飞行器推进系统的制作方法
飞行器推进系统
1.本公开涉及一种用于飞行器的推进系统以及包括该推进系统的飞行器。
2.已经提出了用于飞行器的电力推进系统,其中采用一个或多个电动马达来驱动一个或多个推进器。混合推进系统也是已知的,其中使用气体涡轮引擎或其他内燃机协同电动马达来驱动推进器。“并行混合”系统与所谓的“串联混合系统”的区别可在于,在并行混合系统中,在内燃机和至少一个推进器之间设置机械连接,其中至少一个电动马达驱动与由内燃机驱动的推进器相同的推进器或驱动另一推进器。在“串联混合”中,内燃机不与任何推进器机械联接,而只是驱动发电机以向一个或多个马达供应电力。
3.根据第一方面,提供了一种飞行器推进系统,该飞行器推进系统包括:
4.推进器;
5.电动马达;和
6.减速齿轮箱,该减速齿轮箱在输入侧处联接到原动机,并且在输出侧处联接到该推进器,该减速齿轮箱被配置为提供输入与输出之间的减速比;其中
7.该减速齿轮箱被配置为使得该输入侧沿着与该输出侧相反的方向旋转,并且该原动机、该马达、该推进器和该减速齿轮箱被配置为使得该推进器、该马达、该原动机和该减速齿轮箱在飞行器操纵和/或推进系统故障期间所产生的陀螺力基本上被消除。
8.有利地,通过对马达和推进器进行反向旋转,并且通过以特定方式布置马达、齿轮箱和推进器质量分布和减速齿轮装置,可以基本上消除在飞行器操纵期间的陀螺力。这可以减少使用中的弯曲力,从而可以减少疲劳并增加飞行器寿命。此外,减少了对抗这些力的通常需要的结构质量,从而减少了推进系统的重量。
9.原动机可以包括马达和/或内燃机,诸如气体涡轮引擎。马达可以设置在减速齿轮箱的输入侧或输出侧上。
10.该减速齿轮箱可以包括呈恒星齿轮箱形式的周转齿轮箱,该周转齿轮箱包括限定该输入侧的太阳齿轮、与该太阳齿轮啮合的一个或多个行星齿轮、被配置为能够旋转地安装该行星齿轮的静态安装的行星架,以及与该行星齿轮啮合的环形齿轮,该环形齿轮被配置为旋转以限定该输出侧。有利地,在单个单元中,输入侧和输出侧旋转方向是反向的,并且提供减速比。
11.该推进系统可以包括各自联接到相应的行星齿轮的一个或多个另外的电动马达。有利地,可以消除或减少陀螺力,并同时增加设计自由度,因为另外的马达可用于补充电力,同时还增加了齿轮箱的转动惯量。因此,设计者可以适应更宽范围的马达尺寸和减速比。
12.该推进系统可以包括联接到该齿轮箱的输出侧的另外的电动马达。有利地,可以消除或减少陀螺力,并同时增加设计自由度,因为另外的马达可以用于补充电力,同时还增加了风扇的输出侧的转动惯量。因此,与采用单个马达的情况相比,设计者可以适应更宽范围的马达尺寸和减速比。
13.该齿轮箱可包括介于1.5:1与3.5:1之间的减速比。
14.该电动马达可以包括轴向磁通马达和径向磁通马达中的一者。该电动马达可包括
位于定子径向内侧的转子,或位于定子径向外侧的转子。
15.该推进器可包括开式转子螺旋桨或导管风扇中的一者。
