一种无人机安装防坠落绳索装置的制作方法
1.本发明涉及绳索装置技术领域,具体为一种无人机安装防坠落绳索装置。
背景技术:
2.随着超特高压电网的大力发展,供电可靠性的提高,人均维护线路公里数的不断加大,作业人员的工作量不断增大,超特高压输电线路因缺陷造成线路停电不仅仅经济损失巨大,且有很大的政治影响。超特高压线路具有高电压、强电场、铁塔高、档距大、部件机械荷载大、金具及绝缘子等部件结构大重量大等特点,随之带来一系列作业困难;现有对电力铁塔进行作业时,一人先将绳索通过爬梯爬到电力铁塔顶部,通过挂钩进行悬挂,将绳索放下,后续人员在通过绳索与保险衣进行攀爬,在第一人进行攀爬过程中没有保护措施,安全性较低,同时挂钩在使用过程中无法保证稳定性,为此,本领域的工作人员提出了一种无人机安装防坠落绳索装置。
技术实现要素:
3.针对现有技术的不足,本发明提供了一种无人机安装防坠落绳索装置,解决了上述背景技术中的问题。
4.为实现以上目的,本发明通过以下技术方案予以实现:一种无人机安装防坠落绳索装置,包括无人机本体、挂钩,所述无人机本体的底部安装有底板,所述底板的底部安装有夹持结构,所述挂钩的外侧安装有锁紧结构,所述挂钩的底部安装有绳索,所述绳索的一侧设置有保险衣,所述绳索和保险衣的连接处设置有防坠落结构;所述夹持结构包括伺服电机一,所述伺服电机一的输出端设置有连接座一,所述连接座一的外侧设置有支撑架,所述支撑架的中部设置有伺服电机二,所述伺服电机二的输出端设置有连接座二,所述伺服电机二的底部设置有辅助板,所述辅助板的外侧安装有伺服电机三,所述伺服电机三的输出端设置有转轴,所述转轴的外侧设置有连接臂,所述连接臂的外侧设置有齿牙,所述连接臂的外侧设置有夹持臂。
5.作为本发明进一步的技术方案,所述转轴和连接臂之间通过螺栓形成固定连接,所述连接臂和齿牙为一体结构,所述连接臂的数量为两组并呈对称分布,两组所述连接臂外侧的齿牙之间相啮合。
6.作为本发明进一步的技术方案,所述伺服电机一、伺服电机二和伺服电机三均与外部控制模块之间为信号连接,且均与无人机本体中的供电模块之间为电性连接,所述夹持臂和辅助板的连接处设置有辅助杆,所述辅助杆的数量为两组并呈对称分布。
7.作为本发明进一步的技术方案,所述锁紧结构包括控制盒,所述控制盒的内部设置有电池一和控制电路板一,所述控制电路板一的外侧设置有盖板一,所述盖板一与外部控制模块之间为信号连接,所述挂钩的一侧设置有锁紧架,所述锁紧架和挂钩的连接处设置有活动销。
8.作为本发明进一步的技术方案,所述锁紧架和挂钩的外侧均安装有支撑板,所述
支撑板的内侧设置有电动伸缩杆一,所述电动伸缩杆一的两端与支撑板的连接处设置有活动座。
9.作为本发明进一步的技术方案,所述无人机本体的上端安装有摄像头,所述绳索为可塑结构,所述保险衣的外侧安装有若干组安全绑带。
10.作为本发明进一步的技术方案,所述防坠落结构包括连接块,所述连接块的上端开设有直径大于绳索的通孔,所述通孔贯穿连接块,所述连接块的内部开设有空腔,空腔的内部开设有十字槽。
11.作为本发明进一步的技术方案,所述连接块的底部设置有电池二和控制电路板二,所述控制电路板二的底部设置有盖板二,所述十字槽的内部设置有电动伸缩杆二,所述电动伸缩杆二的输出端固定连接有牵引圈,所述牵引圈的内圈直径大于绳索的直径。
12.作为本发明进一步的技术方案,所述连接块的内部设置有立板,所述立板的外侧安装有红外传感器,所述红外传感器和控制电路板二之间为电性连接,所述绳索的外侧刻有若干组标识线,所述连接块的一侧固定连接有连接板,所述连接板和保险衣之间为固定连接。
