一种用于输电通道应急处置的无人机等电位夹爪系统的制作方法
1.本发明涉及无人机技术领域,具体为一种用于输电通道应急处置的无人机等电位夹爪系统。
背景技术:
2.火灾是人类生产生活中最为常见的灾害之一。随着特高压直流输电工程的火热进行,特输电线路沿线途径大片山区、丘陵、农业生产等区域,线路通道内植被茂密,特别是密集通道内存在大量的成片林草等易燃植被,山林火灾、生活用火等流动火源现象较多且分散,山火频发,火灾防控压力大,而火灾的最佳灭火时间为起始阶段。
3.在发现通道附近有生活或生产用火等流动火源时,无人机需要监测火源情况,但是常规无人机由于电池容量导致的续航时间有限,不能长时间驻留在附近监测。
4.现有技术,专利申请号为cn114944617a的发明专利,一种等电位装置及其升降平台,包括机架,所述机架靠近输电线的一侧分别设置有可上下摆动的第一等电位机构和开关机构,所述开关机构位于所述第一等电位机构的下方,且所述第一等电位机构与所述开关机构配合连接,所述第一等电位机构用于控制所述开关机构的开关状态,所述开关机构用于外部电力设备与电源之间的开关控制。现有技术中,等电位装置安装在升降平台上,承载物需要停靠在升降平台上,才能使承载物与输电线之间形成等电位,但是限制了承载物移动。
技术实现要素:
5.本发明所要解决的技术问题在于:如何消除了承载物与输电线之间的信号干扰的同时也不会限制了承载物移动的问题。
6.为解决上述技术问题,本发明提供如下技术方案:
7.一种用于输电通道应急处置的无人机等电位夹爪系统,包括无人机本体(100)以及位于所述无人机本体(100)上的等电位夹爪装置(300),所述等电位夹爪装置(300)夹取输电线,使所述无人机本体(100)与所述输电线等电位,使所述无人机本体(100)能够顺着所述输电线飞行。
8.优点:通过等电位夹爪装置能够使所述输电线与所述无人机本体等电位,避免无人机本体以及预期固定连接装置的控制系统受到影响,以及使所述无人机本体能够顺着所述输电线飞行。并为无人机本体沿着输电线边移动边充电,使无人机本即使在充电中,也能移动巡航提供了前提条件。
9.在本发明的一实施例,所述等电位夹爪装置(300)包括第一俯仰座(310)、第一俯仰驱动装置(320)和发射炮管(330);所述第一俯仰驱动装置(320)与所述第一俯仰座(310)连接,所述发射炮管(330)的一端与所述第一俯仰座(310)固定连接,通过所述第一俯仰驱动装置(320)提供动力能够使所述发射炮管(330)绕其轴线作俯仰运动。
10.在本发明的一实施例,所述等电位夹爪装置(300)还包括收线装置(340)、等电位
夹爪(3557)、第一高压储气装置(380)和导电拉绳(390);所述导电拉绳(390)位于所述发射炮管(330)内,所述收线装置(340)通过所述导电拉绳(390)与所述等电位夹爪(3557)连接,所述等电位夹爪(3557)位于所述发射炮管(330)的另一端,以一定摩檫力与所述发射炮管(330)同轴配合;所述第一高压储气装置(380)位于所述无人机本体(100)一侧的机架上,其气体输出端与所述发射炮管(330)连接,所述第一高压储气装置(380)驱动所述等电位夹爪(3557)发射夹紧所述输电线。
11.在本发明的一实施例,所述等电位夹爪(3557)包括夹爪座(350)、第二导向叉(360)、导向叉限位件(361)和导向夹爪(370);
12.所述夹爪座(350)位于所述发射炮管(330)的另一端,并与所述发射炮管(330)同轴配合;多个所述第二导向叉(360)的一端均布固定在所述夹爪座(350)上,一对所述导向叉限位件(361)固定位于对角分布的第二导向叉(360)上;所述导向夹爪(370)位于所述夹爪座(350)内并与所述夹爪座(350)转动配合。