16.该马达、该推进器和该减速齿轮箱可被配置为使得在给定输入和输出转速下,顺时针旋转部件的总角动量在逆时针旋转部件的总角动量之和的50%内。因此,顺时针旋转部件和逆时针旋转部件的角动量基本上被消除,从而减少或基本上消除了陀螺力。
17.优选地,在给定输入和输出转速下,顺时针旋转部件的总角动量在逆时针旋转部件的总角动量之和的20%内,优选地在10%内,并且更优选地在5%内。
18.根据本发明的第二方面,提供了一种设计飞行器推进系统的方法,该方法包括:
19.限定推进器;
20.限定马达;以及
21.限定减速齿轮箱,该减速齿轮箱在输入侧处联接到该马达,并且在输出侧处联接到该推进器,该减速齿轮箱被配置为提供输入与输出之间的减速比,该减速齿轮箱被配置为使得该输入侧沿着与该输出侧相反的方向旋转;以及
22.将该马达、该推进器和该减速齿轮箱设计成使得该推进器、该马达和该减速齿轮箱在飞行器操纵和/或推进系统故障期间所产生的陀螺力基本上被消除。
23.本领域的技术人员将理解,除非相互排斥,否则关于任何一个上述方面描述的特征如作适当变动,可以应用于任何其他方面。此外,除非相互排斥,否则本文中描述的任何特征可以应用于任何方面以及/或者与本文中描述的任何其他特征组合。
24.现在将参考附图仅以举例的方式来描述实施方案,其中:
25.图1是包括推进系统的第一飞行器的平面图;
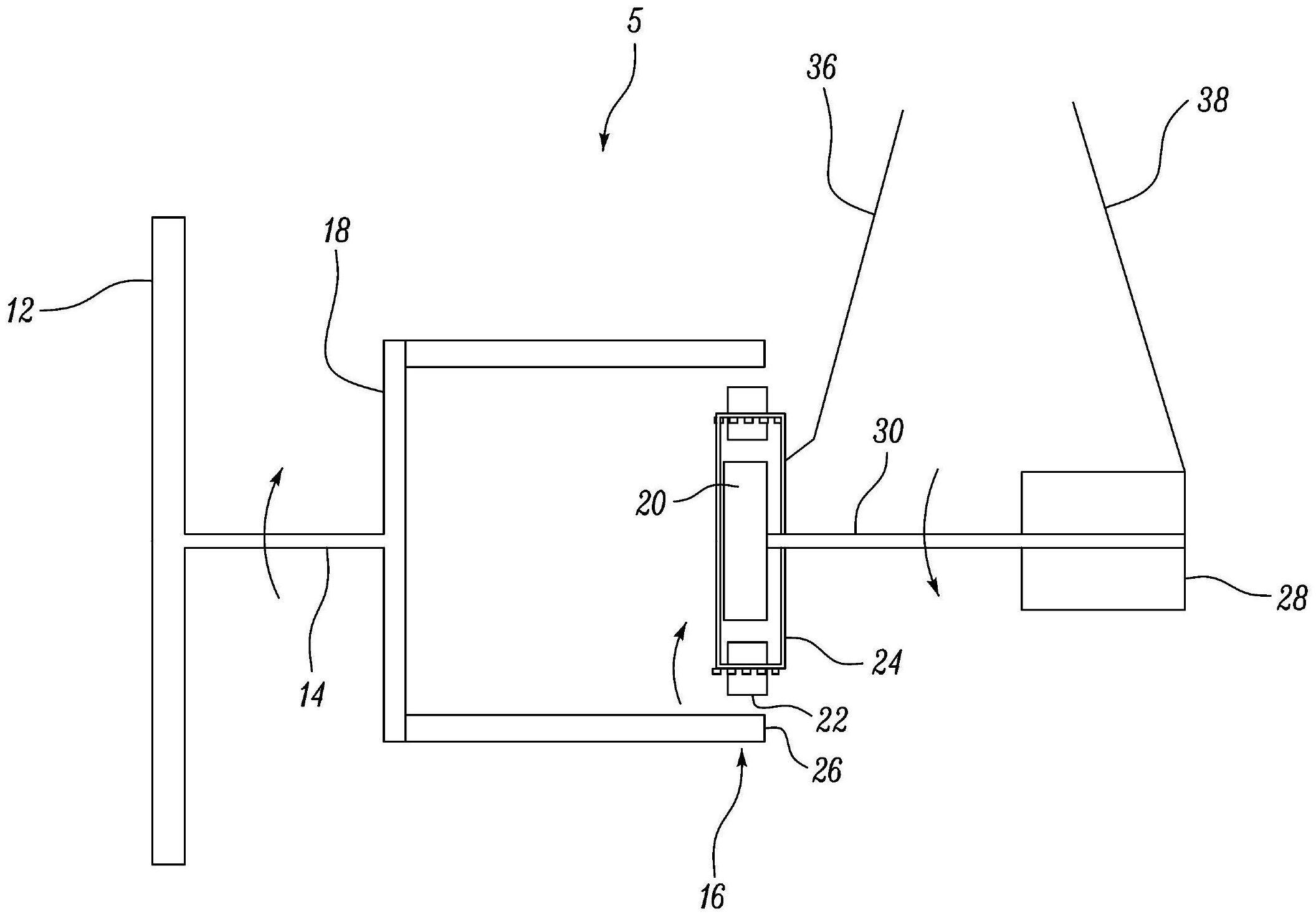
26.图2是用于图1的飞行器的推进系统的示意图;
27.图3是用于图1的飞行器的另选推进系统的示意图;
28.图4是用于图1的飞行器的另一另选推进系统的示意图;
29.图5是适用于图2至图4中任一附图所示的推进系统的电动马达的示意性侧视图;
30.图6是适用于图2至图4中任一附图所示的推进系统的另选电动马达的示意性侧视图;
31.图7是适用于图2至图4中任一附图所示的推进系统的另一另选电动马达的示意性侧视图;
32.图8是用于图1的飞行器的并行混合推进系统的示意图;
33.图9是用于图1的飞行器的另选并行混合推进系统的示意图;并且
34.图10是用于图1的飞行器的另一另选并行混合推进系统的示意图。
35.参考图1,示出了飞行器1。该飞行器具有常规构型,具有机身2、翼部3、尾部4和一对推进系统5。推进系统5中的一个在图2中详细示出。
36.图2示意性地示出了推进系统5。推进系统5包括推进器12。在该实施方案中,推进器12包括开式转子螺旋桨,但可以另选地包括导管风扇。推进器5由电能量源供电。在该实施方案中,能量源包括电池56,该电池继而由通过气体涡轮引擎60驱动的发电机58充电。因此,飞行器可以被认为是“串联混合”飞行器。
37.推进器12被配置为为飞行器1提供推力,并且通过在使用中提供旋转的轴承(未示出)联接到风扇轴14。风扇轴14继而联接到减速齿轮箱16的输出轴18。
38.减速齿轮箱16呈周转恒星齿轮箱的形式,包括太阳齿轮20、与太阳齿轮啮合的一个或多个行星齿轮22、被配置为能够旋转地安装行星齿轮22的行星架24,以及与行星齿轮22啮合的环形齿轮26。太阳齿轮20设置在径向内部位置处,环形齿轮26设置在径向外部位置处,并且行星齿轮22设置在该两者之间。