13.本发明提供了一种无人机安装防坠落绳索装置。与现有技术相比具备以下有益效果:1、一种无人机安装防坠落绳索装置,通过夹持结构的设置,在无人机本体与挂钩进行夹持过程中,有利于实现夹持臂的方向调节,更好的实现挂钩的夹持牵引。
14.2、一种无人机安装防坠落绳索装置,通过锁紧结构的设置,在挂钩进行悬挂完成后进行锁死,进而避免挂钩在悬挂过程中出现掉落的现象,提高挂钩的稳定性。
15.3、一种无人机安装防坠落绳索装置,通过防坠落结构的设置,在保险衣进行高速降落过程中,可将穿有保险衣的工作人员停留在绳索上端,在人员进行使用过程中,起到防坠落效果,保证人员的安全。
附图说明
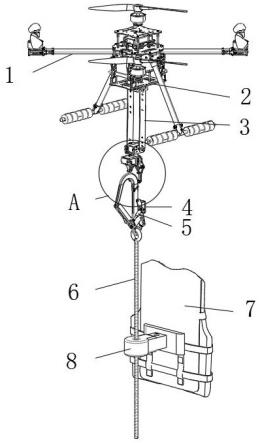
16.图1为一种无人机安装防坠落绳索装置的结构示意图;图2为一种无人机安装防坠落绳索装置的图2中a的放大图;图3为一种无人机安装防坠落绳索装置中夹持结构的局部结构示意图;图4为一种无人机安装防坠落绳索装置的图3中b的放大图;图5为一种无人机安装防坠落绳索装置中挂钩和锁紧结构的局部结构示意图;图6为一种无人机安装防坠落绳索装置的局部俯视图;图7为一种无人机安装防坠落绳索装置的图6中c的放大图;图8为一种无人机安装防坠落绳索装置中防坠落结构的局部结构示意图。
17.图中:1、无人机本体;2、底板;3、夹持结构;31、伺服电机一;32、连接座一;33、支撑架;34、伺服电机二;35、连接座二;36、辅助板;37、伺服电机三;38、转轴;39、连接臂;310、齿牙;311、夹持臂;312、辅助杆;4、挂钩;5、锁紧结构;51、控制盒;52、电池一;53、控制电路板一;54、盖板一;55、锁紧架;56、活动销;57、支撑板;58、电动伸缩杆一;59、活动座;6、绳索;7、保险衣;8、防坠落结构;81、连接块;82、通孔;83、电池二;84、控制电路板二;85、盖板二;86、十字槽;87、电动伸缩杆二;88、牵引圈;89、立板;810、红外传感器;811、标识线;812、连
接板。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参阅图1-8,本发明提供一种无人机安装防坠落绳索装置技术方案:一种无人机安装防坠落绳索装置,包括无人机本体1、挂钩4,无人机本体1的底部安装有底板2,底板2的底部安装有夹持结构3,挂钩4的外侧安装有锁紧结构5,挂钩4的底部安装有绳索6,绳索6的一侧设置有保险衣7,绳索6和保险衣7的连接处设置有防坠落结构8;其中,夹持结构3包括伺服电机一31,伺服电机一31的输出端设置有连接座一32,连接座一32的外侧设置有支撑架33,支撑架33的中部设置有伺服电机二34,伺服电机二34的输出端设置有连接座二35,伺服电机二34的底部设置有辅助板36,辅助板36的外侧安装有伺服电机三37,伺服电机三37的输出端设置有转轴38,转轴38的外侧设置有连接臂39,连接臂39的外侧设置有齿牙310,连接臂39的外侧设置有夹持臂311。
20.请参阅图1-4,转轴38和连接臂39之间通过螺栓形成固定连接,连接臂39和齿牙310为一体结构,连接臂39的数量为两组并呈对称分布,两组连接臂39外侧的齿牙310之间相啮合,伺服电机一31、伺服电机二34和伺服电机三37均与外部控制模块之间为信号连接,且均与无人机本体1中的供电模块之间为电性连接,夹持臂311和辅助板36的连接处设置有辅助杆312,辅助杆312的数量为两组并呈对称分布,从而有利于对挂钩4的夹持移动。
