一种新型跨域航行器
1.本发明涉及的是一种航行器,具体地说是水空两域航行器。
背景技术:
2.水空两域跨介质航行器是一种同时拥有水中航行与空中飞行能力的新概念航行器,弥补水下航行器和无人驾驶飞机只能在水下或空中领域运行的不足。能够在空中飞行、在水中航行并可以多次跨越水、空两种介质的跨域航行器有着广阔的应用背景。跨域航行器可以快速飞到目标空域采集航拍数据,随后潜入水中采集水下数据,暨大提高工作效率。跨域航行器不仅可用来对水下结构进行检查,而且在跨介质操作、海洋生物调查、水空观测有强大的应用前景。
3.当前的跨域航行器可分为三类:固定翼航行器、旋翼航行器、仿生航行器。固定翼航行器在空中具有优秀的飞行性能,但是在水下航行时,其提供升力的机翼严重阻碍水下航行。在固定翼的基础上提出的折叠翼方案在水下能显著降低阻力,但其部分技术在水下实行难度过大。旋翼航行器可以通过控制多个旋翼,实现垂直升降、悬停等功能,其灵活性与控制性较高,但效率低、续航时间短。仿生航行器从自然界的生物汲取灵感,将自然界生物特性应用于航行器上,但是许多设计方法都是提取的经验公式,忽视了材料的影响,需要进一步的研究与优化。
技术实现要素:
4.本发明的目的在于提供可以满足水空两域不同的工况条件下航行需求的一种新型跨域航行器。
5.本发明的目的是这样实现的:
6.本发明一种新型跨域航行器,其特征是:包括航行器艇体,航行器艇体的中部设置跨域两用装置,所述跨域两用装置包括径向转轴,径向转轴安装在航行器艇体上,径向转轴的两端分别安装第一倾转机构和第二倾转机构,第一倾转机构连接第一可伸缩变体机翼,第二倾转机构连接第二可伸缩变体机翼,所述第一可伸缩变体机翼由内至外包括内翼、收容舱、外翼,内翼连接收容舱,外翼位于收容舱外侧或缩至收容舱内,第二可伸缩变体机翼与第一可伸缩变体机翼结构相同、对称布置,航行器艇体前部的下方设置压载水舱。
7.本发明还可以包括:
8.1、航行器艇体中部设置大功率推进装置,大功率推进装置连接跨域两用装置,航行器艇体前部设置小功率推进装置,航行器艇首设置螺旋桨,小功率推进装置连接螺旋桨。
9.2、航行器艇体的尾部分别设置方向舵和升降舵。
10.3、外翼上设置副翼舵。
11.4、水面起飞时,可伸缩变体机翼全部伸展,压载水舱充盈空气,航行器艇体艇首向上抬起,通过调节螺旋桨转速,控制副翼舵、方向舵、升降舵实现航行器水面起飞动作。
12.5、空中飞行时,可伸缩变体机翼全部伸展,航行器艇体艇首的螺旋桨产生向前的
拉力,可伸缩变体机翼产生升力,通过控制副翼舵、方向舵、升降舵对航行器艇体的姿态进行控制。
13.6、降落潜水时,航行器艇体艇首的螺旋桨降低转速,航行器艇体滑落水面过程,首先由压载水舱与水面进行接触,破开水面后逐步入水,航行器艇体的其他部分仍处于空中,进入水面降落滑行状态,螺旋桨逐步降低转速直至停止,待航行器艇体平稳降落在水面,压载水舱进水口打开,使得跨域航行器本体潜入水中。
14.7、水下潜航时,可伸缩变体机翼的外翼全部收缩至內翼舱,收缩完毕后可伸缩变体机翼开始变体向螺旋桨外形趋近,跨域两用装置的径向转轴带动可伸缩变体机翼绕航行器艇体转动,通过控制方向舵实现偏航运动,控制升降舵实现俯仰运动。
15.8、喷射出水时,控制升降舵、方向舵将跨域航行器本体运动至水面附近,并调整姿态使航行器艇体头部朝向水面,可伸缩变体机翼的外翼伸出至收容舱外部,待姿态稳定后,高压空气释放将压缩水舱的压载水挤压喷射,航行器艇体艇首的螺旋桨加速转动,使跨域航行器本体达成喷射出水。
16.本发明的优势在于:
17.1.本发明提供的跨域航行器,可以满足水空两域不同的工况条件下的航行需求,基于环流理论设计了跨域两用装置,在空中跨域两用装置中的可伸缩机翼伸展开,为航行器提供升力;在水下跨域两用装置中的可伸缩机翼收缩,提高了结构强度,满足了其后续作为螺旋桨的结构强度要求,并且当控制系统发出信号后,可伸缩机翼开始绕艇体旋转,将在水下阻碍运动的机翼变成螺旋桨,为跨域航行器提供前进动力。
18.2.本发明提供的跨域航行器,在由水域向空域跨越过程,控制副翼舵和升降舵调整航行器姿态,位于艇体压缩空气释放,将压载水舱的水挤压喷出,从而达到垂直快速出水的目的。
