一种尾座式三涵道垂直起降飞行器及其控制方法
本发明涉及飞行器,尤其是涉及一种尾座式三涵道垂直起降飞行器及其控制方法。
背景技术:
1、近年来,随着无人机在各领域的广泛应用,其使用环境和作业任务日益复杂。起降方案的便捷性和安全性是决定无人机在海面、山区等恶劣环境下的连续作业能力的重要因素。因此,垂直起降的功能特征对无人机的应用拓展具有重要意义。多旋翼无人机和固定翼无人机分别在垂直起降和高速巡航方面各有优势,而如何将这两大优势特征充分结合,将是解决无人机在受限环境中大规模应用的关键问题。
2、垂直起降飞行器分为倾转旋翼式、复合式和尾座式三大类,如公开号为cn108482668a的中国专利文献公开了一种倾转式垂直起降飞行器,公开号为cn105923154a的中国专利文献公开了一种纵列式双旋翼固定翼复合式垂直起降飞行器。倾转式垂直起降飞行器在倾转过程中控制复杂,技术难度大、风险高;复合式垂直起降飞行器包含垂直起降和平飞推进两套动力系统,使得其有效载荷低、外露桨叶引起的固定翼飞行阻力大;而尾座式垂直起降飞行器则介于两者之间,既保证垂直起降飞行器具备较好的载荷能力,又降低了控制复杂度,是目前垂直起降飞行器重点发展的外形布局及控制形式。
3、在现有研究中,aerovel公司的弹性旋翼尾座式无人机、美国诺格公司提出的tern“燕鸥”尾座式无人机、国内成飞展出的vd-200尾座式无人机等机型,均采用开放式螺旋桨以及一体化或较长翼展的机翼结构,可以达到较好的平飞飞行性能,但对于过渡态稳定性以及垂直起降飞行阻力等问题没有做较多考虑,且由于其动力系统外露,造成飞行器整体效率与安全性降低。
4、因此,提供一款既能垂直起降,又能高速巡航且具有更高的效率和安全性的飞行器是本领域技术人员亟需解决的问题。
技术实现思路
1、为了克服现有技术的不足,本发明提供了一种尾座式三涵道垂直起降飞行器,其既能垂直起降又能以固定翼模式巡航,可在环境受限的场景下高效执行任务,其独特的设计使得整体效率和安全性大大提高。
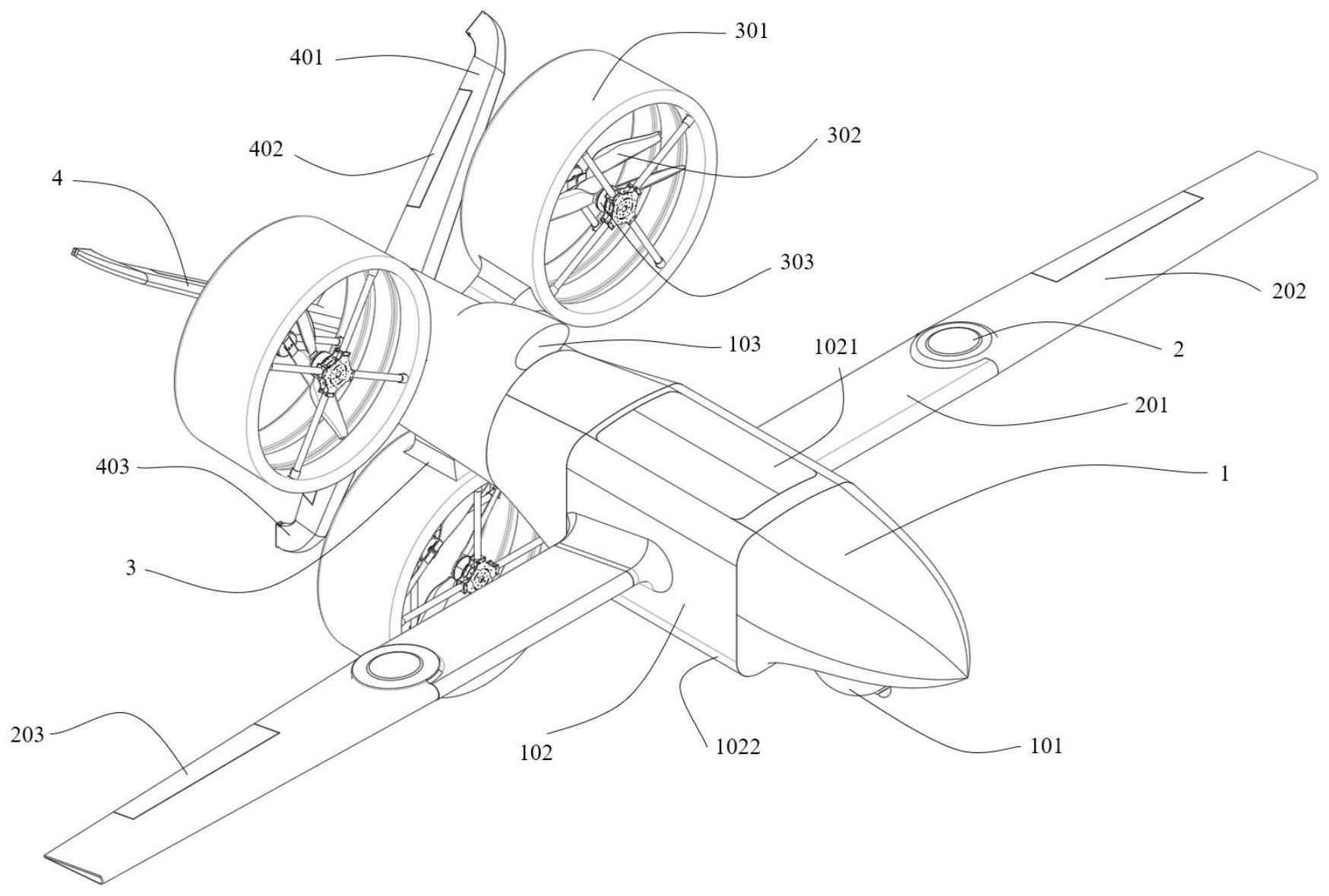
2、一种尾座式三涵道垂直起降飞行器,包括飞行器机身,所述飞行器机身的前段为机载设备舱、中段为载荷舱、后段为动力舱;
3、所述载荷舱的两侧对称设有一对可折叠机翼部件,每个可折叠机翼部件包括与载荷舱外壁固定的第一平直翼、与第一平直翼可折叠固定的第二平直翼以及设置在第二平直翼上的副翼;