39.减速齿轮箱16被配置为恒星齿轮箱,其中太阳齿轮20、行星齿轮22和环形齿轮26中的每一者被安装成围绕其相应轴线旋转,而行星架24是静态安装的,使得行星齿轮22不围绕太阳齿轮20进动。设置合适的轴承布置(未示出),以允许每个部件旋转,同时提供必要的支撑。太阳齿轮20用作输入。环形齿轮26用作输出,因此经由输出轴18联接到风扇12。在输入与输出之间设置减速比,该减速比等于环形齿轮齿数除以太阳齿轮齿数。在一个示例中,该减速比为约3:1,并且通常介于1.5与3.5:1之间。
40.推进系统5还包括呈电动马达28形式的原动机,该电动马达被配置为经由减速齿轮箱16驱动推进器12。马达28为常规类型,诸如感应或永磁体电机。在本实施方案中,马达28经由太阳齿轮20和输入轴30联接到风扇12。图5至图7中示出了合适的电动马达类型。在图5所示的示例中,电动马达包括“内转”径向磁通永磁体电动马达,其包括围绕轴线x旋转的永磁体转子32。转子32被定子34环绕,该定子设置在转子32的径向外侧,由气隙36隔开。定子34包括电绕组(未示出),该电绕组可被通电以产生旋转磁场。这种旋转磁场与由转子32的永磁体产生的磁场相互作用,以引起旋转。由于转子32和定子34之间的磁通沿径向穿过气隙36。
41.电动马达28联接到呈化学电池、燃料电池和电容器中的一个或多个形式的储能装置(未示出),该储能装置在运行期间为电动马达28提供电力。在一些情况下,可以为每个推进系统5提供多个储能系统,这些储能系统可为不同类型(化学电池、燃料电池等)。在其他情况下,可以为多个推进系统提供公共储能装置。
42.如图2所示,推进系统包括第一撑杆36和第二撑杆38。第一撑杆36将齿轮箱行星架24安装到飞行器挂架或其他适当的静态结构,而第二撑杆38将马达28安装到飞行器静态结构。
43.图6示出了另一合适的电动马达128。在这种情况下,马达是“外转”径向磁通电动马达。马达128类似于马达28,但转子132和定子134是反向的,使得定子134位于转子132的径向内侧。
44.类似地,图7示出了另一合适的电动马达228。在这种情况下,电动马达包括具有转子232和定子234的“轴向磁通”电动马达。转子和定子沿轴向方向间隔开,其中气隙236在该两者之间延伸。由于磁通沿轴向方向穿过气隙,因此马达228被描述为轴向磁通机。
45.在每种情况下,马达转子32、132、232的转速高于风扇12的转速。电机通常受限于其扭矩密度(即,其最大扭矩除以其重量)而不是其功率密度(即,其最大功率除以其重量)。因此,期望以高转速操作电机,从而使由马达28、128、228产生的机械功率最大化。另一方面,期望使风扇12以相对较低的转速旋转,以便使风扇叶尖速度最小化,从而减少空气动力损耗。因此,减速齿轮箱16使得马达28能够以比风扇12高的速率转动。然而,齿轮箱16导致整体推进系统5重量增加,并且还表示传输损耗(通常在马达电力的约1%的范围内)。因此,可能难以确定直接驱动还是减速齿轮箱更可取。然而,发明人已经确定,如果某些标准适用(如下文所阐述),减速齿轮箱使得整体系统重量减少。
