对日观测摆扫机动成像的姿态规划与控制的方法及系统与流程
本发明涉及航天器,具体地,涉及一种日观测摆扫机动成像的姿态规划与控制的方法及系统。
背景技术:
1、某型号对日观测卫星装载有空间光学望远镜,需要对太阳进行全日面观测。由于空间光学望远镜视场角的限制,导致对太阳的覆盖宽度较小。因此,可以利用卫星的姿态控制能力,通过连续的摆扫姿态机动来调整望远镜主轴的对日指向,快速高效的实现光学望远镜对日观测的全覆盖全日面成像。
2、专利文献cn104281150a公开了一种姿态机动的轨迹规划方法,该方法的步骤包括:(1)确定特征主轴和欧拉角;(2)对欧拉角进行轨迹规划得到特征主轴方向上的规划角速度函数和规划角度函数;(3)计算姿态机动过程中的规划四元数函数和规划目标角速度函数;(4)输出规划四元数函数和规划目标角速度函数到外部控制系统。但是,该专利文献是一种最短路径的姿态规划方法。
3、专利文献cn104848860a公开了一种敏捷卫星成像过程姿态机动规划方法,根据指定的地面成像条带的起始与结束地理位置以及两个端点对应的成像时间,计算每个时间点对应的成像点位置,得到卫星在成像过程中规划的姿态信息。但是,该专利文献是指定地面成像条带的起始与结束地理位置的姿态机动规划方法。
4、专利文献cn105444780a公开了星载摆扫式光学相机图像定位验证系统及处理方法,首先根据指定的地面成像条带的起始与结束地理位置以及两个端点对应的成像时间,计算每个时间点对应的成像点位置;然后根据卫星的轨道参数以及对应时刻的成像点位置,计算卫星与成像点在地心赤道惯性坐标系中的相对位置矢量;再根据地心赤道惯性坐标系到卫星轨道坐标系的一系列转换矩阵,计算相对位置矢量在卫星本体坐标系中的分量;随后根据相对位置矢量在卫星轨道坐标系中的分量,计算卫星成像时的滚转角和俯仰角以及滚转角速度和俯仰角速度;最后根据得到的滚转角、滚转角速度、俯仰角和俯仰角速度,轨道参数以及对应的成像点位置计算卫星的偏航角与偏航角速度,得到卫星在成像过程中规划的姿态信息。但是,该专利文献是一种摆扫式光学相机。
5、专利文献cn105867395a公开了一种利用滑膜变结构控制的深空探测器约束姿态机动规划方法。利用滑膜变结构控制方法设计满足动力学和运动学约束、控制力矩有界约束的控制率;采用几何规避方法求出可满足禁忌约束的姿态四元数,得到同时满足动力学、运动学约束、控制力矩有界约束和禁忌约束的路径节点和生成节点的控制力矩,生成探测器姿态机动路径和所需要的控制力矩,实现探测器机动到目标姿态。但是,该专利文献用于设计满足动力学和运动学约束、控制力矩有界约束的控制率。
