一种空间飞行器长期自主低燃耗伴飞方法与流程
1.本发明涉及空间在轨服务技术领域,具体涉及一种对目标实现空间飞行器长期自主低燃耗伴飞的方法。
背景技术:
2.随着航天技术应用领域的飞速拓展,空间在轨服务受到越来越多的重视,针对目标的长期自主伴飞任务也逐渐成为了服务飞行器即空间飞行器的必要功能。长时间伴飞过程中,服务飞行器所消耗的燃料,决定着服务飞行器在轨服务的成本。
3.目前空间飞行器的伴飞方式大致有两种:第一种为地面导引方式,由地面支持测控出空间飞行器针对目标星的相对运动状态,继而推算出长时间的自由漂移情况,将策略传给星上进行轨道调整;第二种为星上闭环伴飞控制,采用lqg控制算法,将星上相对导航输入的相对运动状态经算法处理后转为控制输出。然而前种方式不能实现星上自主,而后种方式由于连续喷气,消耗巨大,不适应于长时间的伴飞。因此,需要对现有的伴飞方式进行改进。
4.可以理解的是,上述陈述仅提供与本发明有关的背景技术,而并不必然地构成现有技术。
技术实现要素:
5.本发明的目的在于提供一种空间飞行器长期自主低燃耗伴飞方法,该方法采用星上自主的开环控制方式,可通过设定伴飞边界值和相关控制参数,使空间飞行器在给定伴飞区域内对目标飞行器即目标星进行长时间的低燃耗伴飞,可大幅提升空间飞行器的使用寿命。
6.为了达到上述目的,本发明通过以下技术方案实现:
7.一种空间飞行器长期自主低燃耗伴飞方法,包含:
8.s1、设定伴飞参数,设置空间飞行器的初始飘远模式、初始飘近模式和自由飘飞控制模式,当空间飞行器初始进入伴飞状态时,若其未靠近伴飞边界,则进入自由飘飞控制模式,若其靠近伴飞边界,则进入初始飘远模式或初始飘近模式,进而达到进入自由飘飞控制模式的条件,转为自由飘飞控制模式;
9.s2、伴飞切向控制,其包含对轨道系x轴相对速度进行调整;
10.s3、伴飞径向控制,其包含对轨道系z轴相对速度进行调整;
11.s4、伴飞法向控制,其包含对轨道系y轴相对速度进行调整。
12.可选的,所述伴飞参数包含:伴飞区域相关边界值、一轨漂移阈值、平面外控制阈值。
13.可选的,所述s2中,伴飞切向控制包含触碰伴飞边界值时的回飘控制和未触碰伴飞边界值时的调整控制,所述回飘控制为在服务飞行器触碰伴飞边界后,触发条件并施加控制使空间飞行器回飘至伴飞区域内,所述调整控制为自由飘飞一轨后进行半长轴调增控
制以减小一轨漂移距离。
14.可选的,若|x|《x_near,空间飞行器进入初始飘远模式,空间飞行器喷气远离目标星,速度增量为k
p
δv
p-v
x
;
15.若x_near≤|x|≤x_far,空间飞行器进入初始维持状态,空间飞行器维持轨道,速度增量为-v
x
;
16.若|x|>x_far,空间飞行器进入初始飘近模式,空间飞行器喷气飘近目标星,速度增量为-k
p
δv
p-v
x
;
17.其中,x为空间飞行器相对于目标星在x轴的实时坐标,x_near和x_far分别为所定义的伴飞区域的近边界和远边界,δv
p
为设定的固定值,v
x
表示当前相对导航输出x轴的相对速度,k
p
为标定系数。
18.可选的,所述s2中,记录空间飞行器进入停控飘飞时初始时刻系统时间和当前的两星沿x轴相对位置:[t0,x0],一个轨道周期后记录两星沿x轴的相对位置为x1,计算一轨的漂移量:delt_x=x
1-x0;
[0019]
若|2
·
x
1-x0|≥x_far,空间飞行器进行喷气靠近目标星,速度增量δv为