46.应注意,推进系统5包括若干旋转部件。这些部件包括风扇12、风扇轴14、输出轴18、环形齿轮26、行星齿轮22、太阳齿轮20、马达轴30和马达转子32。轴承还表示旋转部件,但在该示例中,鉴于它们的质量相对较低,可被忽略不计。这些部件中的每个部件都将产生陀螺力矩,即抵抗沿垂直于旋转轴线的方向转动的力。在飞行器操纵(诸如偏航、俯仰或翻滚)的情况下,此陀螺力矩将抵抗飞行器1施加在推进系统5上的转动力矩。这继而将对结构部件产生弯曲力,特别是对撑杆36、38。因此,操纵速度越快,旋转部件的转动惯量越大,力也将越大。
47.这些力尤其在两种情况下发挥作用。在起飞时,飞行器快速旋转(即,沿俯仰轴线枢转)。在这种情况下,马达28和风扇12将以高速运转,因此施加在撑杆36、38和其他结构上的力将很高。
48.单独地,在旋转部件突然停止的情况下,转动惯性力也会发挥作用。例如,在风扇轴断裂或齿轮箱卡滞的情况下,一个或多个旋转部件可能突然加速或减速。这种突然加速将导致施加到静态结构36、38的大的扭转力矩,必须再次对此做出反应。
49.因此,静态部件36、38必须在多个方向上对载荷做出反应,包括扭转方向和枢转方向。鉴于推进系统5中的大的转动惯量,这些载荷可能很高。
50.然而,发明人已发现,通过仔细设计马达28、风扇12和齿轮箱16,可以使这些陀螺力矩和惯性力矩最小化。
51.在本公开中,齿轮箱16被布置成使得输入侧(包括太阳齿轮20、马达轴30和马达转子32)沿第一公共方向旋转(其可根据需要为顺时针或逆时针的)。这由图2中的向下指示箭头示出。由于齿轮箱16是恒星齿轮箱构型,其中行星架24保持静止,并且环形齿轮26用作输出,齿轮箱16的输出侧沿与输入侧相反的方向旋转。在这种情况下,齿轮箱16的输出侧的旋转部件包括风扇12、风扇轴14、齿轮箱输出轴18和环形齿轮26。行星齿轮22也沿与输出侧相同的方向旋转。
52.旋转部件12、14、18、26、20、22、30、32中的每个旋转部件具有对应的质量惯性矩(转动惯性矩),即相对于距轴线距离的第二质量矩。在旋转时,旋转部件各自具有角动量,并且推进系统整体将具有等于旋转部件12、14、18、26、20、22、30、32的各个角动量的矢量和的总角动量。
53.如将理解的,施加在静态结构36、38上的陀螺力与旋转部件的角动量有关。通过使总角动量最小化,优选地将其减小至接近零,从而使陀螺力最小化。这将允许静态结构36、38更弱,从而更轻。
54.用于减小总角动量的第一种方法将是减小部件12、14、18、26、20、22、30、32的质量或将这些部件设计成使得质量以较小直径承载。然而,这严重限制了设计自由度。例如,期望具有大的风扇12直径,以提高推进效率。类似地,对于给定的功率输出,小直径的马达必须更快地旋转,这可能增加所需的齿轮减速以实现期望的风扇转速。