4、所述动力舱的外壁沿周向均匀固定有三个动力部件,每个动力部件包括与动力舱外壁固定的涵道、固定在涵道内的电机以及与电机输出端连接的螺旋桨;
5、所述动力舱的尾端均匀固定有多个尾翼部件,每个尾翼部件包括与动力舱的尾端固定的尾翼、设置在尾翼上的尾翼舵以及设置在尾翼末端的起落架;
6、所述的机载设备舱内设有控制可折叠机翼部件、动力部件和尾翼部件的飞行控制器和其他必要的机载设备,用于对飞行器的飞行过程进行控制。
7、本发明所提供的尾座式三涵道垂直起降飞行器,其既能垂直起降又能以固定翼模式巡航,且整体效率和安全性大大提高,解决了现有垂直起降飞行器的控制系统复杂、飞行阻力大且载荷能力弱的技术问题。
8、优选地,所述载荷舱上设有背部舱门和腹部舱门。腹部舱门可以用于军用物资投放,背部舱门可以用于物流运输。
9、所述的动力舱主要用于放置大容量锂电池、发电机、燃油等。燃油提供给发电机进行发电,通过发动机持续发电给锂电池充电,锂电池用于给电机供电。
10、进一步地,所述的第一平直翼与第二平直翼的翼型均为naca6412,两者通过铰链连接;第二平直翼在飞行器垂直飞行时为折叠状态,水平飞行时为展开状态;其中,第二平直翼的最大折叠角度120度。
11、进一步地,所述第一平直翼与第二平直翼的表面覆盖有太阳能光伏薄膜,太阳能光伏薄膜的电能输出与动力舱内设置的锂电池连接。机翼覆盖太阳能光伏薄膜使其具备超长续航力、静音飞行和低排放等优异性能。
12、进一步地,三个动力部件中,其中一个固定在动力舱的正下方,另外两个对称固定在动力舱的上方,三个动力部件之间固定的角度间隔120°,动力部件总计提供的最大可用拉力不小于无人机的起飞重量。
13、进一步地,所述的涵道内部沿轴向设有两个正对的电机,每个电机连接有一个对应的螺旋桨,该螺旋桨为符合拉力需求的两叶桨,型号为2788,安装方式为共轴反转。
14、进一步地,所述的涵道内壁设有用于抑制螺旋桨桨尖涡的环形切槽,切槽的深度与桨叶没入部分的长度比为2:1,涵道外壁设有用于增升的流线型翼型结构。
15、所述的飞行器机身设计为横截面呈左右对称的流线型,尾翼部件和动力部件轴向重合,以最大程度提高舵面操纵效果。副翼、尾翼舵可在舵机和传动机构的带动下发生偏转。
16、本发明还提供了一种尾座式三涵道垂直起降飞行器的控制方法,飞行器的任务执行过程分为:地面准备、垂直起飞、垂转平模态切换、任务巡航、平转垂模态切换、垂直降落和地面回收七个阶段,每个阶段的控制方法如下:
17、地面准备:飞行器通过模块化装配实现快速部署,待飞行器完成部署后进行有关系统测试并进入待飞状态,此时机身应与地面保持垂直状态,可折叠机翼部件处于折叠状态;
18、垂直起飞:启动电机并保持怠速,确认工作正常后调节各动力部件的电机转速,待推力大于重力后,飞行器脱离地面,开始加速上升;在飞行速度达到指定的模态切换速度之前,可折叠机翼部件始终保持折叠状态,飞行器的位置和姿态通过调节各动力部件的电机转速来调控;当飞行器进入目标高度区间且飞行速度大于指定的模态切换速度之后,可折叠机翼部件展开,飞行器进入模态切换阶段;
19、垂转平模态切换:通过调节各动力部件的电机转速和尾翼舵面使机体产生俯仰力矩,将俯仰角从垂直上升过程中的90°调整至巡航状态下的配平值,在此过程中,飞行器的飞行高度逐渐稳定,直至最终建立巡航飞行状态;
20、任务巡航:各动力部件在此阶段的推力大小始终保持相等,飞行器的姿态调控仅由各舵面操控量决定,具体控制方式为通过尾翼舵面实现飞行器的偏航和俯仰运动,通过副翼控制飞行器的滚转运动;
21、平转垂模态切换:通过调节各动力部件的电机转速和尾翼舵面使机体产生俯仰力矩,将俯仰角从巡航状态下的配平值调整至垂直降落的90°,在此过程中,飞行器的飞行高度逐渐存在上升,直至最终建立悬停的飞行状态;
22、垂直降落:完成平转垂模态切换后,将飞行器的可折叠机翼部件进行折叠,通过调节各动力部件的电机转速来调控飞行器的位置和姿态,使飞行器的高度逐渐下降;
23、地面回收:飞行器完成任务降落至地面时,进行有关维护和拆卸转运。
24、与现有技术相比,本发明具有以下有益效果:
25、1、本发明采用尾座式垂直起飞降落方式进行起落,平飞阶段采用固定翼模式进行巡航飞行。其垂起动力与平飞动力合二为一,整体效率更高;由于该飞行器采用的是涵道装置,其螺旋桨安装在涵道内,更加安全且噪音低;并且由于涵道可减小叶尖的诱导阻力,对比没有涵道结构相同桨盘直径的螺旋桨具有更高推力和效率,因此可以适当缩小螺旋桨尺寸且提供足够的动力。
26、2、本发明设计的可折叠机翼可以使飞行器在起降过程中的迎风面积减小,提高了工作过程中的抗干扰能力与飞行稳定性。
27、3、本发明采用增程式油电混合推进系统。螺旋桨由电机驱动,通过发动机持续发电补充电能增加续航。
- 还没有人留言评论。精彩留言会获得点赞!