[0020][0021]
若|2
·
x
1-x0|<x_near,空间飞行器进行喷气远离目标星,速度增量δv为
[0022][0023]
其中,am为空间飞行器的半长轴,μ为引力常数,k
p
为标定系数,δv
p
为设定的固定值。
[0024]
可选的,δv
p
=0.05m/s;
[0025]
和/或,当空间飞行器初始在目标星后方时,k
p
=1;当空间飞行器初始在目标星前方时,k
p
=-1。
[0026]
可选的,所述s3中,对轨道系z轴相对速度进行调整,进而调节伴飞椭圆的构形大小,实时计算伴飞椭圆短半轴bf_tyb:
[0027][0028]
其中,r
mt
(3)和v
mt
(3)分别为相对导航输出的z轴相对位置和相对速度,ω为空间飞行器的角速度;
[0029]
当bf_tyb>z
max
时,沿x轴喷气执行时,空间飞行器进行喷气控制靠近目标星,速度增量为δvz=-vz,其中,z
max
为设定的z向最大漂移距离。
[0030]
可选的,z
max
=50m。
[0031]
可选的,所述s4中,通过对轨道系y轴相对速度进行调整,降低轨道平面外的漂移量;
[0032]
若|r
mt
(2)|>y
max
,记y
max
=|r
mt
(2)|,以更新y
max
,
[0033]
当|r
mt
(2)|≤y向预设阈值时,空间飞行器进行喷气控制远离目标星,速度增量δ
vy为
[0034][0035]
其中,r
mt
(2)为相对导航输出的y轴相对位置,y
max
为设定的y向最大漂移距离,am为空间飞行器的半长轴,μ为引力常数。
[0036]
可选的,y
max
=50m;
[0037]
和/或,|r
mt
(2)|≤2m。
[0038]
本发明与现有技术相比具有以下优点:
[0039]
本发明的一种空间飞行器长期自主低燃耗伴飞方法中,该方法采用星上自主的开环控制方式,可通过设定伴飞边界值和相关控制参数,使空间飞行器在给定伴飞区域内对目标飞行器即目标星进行长时间的低燃耗伴飞,可大幅提升空间飞行器的使用寿命。
[0040]
进一步的,该方法定义明确,具有普遍适应性:该方法通过设置伴飞边界值及少数控制参数,可实现针对目标星任意区域的伴飞,具有一定的普遍适应性。
[0041]
进一步的,该方法操作简单,可星上自主实现:该方法计算简便,过程明确,能够星上自主实现,提升了卫星自主化水平。
[0042]
进一步的,该方法开环控制,燃料消耗较小:不同于传统的lqg闭环伴飞控制,本发明提出的低燃耗伴飞方法,仅在触发伴飞边界条件后施加控制,控制次数较小,燃耗较低,能有效提升飞行器的使用寿命。
附图说明
[0043]
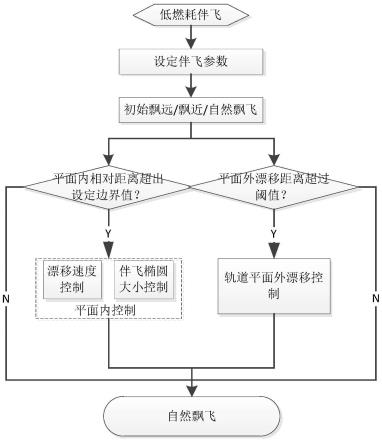
图1为本发明的一种空间飞行器长期自主低燃耗伴飞方法示意图;
[0044]
图2为本发明的一种空间飞行器低燃耗伴飞飞行示意图。
具体实施方式
[0045]
以下结合附图,通过详细说明一个较佳的具体实施例,对本发明做进一步阐述。
[0046]
由前述可知,对于某些针对在轨服务任务设计的飞行器,往往需要在目标飞行器附近进行长时间伴飞,以便于等待适合完成服务任务的时间窗口。长时间伴飞过程中,降低飞行器所消耗的燃料,可以显著提高飞行器的寿命。基于上述和前述问题,为了使在轨服务飞行器即空间飞行器实现对目标星的长期低燃耗伴飞,提升其使用寿命,本发明提出一种空间飞行器长期自主低燃耗伴飞方法,该方法用星上自主的开环控制方式,可通过设定伴飞边界值和相关控制参数,使服务飞行器在给定伴飞区域内对目标飞行器即目标星进行长时间的低燃耗伴飞。
