本发明中调节箱的内部局部结构图;图5是本发明中调节箱箱体的局部结构图;图6是本发明中限位件的局部结构图;图7是本发明中反馈柱的局部结构图。
28.附图标记:1、无人机主体;2、支撑架;3、安装板;4、调节箱;5、通口;6、反馈柱;7、安装架;8、激光测距装置;9、固定板;10、缓冲柱;11、电机;12、调节盘;13、中间槽;14、凸块;15、限位块;16、弹性件;17、安装块;18、条形口;19、环形遮挡块。
具体实施方式
29.本技术实施例通过提供一种污染耕地整治用野外勘测装置,解决现有的污染耕地整治用野外勘测装置采用人工携带一系列的测量仪器到现场进行拍摄,现场测量污染耕地的大致面积,土壤松软程度以及污染耕地的坡度等,其测量的项目多,需要相关施工人员携带大量的仪器,而且一般的污染耕地面积较大,工作人员需要进行多出测量,工作强度大,而且测量的精度不高,不满足人们的使用要求的问题,本发明污染耕地整治用野外勘测装置其以无人机为主体,使用时采用无人机运动将反馈柱插入到污染耕地的边界,其能够自动根据反馈柱上定位器反馈的信号确定污染耕地的边界位置,能够直接计算出污染耕地的面积,该项测量工作无需工作人员现场处理,勘测比较方便。
30.实施例1:一种污染耕地整治用野外勘测装置,如图1-图7所示,包括无人机主体1、支撑架2、调节箱4和反馈柱6;无人机主体1的主体的下端面设置有缓冲组件;支撑架2的上端与缓冲组件连接,支撑架2的内部设置有安装板3;调节箱4的内部开设有若干组通口5,调节箱4上设置有调节通口5大小的调节组件,调节箱4与无人机主体1的控制器固定连接;反馈柱6的数量为若干组,反馈柱6插接在通口5的内部;其中,反馈柱6的内部设置有定位器,反馈柱6的外表面设置有刻度线。
31.本发明记载了一种污染耕地整治用野外勘测装置,其以无人机为主体,使用时采用无人机运动将反馈柱6插入到污染耕地的边界,其能够自动根据反馈柱6上定位器反馈的信号确定污染耕地的边界位置,能够直接计算出污染耕地的面积,该项测量工作无需工作人员现场处理,勘测比较方便。
32.缓冲组件包括固定板9和缓冲柱10;固定板9位于无人机主体1的下方,支撑架2的上端面与固定板9的下端面固定连接;缓冲柱10的数量为若干组,若干组缓冲柱10呈环形阵列分布,缓冲柱10的两端分别与无人机主体1的下端面和固定板9的上端面固定连接。
33.缓冲柱10可以采用电动车上的缓冲结构,其主要是降低无人机降落时与地面的冲击力,从而提高无人机的使用寿命。
34.调节组件包括电机11、调节盘12和限位件;电机11固定安装在调节箱4的上端面;调节盘12转动安装在调节箱4上开设有的中间槽13中,电机11的输出轴与调节盘12的上端面固定连接;限位件的数量为若干组,限位件活动安装在调节箱4内部开设的滑动区中。
35.使用时电机11带动调节盘12转动,调节盘12转动时与限位件接触,使得限位件运动,使得限位件不与反馈柱6接触,从而使得反馈柱6掉落。
36.限位件的一端位于中间槽13中,调节盘12的外表面设置有凸块14,调节盘12转动时,凸块14挤压限位件。
37.限位件包括安装块17、限位块15和弹性件16;安装块17固定安装在调节箱4的内表面;限位块15滑动安装在滑动区中;弹性件16的两端分别与安装块17和限位块15连接。
38.使用时电机11带动调节盘12转动,带动凸块14挤压限位块15,使得限位块15沿着
滑动区滑动,从而使得条形口18与通口5重合部分变大,从而使得反馈柱6掉落,插入到指定的地面上。
39.弹性件16包括弹簧和引导杆;弹簧的两端分别与安装块17和限位块15固定连接;引导杆的一端固定安装在安装块17上;其中,限位块15上开设有引导口,引导杆的一端插接在引导口中。
