一种旋翼无人机用电机驱动系统
1.本发明涉及旋翼无人机用电机驱动系统,尤其涉及一种电机驱动系统。
背景技术:
2.近年来,旋翼无人机受到越来越多的重视,其广泛用于测绘、航拍、无人机物流送货等新兴场合,尤其是无人机物流送货领域要求无人机具备尽可能高的负载能力以输送更重的货物,这就要求旋翼无人机的电机驱动系统能够产生更强的推力气流。
3.然而现有的旋翼无人机用电机驱动系统多采用单电机转子驱动的单旋翼叶片结构,因受到电机结构限制产生的推力气流上升空间有限,同时电机驱动系统的功率密度也较低,因此进一步提升旋翼无人机用电机驱动系统的推力气流以及提升电机驱动系统的功率密度成为亟待解决的课题。
技术实现要素:
4.本发明为了克服以上不足,提供了一种既能有效提升旋翼无人机用电机驱动系统的推力气流,又能增加电机驱动系统的功率密度的旋翼无人机用电机驱动系统。
5.为了解决上述技术问题,本发明的技术方案是:一种旋翼无人机用电机驱动系统,包括电机与多个旋翼叶片,电机为单定子四转子的轴向磁通电机,定子位于中间,定子左侧设置有一个第一调制转子与一个第一永磁转子,第一调制转子位于第一永磁转子与所述定子之间,定子右侧设置有一个第二调制转子与一个第二永磁转子,第二调制转子位于第二永磁转子与所述定子之间,定子包括定子轭与定子齿,所述定子轭左侧设置了第一定子齿,右侧设置了第二定子齿,所述第一定子齿上固定有第一绕组与第二绕组,所述第二定子齿上固定有第三绕组与第四绕组,所述第一永磁转子通过第一转轴固定连接第一旋翼叶片,所述第一调制转子通过第二转轴固定连接第二旋翼叶片,所述第二永磁转子通过第三转轴固定连接第三旋翼叶片,所述第二调制转子通过第四转轴固定连接第四旋翼叶片,四个所述旋翼叶片产生的推力气流方向相同。
6.进一步的,所述第一转轴与所述第二转轴的旋转方向相反,所述第三转轴与所述第四转轴的旋转方向相反,所述第一旋翼叶片与所述第二旋翼叶片相互逆向旋转时产生的推力气流方向相同,所述第三旋翼叶片与所述第四旋翼叶片相互逆向旋转时产生的推力气流方向相同。
7.进一步的,所述第一定子齿包括第一主体齿部与第一辅助齿部,第一绕组与第二绕组分别固定在所述第一主体齿部与第一辅助齿部,所述第二定子齿包括第二主体齿部与第二辅助齿部,第三绕组与第四绕组分别固定在所述第二主体齿部与第二辅助齿部上,所述第一定子齿与所述第二定子沿定子周向错开一角度。
8.进一步的,所述定子轭采用整块钢盘加工而成,所述第一定子齿与所述第二定子齿均采用smc材料压制而成。
9.进一步的,所述第一绕组的极数与所述第二绕组的极数不同,所述第三绕组的极
数与所述第四绕组的极数不同,所述第一绕组与所述第三绕组为集中绕组,所述第二绕组与所述第四绕组为集中绕组或分布绕组。
10.进一步的,所述永磁转子采用磁钢沿切向磁化的永磁转子结构。
11.进一步的,所述调制转子包括多个调制块,所述调制块在轴向靠近永磁转子的一侧设置第一凸起,所述调制块在轴向靠近定子的一侧设置第二凸起,第一凸起与第二凸起之间设置有矩形部,矩形部的周向长度与轴向长度不变,所述第一凸起的轴向长度与所述调制块的轴向长度的比值在0.16-0.17之间且所述第一凸起的靠轴向外侧的周向长度与所述调制块的最大周向长度的比值在0.80-0.82之间,所述第二凸起的轴向长度与所述调制块的轴向长度的比值在0.16-0.17之间且所述第二凸起的靠轴向外侧的周向长度与所述调制块的最大周向长度的比值在0.87-0.88之间。