13.在本发明的一实施例,在所述导向夹爪(370)在初始状态下,所述第二导向叉(360)通过所述导向叉限位件(361)与所述导向夹爪(370)卡合;
14.当所述输电线落入所述导向夹爪(370)内,所述导向夹爪(370)夹紧所述输电线时,所述第二导向叉(360)与所述导向夹爪(370)脱离,所述导向夹爪(370)相对所述第二导向叉(360)自由转动,自适应夹紧所述输电线,以及夹紧后,所述导向夹爪(370)与所述输电线的横截面平行。
15.在本发明的一实施例,所述导向夹爪(370)包括旋转座(371)、第一夹爪摆杆(372)、第二夹爪摆杆(373)、第一等电位夹环(374)和第二等电位夹环(375);
16.所述旋转座(371)位于所述夹爪座(350)内,并与所述夹爪座(350)转动配合;所述第一夹爪摆杆(372)和所述第二夹爪摆杆(373)的一端的分别与所述旋转座(371)铰接,使所述第一夹爪摆杆(372)和所述第二夹爪摆杆(373)能够绕铰接轴转动,并在所述铰接轴处设置有扭簧,所述第一夹爪摆杆(372)和所述第二夹爪摆杆(373)相对摆动;所述第一等电位夹环(374)与第一夹爪摆杆(372)的另一端固定连接,所述第二等电位夹环(375)与所述第二夹爪摆杆(373)的固定连接。
17.在本发明的一实施例,所述导向夹爪(370)还包括第一撑杆(376)、第二撑杆(377)和限位导向柱(378);
18.所述第一撑杆(376)的一端与所述第一夹爪摆杆(372)的另一端铰接,所述第二撑杆(377)的一端与所述第二夹爪摆杆(373)的另一端铰接,所述第一撑杆(376)另一端和所述第二撑杆(377)的另一端与所述限位导向柱(378)的一端铰接,形成三点铰接点。
19.在本发明的一实施例中,所述导向夹爪(370)在初始状态下,所述限位导向柱(378)被上拉至极限位置,所述三点铰接点向上凸出,在所述扭簧的作用下,所述第一等电位夹环(374)和所述第二夹爪摆杆(373)保持被撑开的状态;
20.将所述第一夹爪摆杆(372)和所述第一撑杆(376)的铰接点与所述第二夹爪摆杆(373)和所述第二撑杆(377)铰接点,两点之间水平距离中间的点,称为死点位置,在所述导向夹爪(370)初始状态下,所述三点铰接点位于所述死点位置之上。
21.在本发明的一实施例中,当所述导向夹爪(370)被弹射夹取所述输电线,碰撞到所述输电线后,所述输电线撞击到所述三点铰接点,使所述三点铰接点下移,位于所述死点位
置之下,则所述第一等电位夹环(374)和所述第二等电位夹环(375)瞬间闭合夹紧所述输电线;所述第二导向叉(360)与所述第一夹爪摆杆(372)和所述第二夹爪摆杆(373)脱离。
22.在本发明的一实施例中,当所述导向夹爪(370)需要释放所述输电线时,通过所述导电拉绳(390)分别拉动所述第一夹爪摆杆(372)和所述第二夹爪摆杆(373)相离,使夹紧闭合的所述第一等电位夹环(374)和所述第二等电位夹环(375)打开,使所述输电线脱离所述导向夹爪(370)。
23.与现有技术相比,本发明的有益效果是:
24.通过等电位夹爪装置,使无人机本体与输电线形成等电位,避免整个装置的控制系统受到电场干扰,实现无人机本体能够在输电线上边走边充电提供了必要的前提条件。还可以为了节省无人机本体的电量,当无人机本体充电后,可以关闭飞行系统,无人机本体被悬挂在输电线上,通过夹紧及行走装置驱动使其沿输电线行走,则固定在无人机本体上的一些监测设备,还能继续工作。
25.通过导线导向叉用以收拢输电线,通过取电装置为无人机本体在线充电,仅通过一个电动推杆可实现取电固定座和旋转取电座旋转贴合和旋转分离,通过压紧锁钩在紧楔块上滑动,可保持较大的压紧力,使ct取电装置可靠贴合,一提高充电效率。仅需一个电动推杆就可以分步先后实现旋转和夹紧的先后动作,夹紧时是先旋转再锁紧,打开时是先解锁再旋转。