21.请参阅图5,锁紧结构5包括控制盒51,控制盒51的内部设置有电池一52和控制电路板一53,控制电路板一53的外侧设置有盖板一54,盖板一54与外部控制模块之间为信号连接,挂钩4的一侧设置有锁紧架55,锁紧架55和挂钩4的连接处设置有活动销56,锁紧架55和挂钩4的外侧均安装有支撑板57,支撑板57的内侧设置有电动伸缩杆一58,电动伸缩杆一58的两端与支撑板57的连接处设置有活动座59,从而有利于挂钩4的锁死,防止挂钩4在悬挂过程中出现松动。
22.请参阅图1,无人机本体1的上端安装有摄像头,绳索6为可塑结构,保险衣7的外侧安装有若干组安全绑带,进一步为保险衣7的防坠落使用做基础。
23.请参阅图6-8,防坠落结构8包括连接块81,连接块81的上端开设有直径大于绳索6的通孔82,通孔82贯穿连接块81,连接块81的内部开设有空腔,空腔的内部开设有十字槽86,连接块81的底部设置有电池二83和控制电路板二84,控制电路板二84的底部设置有盖板二85,十字槽86的内部设置有电动伸缩杆二87,电动伸缩杆二87的输出端固定连接有牵引圈88,牵引圈88的内圈直径大于绳索6的直径,连接块81的内部设置有立板89,立板89的外侧安装有红外传感器810,红外传感器810和控制电路板二84之间为电性连接,绳索6的外侧刻有若干组标识线811,连接块81的一侧固定连接有连接板812,连接板812和保险衣7之间为固定连接,从而在保险衣7使用过程中防止坠落,提高工作人员的安全性。
24.本发明的工作原理:在绳索装置使用过程中,使用者通过外部遥控器控制夹持结构3将挂钩4进行夹紧,在将锁紧结构5与挂钩4之间打开,将无人机本体1起飞到电力塔的顶
部,通过无人机本体1上端的摄像头观察电力塔安装的位置,将挂钩4通过夹持结构3悬挂在电力塔的栏杆上,在将锁紧结构5与挂钩4的开口处进行封堵,在将夹持结构3脱离挂钩4的外部,将无人机本体1降落,工作人员将保险衣7固定在身上通过电力塔的爬梯进行上升,在保险衣7出现高度滑落的现象时,通过防坠落结构8进行锁死,起到防坠落效果。
25.需要说明的,通过夹持结构3的设置,在无人机本体1与挂钩4进行夹持过程中,使用者通过外部遥控器内部的控制模块控制伺服电机三37启动,从而带动转轴38和连接臂39进行转动,其中一组连接臂39外侧的齿牙310与另一组齿牙310相啮合,从而在辅助杆312的支撑转动作用下,使得两组连接臂39带动两组夹持臂311相对夹紧,直至将挂钩4的两侧进行夹紧,同时可控制伺服电机一31和伺服电机二34启动,从而通过连接座一32和辅助板36带动支撑架33和辅助板36进行转动,进而有利于实现夹持臂311的方向调节,更好的实现挂钩4的夹持牵引。
26.需要说明的,通过锁紧结构5的设置,在挂钩4进行夹持前,通过外部遥控器与控制电路板一53之间相连接,在电池一52的供电情况下,遥控器控制电动伸缩杆一58进行收缩,使得电动伸缩杆一58的输出端通过活动座59带动锁紧架55进行移动,在活动销56的作用下,使得锁紧架55与挂钩4的内侧相贴合,在挂钩4被底板2夹紧悬挂在电力塔的顶部栏杆上时,在通过遥控器控制电动伸缩杆一58伸展,使得锁紧架55将挂钩4的开口处进行封死,进而避免挂钩4在悬挂过程中出现掉落的现象,提高挂钩4的稳定性。
27.需要说明的,通过防坠落结构8的设置,在保险衣7进行高速降落过程中,在活动座59的支撑作用下,使得红外传感器810实时监测标识线811的下降速度,当标识线811出现急速下降时,在电池二83的供电情况下,使得控制电路板二84控制电动伸缩杆二87快速收缩,同时电动伸缩杆二87的输出端带动牵引圈88将绳索6拉入十字槽86中,从而将绳索6与连接块81之间进行固定,从而使得连接板812和保险衣7停留在绳索6上端,在人员进行使用过程中,起到防坠落效果,保证人员的安全。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1