12.进一步的,第一永磁转子的极数与第二永磁转子的极数不同,第一调制转子的调制块个数与第二调制转子的调制块个数不同,第一主体齿部与第二主体齿部个数不同,第一辅助齿部与第二辅助齿部个数不同,第一至第四绕组的极数均不相同。
13.进一步的,所述第一辅助齿部与所述第二辅助齿部均为不等宽齿。
14.本发明提供的旋翼无人机用电机驱动系统,包括电机与多个旋翼叶片,电机为单定子四转子的轴向磁通电机,四个转子分别驱动四个旋翼叶片旋转,四个旋翼叶片同时旋转能够产生更大的推力气流,电机为单定子四转子的轴向磁通电机,永磁转子采用磁钢沿切向磁化的永磁转子结构,电机的功率密度较高,同时也降低了磁钢的使用量,降低整个电机驱动系统的成本。
附图说明
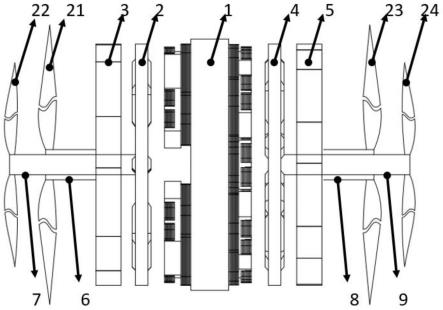
15.图1是旋翼无人机用电机驱动系统示意图;
16.图2是旋翼无人机用电机结构示意图;
17.图3是电机定子铁芯结构示意图;
18.图4是电机定子结构示意图;
19.图5是电机永磁转子结构示意图;
20.图6是电机调制转子结构示意图;
21.图7是调制转子的调制块三维示意图;
22.图8是调制转子的调制块沿转子轴向的俯视图;
23.图1-8中所示:1、定子;2、第一调制转子;3、第一永磁转子;4、第二调制转子;5、第二永磁转子;6、第一转轴;7、第二转轴;8、第三转轴;9、第四转轴;10、定子轭;11、第一主体齿部;12、第一辅助齿部;13、第二主体齿部;14、第二辅助齿部;15、磁钢;16、调制块;161、第一凸起;162、第二凸起;163、矩形部;17、第一绕组;18、第二绕组;19、第三绕组;20、第四绕组;21、第一旋翼叶片;22、第二旋翼叶片;23、第三旋翼叶片;24、第四旋翼叶片。
具体实施方式
24.下面结合附图对本发明作详细描述:
25.如图1-2所示,一种旋翼无人机用电机驱动系统,包括电机与多个旋翼叶片,电机为单定子四转子的轴向磁通电机,定子1位于中间,定子左侧设置有一个第一调制转子2与
一个第一永磁转子3,第一调制转子2位于第一永磁转子3与所述定子1之间,定子右侧设置有一个第二调制转子4与一个第二永磁转子5,第二调制转子4位于第二永磁转子5与所述定子1之间,定子包括定子轭10与定子齿,所述定子轭左侧设置了第一定子齿,右侧设置了第二定子齿,所述第一定子齿上固定有第一绕组17与第二绕组18,所述第二定子齿上固定有第三绕组19与第四绕组20,所述第一永磁转子3通过第一转轴6固定连接第一旋翼叶片21,所述第一调制转子2通过第二转轴7固定连接第二旋翼叶片22,所述第二永磁转子5通过第三转轴8固定连接第三旋翼叶片23,所述第二调制转子4通过第四转轴9固定连接第四旋翼叶片24,四个所述旋翼叶片产生的推力气流方向相同。
26.进一步的,所述第一转轴与所述第二转轴的旋转方向相反,可以平衡所述第一旋翼叶片与所述第二旋翼叶片产生的扭矩,所述第三转轴与所述第四转轴的旋转方向相反,可以平衡所述第三旋翼叶片与所述第四旋翼叶片产生的扭矩,使得无人机的飞行控制更稳定。所述第一旋翼叶片与所述第二旋翼叶片相互逆向旋转时产生的推力气流方向相同,所述第三旋翼叶片与所述第四旋翼叶片相互逆向旋转时产生的推力气流方向相同。