附图说明
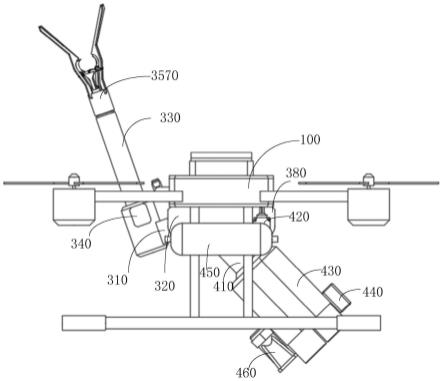
26.图1为本发明的一种用于输电通道应急处置的无人机等电位夹爪系统示意图。
27.图2为本发明不同俯仰位置的等电位夹爪装置示意图。
28.图3为本发明的等电位夹爪示意图。
29.图4为本发明的等电位夹爪夹取输电线示意图。
30.图5为本发明另一个角度下等电位夹爪夹紧输电线示意图。
31.图6为本发明的导向夹爪示意图。
32.图7为本发明一种状态下的导向夹爪示意图。
33.图8为本发明另一种状态下的导向夹爪示意图。
34.图9为本发明再一种状态下的导向夹爪示意图。
35.图10为本发明另一个实施例的一种用于输电通道应急处置的无人机等电位夹爪系统示意图。
36.图11为本发明的行走取电装置示意图。
37.图12为本发明的夹紧及行走装置示意图。
38.图13为本发明初始状态下的夹紧及行走装置示意图。
39.图14为本发明夹紧的夹紧及行走装置示意图。
40.图15为本发明的取电装置示意图。
41.图16为本发明另一个角度下的取电装置示意图。
42.图17为本发明初始状态下的取电装置示意图。
43.图18为本发明无人机本体飞行至不会被输电线的高压电场影响区域的示意图。
44.图19为本发明等电位夹爪装置被发射夹取输电线示意图。
45.图20为本发明无人机本体沿着输电线飞行示意图。
具体实施方式
46.为便于本领域技术人员理解本发明技术方案,现结合说明书附图对本发明技术方案做进一步的说明。
47.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
48.输电线附近有高压电场,为避免高压电场对无人机本体的控制系统产生影响,在无人机本体还未进入高压电场的影响区域时,即距离输电线还有一段距离时,需要保护无人机本体的控制系统,避免受影响。
49.实施例一
50.请参阅图1所示,一种用于输电通道应急处置的无人机等电位夹爪系统,包括无人机本体100以及位于无人机本体100上的等电位夹爪装置300,等电位夹爪装置300夹取输电线,使无人机本体100与所述输电线等电位,使无人机本体100够顺着所述输电线飞行。
51.请参阅图1所示,在本发明的一实施例中,等电位夹爪装置300包括第一俯仰座310、第一俯仰驱动装置320、发射炮管330、收线装置340、等电位夹爪3557、第一高压储气装置380和导电拉绳390。第一俯仰座310固定位于无人机本体100腹部的一端,第一俯仰驱动装置320与第一俯仰座310连接,发射炮管330的一端与第一俯仰座310固定连接,通过第一俯仰驱动装置320提供动力能够使发射炮管330绕其轴线作俯仰运动。等电位夹爪3557位于发射炮管330的另一端,以一定摩檫力与发射炮管330同轴配合。第一高压储气装置380位于无人机本体100一侧的机架上,其气体输出端与发射炮管330连接,通过第一高压储气装置380的提供高压驱动力,使等电位夹爪3557能够从发射炮管330上被弹射出去。导电拉绳390位于发射炮管330内,收线装置340与发射炮管330固定连接,导电拉绳390的两端分别与收线装置340和等电位夹爪3557固定连接,通过收线装置340和导电拉绳390,能够回收被弹飞的等电位夹爪3557。
52.请参阅图1和图2所示,在本发明的一实施例中,通过第一俯仰驱动装置320提供动力,能够使发射炮管330绕第一俯仰座310作
±
90
°
的俯仰运动。