55.发明人已发现,可以通过布置一些部件沿第一方向(例如,顺时针)旋转并且其他部件沿第二方向(例如,逆时针)旋转来消除陀螺力。
56.在本公开中,太阳齿轮20、马达轴30和马达转子32沿顺时针方向旋转,并且风扇12、风扇轴14、齿轮箱输出轴18、行星齿轮22和环形齿轮26沿逆时针方向旋转。通过布置这些部件的质量、相对转速(通过改变齿轮减速比)和径向质量分布,可以以给定转速基本上
消除陀螺力。由于输入侧与输出侧之间的速度关系通常是固定的(鉴于减速齿轮箱16具有固定减速比),因此对于基本上任何转速,都可以消除陀螺力。
57.在一个示例中,风扇12、风扇轴14、齿轮箱输出轴18、行星齿轮22和环形齿轮26的转动惯量等于太阳齿轮20、马达轴30和马达转子32的转动惯量的两倍,并且齿轮箱16被布置成具有2:1的减速比。因此,由于顺时针旋转部件的转速是逆时针旋转部件的转速的两倍,而顺时针旋转部件的转动惯量是逆时针旋转部件的转动惯量的一半,输入侧和输出侧的角动量在任何给定旋转速度下相等且相反,因此陀螺力被完全消除。
58.在实施过程中,设计者可以调整各种部件的质量分布和减速比,以实现期望的特征组合,同时基本上消除陀螺力或至少使陀螺力最小化。
59.在实施过程中,可能不必完全消除陀螺力,并且甚至可能不是期望的。例如,布置系统以完全消除陀螺力可能导致非期望的折衷(例如,非最佳减速比、非最佳风扇直径、齿轮箱直径、非最佳马达速度等)。因此,发明人已发现,期望将陀螺力减小到所有部件都沿同一方向旋转时的力的20%以下。换句话说,旋转部件被配置为使得在给定旋转速度下,推进器、马达和减速齿轮箱的顺时针旋转部件的角动量之和在推进器、马达和减速齿轮箱的每个逆时针旋转部件的角动量之和的20%内。换句话说,将旋转部件的角动量的矢量和与在给定速度下旋转部件的角动量的绝对值(忽略由于相反旋转方向而产生的不同符号)之和进行比较。如果矢量和小于绝对值之和的20%,则可以说陀螺力基本上被消除。
60.在一些情况下,陀螺力可能需要在更大程度上被消除,例如在给定速度下的旋转部件的绝对值之和的1%与10%之间,或在给定速度下的旋转部件的绝对值之和的1%与5%之间。
61.图3示出了另选的推进系统305。系统305类似于系统5,并且包括由风扇轴314驱动的推进式风扇312,该风扇轴继而由恒星减速齿轮箱316驱动,该恒星减速齿轮箱继而经由输入轴330由第一电动马达328驱动。该推进系统由静态安装系统336、338安装。上述部件中的每个部件类似于系统5的那些部件,因此不进一步详细描述。
62.推进系统305还包括第二马达340,该第二马达经由风扇轴314联接到风扇312,并因此沿着与风扇312相同并且与第一马达328转动的方向相反的方向旋转。
63.应当理解,推进系统305现包括风扇312、风扇轴314、输出轴318、环形齿轮326、行星齿轮322,以及附加地,沿第一方向旋转的第二马达340。该系统还包括太阳齿轮320、马达轴330和沿第二方向旋转的第一马达328。