27.进一步的,如图3所示,所述第一定子齿包括第一主体齿部11与第一辅助齿部12,第一辅助齿部12设置在第一主体齿部11的端部,相邻第一主体齿部11之间形成第一绕组槽,相邻第一辅助齿部12之间形成第二绕组槽,如图4所示,第一绕组17与第二绕组18分别固定在所述第一定子齿的第一主体齿部11与第一辅助齿部12上,具体地,第一绕组17缠绕在第一主体齿部11上,第二绕组18根据设定的槽极配合,可以以集中绕组的形式缠绕在第一辅助齿部12上,或是以分布绕组的形式固定在第二绕组槽内。相应地,所述第二定子齿包括第二主体齿部13与第二辅助齿部14,第二辅助齿部14设置在第二主体齿部13的端部,相邻第二主体齿部13之间形成第三绕组槽,相邻第二辅助齿部14之间形成第四绕组槽,第三绕组19与第四绕组20分别固定在所述第二定子齿的第二主体齿部13与第二辅助齿部14上,具体地,第三绕组19缠绕在第二主体齿部13上,第四绕组20根据设定的槽极配合,可以以集中绕组的形式缠绕在第二辅助齿部14上,或是以分布绕组的形式固定在第四绕组槽内。所述第一定子齿与所述第二定子沿定子周向错开一角度,可以降低定子轭左右两侧的绕组之间的磁场耦合,方便独立控制四套绕组。
28.进一步的,所述定子轭采用整块钢盘加工而成,所述第一定子齿与所述第二定子齿均采用smc材料压制而成,可以简化定子的加工,降低生产成本。
29.进一步的,所述第一绕组的极数与所述第二绕组的极数不同,所述第三绕组的极数与所述第四绕组的极数不同,所述第一绕组与所述第三绕组为集中绕组,所述第二绕组与所述第四绕组为集中绕组或分布绕组。
30.进一步的,如图5所示,所述永磁转子的磁钢15沿切向磁化的永磁转子结构,相邻磁钢的充磁方向相反,在相邻磁钢之间设置铁芯,可以增大永磁转子产生的磁场,同时降低磁钢的用量,降低电机驱动系统的成本。
31.进一步的,如图6所示,所述调制转子包括多个调制块16,如图8所示,所述调制块16在轴向靠近永磁转子的一侧设置第一凸起161,所述调制块在轴向靠近定子的一侧设置第二凸起162,第一凸起161与第二凸起162之间设置有矩形部163,如图7所示矩形部163的周向长度与轴向长度al不变,通过采用有限元软件进行优化,在所述第一凸起161的轴向长度与所述调制块16的轴向长度的比值在0.16-0.17之间且所述第一凸起161的靠轴向外侧
的周向长度cl与所述调制块16的最大周向长度的比值在0.80-0.82之间,所述第二凸起162的轴向长度与所述调制块16的轴向长度的比值在0.16-0.17之间且所述第二凸起162的靠轴向外侧的周向长度cl与所述调制块16的最大周向长度的比值在0.87-0.88之间,可以减缓气隙磁场畸变,同时降低永磁转子与调制转子的转矩脉动,使得旋翼叶片产生的推力气流更稳定,无人机的飞行控制更稳定。
32.进一步的,第一永磁转子的极数与第二永磁转子的极数不同,第一调制转子的调制块个数与第二调制转子的调制块个数不同,第一主体齿部与第二主体齿部个数不同,第一辅助齿部与第二辅助齿部个数不同,第一至第四绕组的极数均不相同,此时,定子左侧的第一绕组与第二绕组与定子右侧的第三绕组与第四绕组可以实现解耦,方便对四个转子进行独立控制。
33.进一步的,所述第一辅助齿部与所述第二辅助齿部均为不等宽齿,具有主齿以及隔离齿,方便绕组之间的物理隔离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1