53.请参阅图1和图3所示,在本发明的一实施例中,等电位夹爪3557包括夹爪座350、第二导向叉360、导向叉限位件361和导向夹爪370。多个第二导向叉360的一端均布固定在夹爪座350上,一对导向叉限位件361固定位于对角分布的第二导向叉360上。导向夹爪370位于夹爪座350内并与夹爪座350转动配合。在导向夹爪370在初始状态下,第二导向叉360通过导向叉限位件361与导向夹爪370卡合,当输电线a落入导向夹爪370内,导向夹爪370夹紧输电线a时,第二导向叉360与导向夹爪370脱离,导向夹爪370相对第二导向叉360自由转动,可适应夹紧输电线a,夹紧后,导向夹爪370与输电线a的横截面平行,见图4和图5所示。
54.请参阅图4和图5所示,在本发明的一实施例中,第二导向叉360的数量例如为4个,避免2个第二导向叉360在的飞行的过程中出现转体,而引起的无法触碰收拢输电线a的情况,当转到与输电线a平行时,2个第二导向叉360就无法触碰收拢到输电线a。
55.请参阅图6和图7所示,在本发明的一实施例中,导向夹爪370包括旋转座371、第一夹爪摆杆372、第二夹爪摆杆373、第一等电位夹环374、第二等电位夹环375、第一撑杆376、第二撑杆377、限位导向柱378和拉线导管379。旋转座371位于夹爪座350内,与夹爪座350转动配合,第一夹爪摆杆372和第二夹爪摆杆373一端分别旋转座371铰接,使第一夹爪摆杆372和第二夹爪摆杆373能够绕铰接轴转动,并在所述铰接轴处设置有的扭簧,第一夹爪摆杆372和第二夹爪摆杆373相对摆动。第一等电位夹环374的一端与第一夹爪摆杆372的另一端固定连接,第二等电位夹环375的一端与第二夹爪摆杆373的另一端固定连接。第一撑杆376的一端与第一夹爪摆杆372的另一端铰接,第二撑杆377一端与第二夹爪摆杆373的另一端铰接,第一撑杆376另一端和第二撑杆377的另一端与限位导向柱378的一端铰接,形成三点铰接点b,且限位导向柱378与旋转座371同轴滑配。一对拉线导管379分别与第一夹爪摆杆372和第二夹爪摆杆373并排固定在旋转座371上,一对拉线导管379呈v字固定在旋转座371上。一对拉线导管379内分别设置有导电拉绳390,一对导电拉绳390的一端分别与第一夹爪摆杆372和第二夹爪摆杆373固定连接,一对拉伸390的另一端与收线装置固定连接。第二导向叉通过导向叉限位件依次与拉线导管和第一夹爪摆杆372卡合,或与第二夹爪摆杆373卡合。导向夹爪370还包括输电线限位板3791,一对输电线限位板3791与第一等电位夹环374和第二等电位夹环375的平面平行,并前后设置与旋转座371固定连接。其中,第一等电位夹环374和第二等电位夹环375能够导电。第一夹爪摆杆372和第一等电位夹环374例如一体成型,第一夹爪摆杆372也能够导电。第二等电位夹环375和第二夹爪摆杆373例如也一体成型,第二夹爪摆杆373也能够导电。
56.请参阅图6至图9所示,在本发明的一实施例中,导向夹爪370在初始状态下,限位导向柱378被上拉至极限位置,三点铰接点b向上凸出,在扭簧的作用下,第一等电位夹环374和第二等电位夹环375保持被撑开的状态。将第一夹爪摆杆372和第一撑杆376的铰接点与第二夹爪摆杆373和第二撑杆377的铰接点,两点之间水平距离中间的点,称为死点位置c,在,导向夹爪370初始状态下,三点铰接点b位于死点位置c之上。当导向夹爪370被弹射出,碰撞到输电线a后,输电线a撞击到三点铰接点b,使三点铰接点b线下移动,位于死点位置c之下,此时第一等电位夹环374和第二等电位夹环375在扭簧的作用下,瞬间夹紧输电线a。此时,第二导向叉360与第一夹爪摆杆372和第二夹爪摆杆373脱离,第一等电位夹环374和第二等电位夹环375相对第二导向叉360自由转动,自适应夹紧输电线a,夹紧后第一等电位夹环374和第二等电位夹环375与输电线a的横截面平行。当无人机本体充电结束后,收线装置340拉拽导电拉绳390,通过导电拉绳390分别拉动第一夹爪摆杆372和第二夹爪摆杆373相离,使夹紧闭合的第一等电位夹环374和第二等电位夹环375打开,输电线a脱离导向夹爪370。