40.引导杆与引导口插接,能够限定住限位块15的运动方向,使用效果好,弹簧的设置方便下次限定住缓冲柱10的位置。
41.限位块15的上端面开设有条形口18,条形口18的内表面粘贴有橡胶垫,条形口18局部与通口5重合,缓冲柱10的下端穿过条形口18和通口5。
42.橡胶垫的设置能够降低限位块15与缓冲柱10接触时产生的磨损,提高缓冲柱10的使用寿命。
43.反馈柱6的下端呈锥形,反馈柱6的外表面靠近上端位置设置有环形遮挡块19。
44.反馈柱6的下端呈锥形,能够方便插入到地面上,环形遮挡块19的设置能够避免反馈柱6全部插入到地面中,方便拔取。
45.实施例2:在实施例1的基础上,如图1-图7所示,本实施例为支撑架2的结构;支撑架2的下端面固定安装有全景摄像头,支撑架2的下端面固定安装有安装架7,安装架7的下端面固定安装有激光测距装置8。
46.本发明记载了一种污染耕地整治用野外勘测装置,其记载了激光测距装置8,使用时其监测与地面的距离,同时无人机上自带的雷达能够显示其位于空中的高度,飞行时无人机保持高度不变,根据激光测距装置8检测到的其与地面数据的差值即可判断其坡度,而且还可以保持激光测距装置8测距数值不变,以相同的高度将反馈柱6放下,使得反馈柱6插入到地面上,通过刻度线判断反馈柱6插入到地面的深度能够直接判断土壤的松软程度,该刻度线数值可以直接通过无人机拍摄获取,当拍摄到环形遮挡块19接触地面时,标记该处,远程启动语音播放器警示周边人,使用比较方便。
47.实施例3:在实施例2的基础上,如图1-图7所示,本实施例为反馈柱6的结构;反馈柱6的上端面设置有声光报警器,反馈柱6的内部设置有无线模块。
48.反馈柱6上可以安装摄像头和语音播放器,能够实现远程观察和远程播报警示的效果,反馈柱6上还可以集成光伏组件为其内部的电子器件供电,反馈柱6的内部设置有电池为其内部的电子器件供电,其内部还集成有微处理器,其处理工作数据并且能够根据工作人员的控制数据操控整个反馈柱6的运行。
49.本发明记载了一种污染耕地整治用野外勘测装置,其记载了反馈柱6,使用时反馈柱6插入在地面上,在污染耕地整治过程中可以远程启动声光报警器警示周边人员,避免周边人员靠近,使用比较方便,而且反馈柱6上定位器和声光报警器的设置还能够帮助工作人员寻找其位置,方便污染耕地整治后回收,使用效果好。
50.需要说明的是,本发明一种污染耕地整治用野外勘测装置,使用时,勘测人员远程操控无人机主体1运行,使得无人机主体1沿着污染耕地的边缘飞行,
飞行过程中电机11启动,电机11带动调节盘12转动,调节盘12转动时带动凸块14与限位块15接触,推动限位块15运动,使得条形口18与通口5的重合面积变大,从而使得缓冲柱10落下,使得缓冲柱10插入到地面中,然后定位器将其位置信号发送给操作人员,操作人员根据各个点位的数据确定范围,确定面积;使用时无人机主体1上的激光测距装置8,监测与地面的距离,同时无人机上自带的雷达能够显示其位于空中的高度(相较于水平面的高度,其属于现有技术),飞行时无人机保持水平面的高度不变,根据激光测距装置8检测到的其与地面数据的差值即可判断其坡度,而且还可以保持激光测距装置8测距数值不变,距离地面相同高度的位置将反馈柱6放下,使得反馈柱6插入到地面上,通过刻度线判断反馈柱6插入到地面的深度能够直接判断土壤的松软程度,测量比较全面;在污染耕地整治过程中可以远程启动声光报警器警示周边人员,避免周边人员靠近,使用比较方便。
51.最后应说明的是:显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1