64.因此,系统305可以被布置成消除如上所述的陀螺力。提供沿与第一马达328相反的方向旋转的第二电动马达340允许设计者在选择马达328、340尺寸和速度时具有附加的设计自由度,这可以实现较少折衷的设计,同时还基本上消除陀螺力。
65.图4示出了另一另选的推进系统405。该系统405类似于系统5、305,并且包括由风扇轴414驱动的推进式风扇412,该风扇轴继而由恒星减速齿轮箱416驱动,该恒星减速齿轮箱继而经由输入轴430由第一电动马达428驱动。推进系统405由静态安装系统436、438安装。上述部件中的每个部件类似于系统5的那些部件,因此不进一步详细描述。
66.推进系统405还包括第二马达442和第三马达444,其各自经由相应行星齿轮422联接到齿轮箱416,因此沿着与风扇412相同并且与第一马达428转动的方向相反的方向旋转。
67.应当理解,推进系统405现包括风扇412、风扇轴414、输出轴418、环形齿轮426、行
星齿轮422,以及附加地,沿第一方向旋转的第二马达442和第三马达444。该系统还包括太阳齿轮420、马达轴430和沿第二方向旋转的第一马达428。应当理解,附加的马达可以被设置为联接到每个行星齿轮,并且被配置为与每个行星齿轮一起旋转,其中存在附加的行星齿轮。
68.同样,系统405可以被布置成消除如上所述的陀螺力。提供沿着与第一马达428相反的方向旋转的第二电动马达442和第三电动马达444同样允许设计者在选择马达428尺寸和速度时具有附加的设计自由度,这可以实现较少折衷的设计,同时也基本上消除了陀螺力。
69.因此,提供了一种推进系统,该推进系统在操纵和破损期间具有减小的结构载荷,从而允许结构重量减轻。设计者可以根据以下设计方法设计此类推进系统,如下所述。
70.设计者可以设计推进器、马达和联接到该马达的减速齿轮箱中的一者位于输入侧处,并且推进器位于输出侧处。如上所述,减速齿轮箱被配置为提供输入与输出之间的减速比,并且被配置为使得输入侧沿着与输出侧(例如,恒星齿轮箱)相反的方向旋转。
71.然后设计者修改马达、推进器和减速齿轮箱的设计,使得推进器、马达和减速齿轮箱在飞行器操纵和/或推进系统故障期间所产生的陀螺力基本上被消除。这通过改变旋转部件的直径、质量和质量分布以及减速齿轮箱的齿轮比来确保,直到实现期望的陀螺力消除为止。
72.所公开的布置还可以应用于并行推进系统505,诸如图8所示。
73.图8的推进系统505包括推进器512,该推进器联接到风扇轴514、恒星齿轮箱516、马达轴530和马达528,它们以与第一实施方案类似的方式布置。联接到马达轴520的还有原动机,该原动机包括呈气体涡轮引擎560形式的内燃机。该气体涡轮引擎是单轴式气体涡轮引擎560,其包括以正常方式布置的压缩机562、燃烧器564和涡轮566。压缩机562向燃烧器564供应压缩空气,该燃烧器加热空气,并且向涡轮566提供高温空气。然后,涡轮566经由马达轴530驱动压缩机562和马达528。