57.实施例二
58.请参阅10所示,在本发明的另一实施例中,所述用于输电通道无人机等电位夹爪装置还包括行走取电装置200和灭火装置400,行走取电装置200位于所述无人机本体100的背部,等电位夹爪装置300位于所述无人机本体100腹部的一侧,灭火装置400位于无人机本体100腹部的另一侧。当无人机本体100需要充电时,等电位夹爪装置300被弹射夹取输电线,所述行走取电装置200悬挂在输电线上,使所述无人机本体100能够沿着所述输电线边移动边充电。
59.请参阅图11所示,在本发明的一实施例中,行走取电装置200包括底座210和位于底座210上的取电装置2450,以及以取电装置2450为中心,呈对称设置的导线导向叉220和夹紧及行走装置230,且导线导向叉220、夹紧及行走装置230和取电装置2450的工作轴线同轴。导线导向叉220收拢输电线,夹紧及行走装置230夹紧所述输电线,并能够沿着所述输电线行走,所述输电线位于所述取电装置2450内,为所述无人机本体100在线充电。
60.请参阅图11所示,在本发明的一实施例中,导线导向叉220包括u形座221、第一导向叉222和检测装置223。其中,u形座221与底座210的一侧固定连接。第一导向叉222包括u形件2221和收拢杆2222,u形件2221贴合u形座221并与之固定连接,一对收拢杆2222一端分别与u形件2221固定连接,使第一导向叉222形成一个向上的开口,且所述开口上大下小,以收拢输电线。一对检测装置223分别固定位于u形件2221上,用以检测输电线是否落入u形件2221内。
61.请参阅图12至图14所示,在本发明的一实施例中,夹紧及行走装置230包括滑动底座231、双向丝杆装置232、滑动块233、滚轮座234、包胶防滑滚轮235和驱动装置236。滑动底座231与底座固定连接,双向丝杆装置232位于滑动底座231上,双向丝杆装置232与滑动块233连接,带动滑动块233相向或背向滑动。滚轮座234位于滑动块233上并与之固定连接。包胶防滑滚轮235位于滚轮座234一侧,并嵌套在滚轮座234内,能够在滚轮座234内转动。驱动装置236位于滚轮座234的另一侧,在滚轮座234内驱动装置236驱动包胶防滑滚轮235在滚轮座234上转动。
62.请参阅图12至图14所示,在本发明的一实施例中,滑动块233包括第一滑动块2331和第二滑动块2332,滚轮座234包括驱动滚轮座2341和从动滚轮座2342,驱动滚轮座2341与第一滑动块2331固定连接,从动滚轮座2342与第二滑动块2332固定连接。具体的,双向丝杆装置232的丝杆从中间分为两半,一半丝杆的螺纹右旋,一半丝杆的螺纹左旋,且右旋螺纹的丝杆与右旋螺母配合,左旋螺纹的丝杆与左旋螺母配合,第一滑动块2331和第二滑动块2332分别与右旋螺母和左旋螺母固定连接,当双向丝杆装置232转动时,右旋螺母和左旋螺母在丝杆上相向或背向滑动,间接带动第一滑动块2331和第二滑动块2332相向或背向滑动,以及间接带动驱动滚轮座2341和从动滚轮座2342相向或背向滑动。滚轮座234呈矩形箱体,并在其一侧内凹,形成一个容纳空间2340,包胶防滑滚轮235位于容纳空间2340内,且包胶防滑滚轮235部分突出滚轮座234。驱动滚轮座2341和从动滚轮座2341上的容纳空间2340相对设置,对应的,每个滚轮座上都设置有包胶防滑滚轮235,包胶防滑滚轮235在外力的驱动下,能够在容纳空间2340内转动。包胶防滑滚轮235包括主动包胶防滑滚轮2351和从动包胶防滑滚轮2352,具体的,主动包胶防滑滚轮2351位于驱动滚轮座2341的容纳空间2340内,从动包胶防滑滚轮2352位于从动滚轮座2341的容纳空间2340内。两个包胶防滑滚轮都呈中部内凹并平滑过渡至两端的圆柱体,以贴合输电线a,见图5所示。驱动装置236与驱动滚轮座2341固定连接,其驱动装置236的输出端驱动主动包胶防滑滚轮2351转动。具体的,驱动装置236例如为一个电机。