附图说明
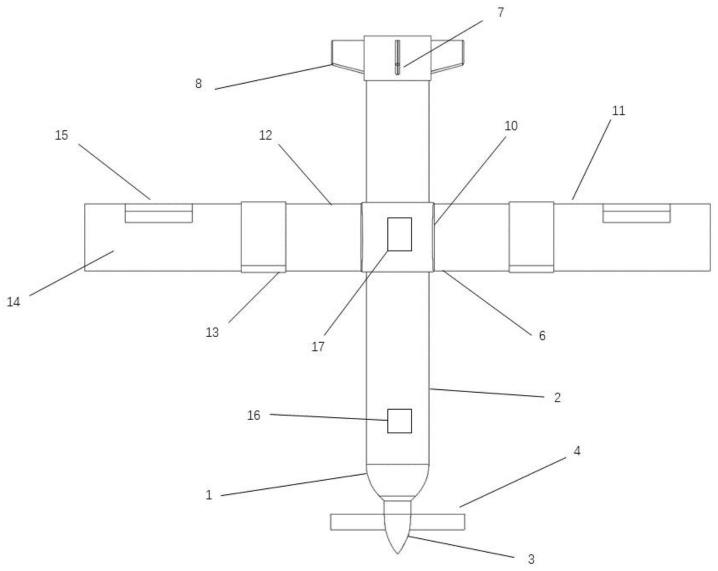
19.图1为本发明的俯视图;
20.图2为本发明的立体图;
21.图3为本发明的仰视图;
22.图4为收缩模式示意图;
23.图5为螺旋桨推进模式示意图。
具体实施方式
24.下面结合附图举例对本发明做更详细地描述:
25.结合图1-5,本发明一种水空两域跨介质航行器主要包括航行器艇首1和航行器艇体2,航行器艇首2设置整流罩3、螺旋桨4。航行器艇体2前中部下方设置压载水舱5,航行器艇体2中部设置跨域两用装置6。航行器艇体2尾部垂直设置方向舵7,在航行器艇体2尾部方向舵7的下方左右对称设置升降舵8。跨域两用装置6以径向转轴9为动力输出装置,带动可伸缩变体机翼11绕着航行器艇体2转动,跨域两用装置6左右两侧对称设置倾转机构10和可伸缩变体机翼11。可伸缩变体机翼11由內翼12、收容舱13、外翼14、副机翼15组成。空中飞行时外翼14从收容舱13伸展出来,全部展开为航行器提供升力水下潜航时,外翼14收缩至收
容舱13内,提高结构的强度,并减少可伸缩变体机翼11绕航行器艇体2转动产生的巨大力矩。
26.参照图1,一种水空两域跨介质航行器的推进系统包括两套功率不同的推进装置,小功率推进装置16设置在航行器艇体2前部,与航行器艇首1的螺旋桨4连接提供动力,大功率推进装置17设置航行器艇体2中部,与可伸缩变体机翼11连接提供动力。空中飞行时大功率推进装置17停止工作,水下潜航时大功率推进装置17开始工作。
27.参照图4、5,在水下收缩模式,可伸缩变体机翼11的外翼14收缩至收容舱13,收缩后內翼12和收容舱13是主要受力构件;在螺旋桨推进模式,倾转机构10通过调整收缩后可伸缩变体机翼11角度,使得其外形更接近双叶螺旋桨,此时可伸缩变体机翼11绕艇体转动的力矩可与螺旋桨4相平衡。
28.(1)水面起飞时,外翼14从收容舱13中伸展出来,可伸缩变体机翼11全部展开,压载水舱5充盈空气,航行器前部重量更轻,使得航行器艇首1向上抬起一定角度,有助于航行器水上起飞,通过调节螺旋桨4转速,控制副翼舵15、方向舵7、升降舵8可以实现航行器水面起飞动作。
29.(2)空中飞行时,可伸缩变体机翼11仍保持全部伸展,进入固定翼模式,航行器艇首1的螺旋桨4产生向前的拉力,通过机翼产生的升力,通过控制副翼舵15、方向舵7、升降舵8,对航行器的姿态进行控制,与固定翼飞机飞行方式基本相同。
30.(3)降落潜水时,航行器艇首1的螺旋桨4逐渐降低转速,控制副翼舵15、方向舵7、升降舵8使得航行器进入降落状态。航行器滑落水面过程,首先由压载水舱5与水面进行接触,破开水面后逐步入水,并保证航行器的其他部分仍处于空中,进入水面降落滑行状态,螺旋桨逐步降低转速直至停止,航行器艇体2逐渐落水,有效保证螺旋桨4、可伸缩变体机翼11等脆弱部件的安全。待航行器平稳降落在水面,压载水舱5进水口打开,使得跨域航行器潜入水中。
31.(4)水下潜航时,控制系统发出信号,可伸缩变体机翼11的外翼14全部收缩至收容舱13,可以增强可伸缩变体机翼11的强度,并减少绕航行器艇体2转动时所受力矩。收缩完毕后,可伸缩变体机翼11开始变体向双叶螺旋桨外形趋近,跨域两用装置6的倾转机构10调整可伸缩变体机翼11角度。待调整完毕,径向转轴9开始带动可伸缩变体机翼11绕航行器艇体2转动,产生向前的推力。通过控制方向舵7实现航行器水下潜航时的偏航运动,控制升降舵8实现航行器水下潜航时的俯仰运动。
32.(5)喷射出水时,控制方向舵7、升降舵8将航行器运动至水面附近,并调整姿态使航行器头部朝向水面,可伸缩变体机翼再次变体变回机翼模式,倾转机构10复回原位,外翼14从收容舱13伸展出来,可伸缩变体机翼11全部伸展,待姿态稳定后,高压空气释放将压载水舱5里面存储的压载水挤压喷射,航行器在反作用力下向水面运动,航行器艇首1的螺旋桨4加速转动,使跨域航行器达成喷射出水。
33.重复(1)-(5)即可实现航行器水空两域多次跨域航行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1