[0047]
如图1所示,为本发明的一种空间飞行器长期自主低燃耗伴飞方法,该方法包含:
[0048]
s1、设定伴飞参数。在本实施例中,所述伴飞参数包含:伴飞区域相关边界值、一轨漂移阈值、平面外控制阈值等参数,可根据需求进行设置。
[0049]
为适应初始进入低燃耗伴飞时空间飞行器的不同飞行状况,本发明设置了三种空间飞行器的初始调整模式,分别为初始飘远模式、初始飘近模式和自由飘飞控制模式。通常情况下,设定的伴飞区域会在空间飞行器附近或者空间飞行器处于其中。当空间飞行器初始进入伴飞状态时,若其没有靠近设定的伴飞区域的伴飞边界,则进入自由飘飞控制模式;
若其靠近伴飞边界,则进入初始飘远模式或初始飘近模式对空间飞行器进行调整,进而使其达到进入自由飘飞控制模式的条件,进而转为自由飘飞控制模式。即若空间飞行器不在伴飞区域中或处于伴飞区域的边界附近时,调整空间飞行器使其位于伴飞区域内部,以便进入自由飘飞控制模式,实现低燃耗状态的自然飘飞。
[0050]
如图2所示,为本发明的一种空间飞行器低燃耗伴飞飞行示意图。在本实施例中,以目标星为轨道坐标系的原点,空间飞行器即服务飞行器对目标星进行伴飞。完成初始伴飞调节后,可进一步进行平面内漂移控制以及平面外漂移控制,所述平面内漂移控制主要针对xoz平面控制,所述平面外漂移控制主要针对y向控制。
[0051]
本发明在初始飘远/飘近/自由飘飞控制中,设计了三种不同的初始调节情况,以保证空间飞行器初始进入低燃耗伴飞时能在所指定伴飞区域内形成较小漂移率的伴飞。
[0052]
可选的,若|x|《x_near,空间飞行器进入初始飘远模式,空间飞行器喷气远离目标星,速度增量为k
p
δv
p-v
x
;
[0053]
若x_near≤|x|≤x_far,空间飞行器进入初始维持状态即自由飘飞状态,空间飞行器维持轨道,速度增量为-v
x
;
[0054]
若|x|>x_far,空间飞行器进入初始飘近模式,空间飞行器喷气飘近目标星,速度增量为-k
p
δv
p-v
x
;
[0055]
其中,x为空间飞行器相对于目标星在x轴的实时坐标,x_near和x_far分别为所定义的伴飞区域的近边界和远边界,δv
p
为设定的固定值,v
x
表示当前相对导航输出x轴的相对速度,k
p
为标定系数。
[0056]
在本实施例中,δv
p
=0.05m/s。进一步的,当空间飞行器初始在目标星后方时,k
p
=1;当空间飞行器初始在目标星前方时,k
p
=-1。可以理解但是,δv
p
和k
p
不仅限为上述,在其他实施例中,其还可以设置为其他数值或其他方式,本发明对此不加以限制。
[0057]
进一步的,该方法还包含:s2、伴飞切向控制。
[0058]
在本实施例中,伴飞切向控制主要对轨道坐标系x轴相对速度进行调整,通过调整相对半长轴的方式以减少每轨漂移量。此步骤有两层并联的控制,为触碰伴飞边界值时的回飘控制和未触碰伴飞边界值时的调整控制,前者在服务飞行器触碰伴飞边界后,触发条件(如切向伴飞边界值)并施加控制使服务飞行器回飘至伴飞区域内,后者为自由飘飞一轨后进行半长轴调增控制,可有效减小一轨漂移距离。
[0059]