63.请参阅图12至图14所示,在本发明的一实施例中,初始状态下,驱动滚轮座2341和从动滚轮座2341之间是相离的,形成夹持区域。需要充电时,当输电线a进入所述夹持区域内后,双向丝杆装置232带动第一滑动块2331和第二滑动块2332相向滑动,间接带动驱动滚轮座2341和从动滚轮座2342相向滑动,最终使主动包胶防滑滚轮2351和从动包胶防滑滚轮
2352贴合并夹紧输电线a,驱动装置236驱动主动包胶防滑滚轮2351转动,使主动包胶防滑滚轮2351和从动包胶防滑滚轮2352产生能够沿着输电线a轴向的力,即使夹紧及行走装置230能够沿着输电线a行走。充电结束,双向丝杆装置232带动第一滑动块2331和第二滑动块2332背向滑动,间接带动驱动滚轮座2341和从动滚轮座2342背向滑动,最终使主动包胶防滑滚轮2351和从动包胶防滑滚轮2352松开输电线a,输电线a脱离夹持区域。
64.请参阅图15和图16所示,在本发明的一实施例中,取电装置2450包括取电固定座241、旋转取电座242、ct取电装置2434、从动推拉装置2457、齿轮251、齿条252和驱动推拉装置253。取电固定座241与底座210固定连接,见图2所示,旋转取电座242位于取电固定座241之上,与取电固定座241旋转配合,ct取电装置2434位于取电固定座241和旋转取电座242内。从动推拉装置2457位于取电固定座241的一侧,齿条252与从动推拉装置2457固定连接,齿轮251与旋转取电座242的旋转轴线同轴。驱动推拉装置253固定位于取电固定座241底部,通过驱动推拉装置253驱动从动推拉装置2457作推拉运动,使齿轮251和齿条252啮合,使旋转取电座242与取电固定座241旋转贴合或旋转分离,且驱动推拉装置253驱动从动推拉装置2457还将旋转贴合的旋转取电座242和取电固定座241锁紧或解除锁紧状态。
65.请参阅图15和图16所示,在本发明的一实施例中,取电固定座241内凹,呈逆时针旋转90
°
且开口朝上的c形设置,形成下ct槽。旋转取电座242外凸,呈倒置的且开口向下的c形设置,形成上ct槽。当取电固定座241和旋转取电座242旋转分离时,便于输电线落入ct槽内。取电装置2450还包括压紧楔块2421,位于旋转取电座242上相对齿轮251的一端,压紧楔块2421呈三角块状设置。ct取电装置2434包括上半ct取电装置243和下半ct取电装置244,上半ct取电装置243贴合固定位于旋转取电座242内,下半ct取电装置244贴合固定位于取电固定座241内,当旋转取电座242和取电固定座241旋转贴合时,上半ct取电装置243和下半ct取电装置244贴合,组成完整的ct取电装置2434。ct取电装置2434还与无人机本体的充电装置通信连接,用于给无人机本体充电。
66.请参阅图15和图16所示,在本发明的一实施例中,从动推拉装置2457包括限位件245、推拉控制板246和压紧锁钩247,在推拉控制板246上设置有腰孔2461,限位件245一端与取电固定座241固定连接,另一端位于腰孔2461内,与推拉控制板246滑动配合,推拉控制板246相对取电固定座241做推拉运动。齿条252固定位于推拉控制板246的一端,便于与齿轮251啮合,压紧锁钩247固定位于推拉控制板246的另一端,当推拉控制板246做推拉运动运动时,压紧锁钩247能够在压紧楔块2421的斜面上滑动。