74.因此,风扇512由气体涡轮引擎涡轮566和马达528中的一者或两者驱动。如将理解的,与推进系统5、305、405相比,推进系统505包括位于输入侧的附加旋转部件,即压缩机562和涡轮566,它们均沿着与轴530相同的方向旋转。
75.在该实施方案中,齿轮箱减速比、齿轮箱部件、风扇、齿轮箱、马达28、压缩机以及涡轮质量和质量分布被布置成使得通过输入侧上的旋转质量(即涡轮566、压缩机562、马达528、轴530和太阳齿轮)施加在系统上的陀螺力被输出侧上的质量(行星齿轮、环形齿轮、轴514和风扇512)消除。
76.图9示出了图8的并行混合推进系统的变型。
77.在图9的推进系统605中,马达628设置在齿轮箱616的输出侧上,而气体涡轮引擎660设置在输入侧上。如将理解的,气体涡轮引擎旋转部件现以与马达628相反的方向旋转。另外,马达628以与风扇612相同的速度旋转。鉴于输出侧上的旋转质量增加以及输入侧上的旋转质量减小,这可以有助于平衡输入侧和输出侧相对于图8所示布置的角动量,从而可以有助于设计者将推进系统605配置为基本上不具有陀螺力。
78.图10示出了并行混合推进系统的另一变型。
79.图10的推进系统与图9的推进系统类似,并且因此仅描述了差异。
80.在图10的系统中,气体涡轮引擎760包括双轴式反向旋转气体涡轮引擎。该气体涡轮引擎包括低压卷轴,该低压卷轴包括低压压缩机770、低压轴730和低压涡轮772。低压轴730联接到恒星减速齿轮箱716的输入侧。马达728和风扇712联接到齿轮箱716的输出侧。另外,还提供了一种高压卷轴,该高压卷轴包括高压压缩机774、高压轴776和高压涡轮778。两个卷轴反向旋转,从而至少部分地抵消了引擎760在操纵期间所产生的陀螺力。
81.同样,通过布置使用中的顺时针旋转部件和逆时针旋转部件以及减速齿轮比,使得基本上消除陀螺力,并且可以大幅降低操纵力。
82.应当理解,本发明不限于上述实施方案,并且在不脱离本文中描述的概念的情况下可进行各种修改和改进。除非相互排斥,否则任何特征可以单独使用或与任何其他特征组合使用,并且本公开扩展到并包括本文中描述的一个或多个特征的所有组合和子组合。例如,马达可以设置在具有双轴式气体涡轮引擎的推进系统的输入侧上。图5至图7的任何马达都可以与任何实施方案的任何推进系统的任何马达一起使用。类似地,安装在如图3和图4所示位置的附加马达可以设置在图8和图9所示的布置中。
83.可采用不同类型的马达,诸如感应马达。可以采用不同类型的原动机,诸如活塞引擎,来代替气体涡轮引擎。在原动机包括马达的情况下,可以省略气体涡轮引擎,其中飞行器完全由电池或燃料电池供电。
84.类似地,可以采用不同类型的齿轮箱。例如,齿轮箱可以包括阶梯式齿轮箱、差速齿轮箱或其中输入和输出旋转方向为反向的任何合适的齿轮箱。在一些示例中,齿轮箱可以包括增速齿轮箱,其中输出速度比输入速度快。在其他情况下,输入速度和输出速度可为相等的。类似地,减速比可以大于给出的示例,并且可以将若干齿轮箱类型组合起来。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1