具体的,在本实施例的s2中,记录空间飞行器进入停控飘飞时初始时刻系统时间和当前的两星(空间飞行器和目标星)沿x轴相对位置:[t0,x0],一个轨道周期后记录两星沿x轴的相对位置为x1,计算一轨的漂移量:delt_x=x
1-x0。并判断:
[0060]
若|2
·
x
1-x0|≥x_far,空间飞行器进行喷气靠近目标星,速度增量δv为
[0061][0062]
若|2
·
x
1-x0|<x_near,空间飞行器进行喷气远离目标星,速度增量δv为
[0063][0064]
其中,am为空间飞行器的半长轴,μ为引力常数,k
p
为标定系数,δv
p
为设定的固定
值。
[0065]
s3、伴飞径向控制。
[0066]
在本实施例中,伴飞径向控制主要对轨道系z轴相对速度进行调整,进而调节伴飞椭圆的构形大小。由于x轴与z轴都属于轨道平面内的控制,是耦合在一起的,因此当z向相对距离超过阈值触发控制时,需要x轴和z轴同时进行调整。
[0067]
具体的,在本实施例的s3中,伴飞径向控制是对轨道系z轴相对速度进行调整,进而调节伴飞椭圆的构形大小,实时计算伴飞椭圆短半轴bf_tyb:
[0068][0069]
其中,r
mt
(3)和v
mt
(3)分别为相对导航输出的z轴相对位置和相对速度,ω为空间飞行器的角速度;
[0070]
当bf_tyb>z
max
时,沿x轴喷气执行时,空间飞行器进行喷气控制靠近目标星,速度增量为δvz=-vz,其中,z
max
为设定的z向最大漂移距离。在本实施例中,z
max
=50m,可以理解的是,在其他实施例中,z
max
为其他数值。
[0071]
s4、伴飞法向控制。
[0072]
在本实施例中,伴飞法向控制主要对轨道系y轴相对速度进行调整,由于y轴与xoz平面时解耦的,因此y向控制可独立于轨道平面内控制之外。通过实时计算得出y向漂移的最大距离y
max
,在y向相对位置过0点即原点时施加控制,以减小平面外的振幅。
[0073]
具体的,在本实施例的s4中,伴飞法向控制是通过对轨道系y轴相对速度进行调整,降低轨道平面外的漂移量。
[0074]
若|r
mt
(2)|>y
max
,记y
max
=|r
mt
(2)|,以更新y
max
。
[0075]
当|r
mt
)2)|≤y向预设阈值时,空间飞行器进行喷气控制远离目标星,速度增量δvy为
[0076][0077]
其中,r
mt
(2)为相对导航输出的y轴相对位置,y
max
为设定的y向最大漂移距离,am为空间飞行器的半长轴,μ为引力常数。在本实施例中,v
mt
(2)为相对导航输出的y轴相对速度,空间飞行器的喷气方向为-v
mt
(2),即-v
mt
(2)>0时为轨道+y方向,否则为轨道-y方向。
[0078]
在本实施例中,初值设定y向最大漂移距离y
max
=50m;进一步的,|r
mt
(2)|≤2m,即y向预设阈值为2,当然,y向预设阈值也可为其他数值,因期望在y向相对位置过0时施加控制,以减小平面外的振幅,该值取值无需过大。
[0079]
综上所述,本发明的一种空间飞行器长期自主低燃耗伴飞方法中,该方法采用星上自主的开环控制方式,可通过设定伴飞边界值和相关控制参数,使空间飞行器在给定伴飞区域内对目标星进行长时间的低燃耗伴飞,可大幅提升空间飞行器的使用寿命。
[0080]
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1