具体的,一对从动推拉装置2457分别位于取电固定座241的两侧,其取电固定座241的两侧都设置有齿轮251和齿条152。驱动推拉装置253包括固定座2531、连接板2532和电动推杆2533,电动推杆2533的一端通过固定座2531与取电固定座241的底部固定连接。连接板2532呈内凹设置,两端分别与位于取电固定座241两侧的推拉控制板246固定连接,取电固定座241的底部位于连接板2532的内凹处,电动推杆2533的伸出端与连接板2532的底部固定连接,为推拉控制板246的作推拉运动,提供动力。取电装置2450还包括支撑座2411,支撑座2411的两端分别与底座和取电固定座241固定连接,为驱动推拉装置253提供空间。
67.请参阅图15至图17所示,在本发明的一实施例中,取电装置2450在初始状态下,取电固定座241和旋转取电座242为旋转分离状态,电动推杆2533为缩回状态,齿轮251和齿条252啮合。当输电线落入所述下ct槽内时,电动推杆2533推动推拉控制板246向右移动,带动
齿轮251和齿条252啮合,使旋转取电座242逆时针转动,直至旋转取电座242和取电固定座241贴合。当旋转取电座242和取电固定座241贴合时,齿轮251和齿条252刚好脱离啮合,此时,电动推杆2533继续推动推拉控制板246向右移动,带动压紧锁钩247与压紧楔块2421接触,压紧锁钩247沿压紧楔块2421的斜面滑动,楔紧力将旋转取电座242和取电固定座241压紧锁住,同时保持较大的压紧力,即将输电线锁紧在取电装置2450内。使取电装置2450悬挂在输电线上,通过输电线和ct取电装置2434为无人机本体充电。
68.请参阅图15至图17所示,在本发明的一实施例中,当充电结束后,电动推杆2533回缩,带动推拉控制板246向左移动,使压紧锁钩247与压紧楔块2421分离,解除旋转取电座242和取电固定座241的锁紧状态,电动推杆2533继续带动推拉控制板246向左移动,齿轮251和齿条252开始啮合,并使旋转取电座242顺时针旋转,直至与取电固定座241完全分离,使输电线脱离ct取电装置2434。
69.请参阅图11所示,在本发明的一实施例中,行走取电装置200还包括旋转装置260,旋转装置260的一端与底座210固定连接,另一端与无人机本体的背部连接,可使无人机本体相对于位于其背部上的带动底座210、导线导向叉220、夹紧及行走装置230转动。用于当无人机本体悬挂在输电线上,可使无人机本体与位于在背部上的装置旋转。
70.请参阅图11至图17所示,在本发明的一实施例中,通过第一导向叉222收拢输电线a,当检测装置223检测输电线a落入u形件2221后,同时双向丝杆装置232带动第一滑动块2331和第二滑动块2332相向滑动,间接带动驱动滚轮座2341和从动滚轮座2342相向滑动,最终使主动包胶防滑滚轮2351和从动包胶防滑滚轮2352贴合并夹紧输电线a。以及同时电动推杆2533推动推拉控制板246向右移动,带动齿轮251和齿条252啮合,使旋转取电座242逆时针转动,直至旋转取电座242和取电固定座241贴合。当旋转取电座242和取电固定座241贴合时,齿轮251和齿条252刚好脱离啮合,此时,电动推杆2533继续推动推拉控制板246向右移动,带动压紧锁钩247与压紧楔块2421接触,压紧锁钩247沿压紧楔块2421的斜面滑动,楔紧力将旋转取电座242和取电固定座241压紧锁住。在充电期间,为节省无人机本体100的电量,可以关闭飞行系统,悬挂在输电线a上若无人机本体100还需要移动时,驱动装置236驱动主动包胶防滑滚轮2351转动,使主动包胶防滑滚轮2351和从动包胶防滑滚轮2352产生能够沿着输电线a轴向的力,即使夹紧及行走装置230能够沿着输电线a行走,则固定的无人机本体100的一些监测设备,还能继续工作。
71.请参阅图11至图17所示,在本发明的一实施例中,当充电结束后,电动推杆2533回缩,带动推拉控制板246向左移动,使压紧锁钩247与压紧楔块2421分离,解除旋转取电座242和取电固定座241的锁紧状态,电动推杆2533继续带动推拉控制板246向左移动,齿轮251和齿条252开始啮合,并使旋转取电座242顺时针旋转,直至与取电固定座241完全分离,使输电线脱离ct取电装置2434,同时双向丝杆装置232带动第一滑动块2331和第二滑动块2332背向滑动,间接带动驱动滚轮座2341和从动滚轮座2342背向滑动,使输电线a脱离夹持区域,以及脱离导线导向叉220。
72.请参阅图10所示,在本发明的一实施例中,所述用于输电通道应急处置的无人机等电位夹爪系统还包括输电线定位装置2300,输电线定位装置2300位于所述无人机本体100的侧边,用于定位输电线。
73.请参阅图1和图10所示,在本发明的一实施例中,灭火装置400包括第二俯仰座位
410、第二俯仰驱动装置420、灭火炮管430、火情识别装置440、第二高压储气装置450和喇叭460。第二俯仰座位410位于无人机本体100腹部的另一端,第二俯仰驱动装置420与第二俯仰座位410连接,灭火炮管430与第二俯仰座位410固定连接,通过第二俯仰驱动装置420驱动第二俯仰座位410和灭火炮管430俯仰转动。具体的,能够俯仰转动0~-90
°
。第二高压储气装置450的输气端与灭火炮管430连接,为灭火炮管430提供高压气体动力。火情识别装置440固定在灭火炮管430的一侧面,用于火情识别、定位火情位置和监控火情情况。喇叭460固定在灭火炮管430的另一侧面,用于喊话警示。
74.请参阅图1至图17所示,在本发明的一实施例中,所述用于输电通道应急处置的无人机等电位夹爪系统例如还包括远程总控制器(图中未显示),与无人机本体100、行走取电装置200、等电位夹爪装置300、灭火装置400和输电线定位装置2300通信连接,当工作人员通过火情识别装置440发现火情时,通过喇叭460通知附近居民,通过调整灭火炮管430的俯仰位置,并驱动灭火。当无人机本体100没有电量时,通过输电线定位装置2300识别输电线a的位置,驱动等电位夹爪装置300发送等电位夹爪3557,使无人机本体100与输电线等点位,控制行走取电装置200为无人机本体100充电。当无人机本体100在充电中,发现火情时,也能实现行走取电装置200沿着高压输电移动,调整灭火装置400的位置,发射灭火炮管430灭火。
75.请参阅图18至图20所示,在本发明的一实施例中,当灭火装置400监测到火情时,即火情识别装置440监测到火情,无人机本体100确电量不足,确保无人机本体100在线充电的同时,还能移动到火灾附近,驱动灭火装置400灭火。
76.请参阅图18至图20所示,在本发明一实施例中,输电线定位装置2300定位输电线a的位置,无人机本体100向输电线a的位置飞去,飞到不会被输电线a的高压电场影响区域的附近,停止继续靠近。
77.请参阅图18至图20所示,在本发明一实施例中,等电位夹爪装置300夹紧输电线a后,无人机本体100开始向靠近输电线a的方向飞行,将输电线a落入行走取电装置200内,行走取电装置200夹紧输电线a,在此过程中,等电位夹爪装置300上的收线装置同步工作,使导电拉绳产生一定的张紧力,避免缠绕现象发生。当完成灭火后,充电完成后,行走取电装置200松开输电线a,通过收线装置放松导电拉绳,同时向远离输电线a的方向飞行,到达安全区域后,通过收线装置再次拉紧导电拉绳,使导向夹爪打开释放输电线a,最后再通过收线装置回收导向夹爪。
78.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1