6、专利文献cn108508905a公开了一种考虑空间轴进行最短路径姿态机动的方法,包括:进行角速度消旋控制;采集第1拍四元素信息计算当前姿态相对期望姿态的绕空间轴偏转角度和空间轴在坐标系中的方向矢量;判定所采用的机动方式,并计算存储对应的参数信息;根据时间的变化,计算绕空间轴的瞬时转角;根据瞬时转角及空间轴的方向矢量信息计算获得导引律姿态四元素信息;根据前后采样周期计算获得的四元素信息计算导引律姿态角速度;以及利用轮控pd控制算法计算控制力矩输出。该方法可兼顾大角度姿态机动和小角度姿态机动的情况。但是,该专利文献主要用于解决卫星姿态机动的快速性问题。
7、目前,对日观测摆扫机动成像未见研究。因此市场上需要一种日观测卫星摆扫机动成像的姿态规划与控制的方法及系统,解决卫星装载的空间光学望远镜因视场受限而无法对太阳进行全覆盖观测的问题。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种日观测摆扫机动成像的姿态规划与控制的方法及系统。
2、根据本发明提供的一种对日观测摆扫机动成像的姿态规划与控制的方法,包括:
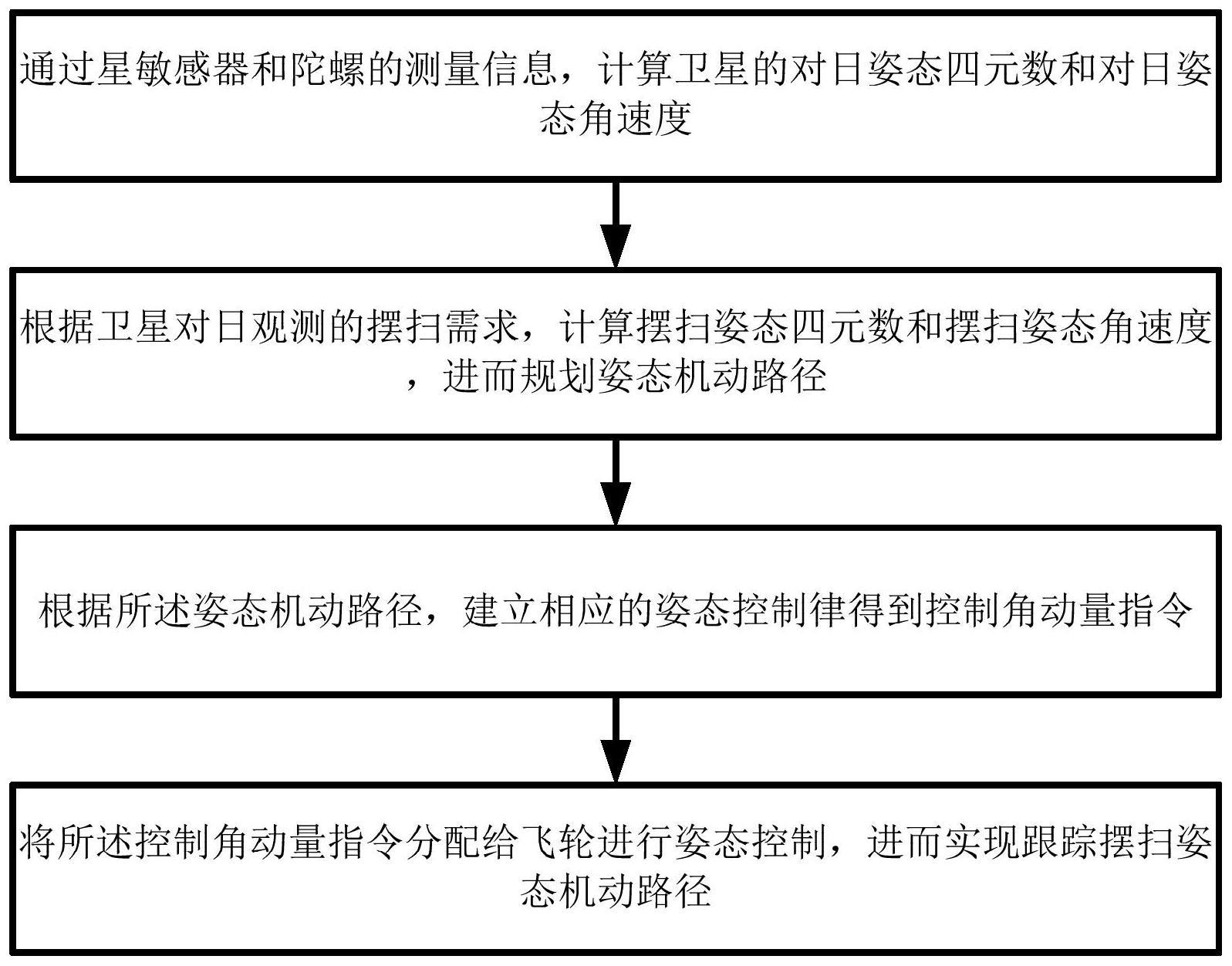
3、步骤s1:通过星敏感器和陀螺的测量信息,计算卫星的对日姿态四元数和对日姿态角速度;
4、步骤s2:根据卫星对日观测的摆扫需求,计算摆扫姿态四元数和摆扫姿态角速度,进而规划姿态机动路径;
5、步骤s3:根据所述姿态机动路径,建立相应的姿态控制律得到控制角动量指令;
6、步骤s4:将所述控制角动量指令分配给飞轮进行姿态控制,进而实现跟踪摆扫姿态机动路径。
7、优选地,所述步骤s1包括:
8、步骤s1.1:根据星敏感器测得的四元数和星敏感器安装四元数,解算得到惯性坐标系到卫星本体坐标系的姿态四元数qib;
9、步骤s1.2:根据陀螺测得的角速度和陀螺安装矩阵,解算得到惯性坐标系到卫星惯性角速度,记为ωbi;
10、步骤s1.3:计算对日坐标系到本体坐标系的姿态四元数,公式如下:
11、
12、式中,qsunb表示卫星的对日姿态四元数,qisun表示惯性坐标系到对日坐标系的姿态四元数,qib表示惯性坐标系到卫星本体坐标系的姿态四元数;
13、步骤s1.4:计算卫星的对日姿态角速度,公式如下:
14、
15、
16、式中,ωbsunx、ωbsuny、和ωbsunz分表表示卫星x、y和z轴的对日姿态角速度,ωbix、ωbiy和ωbiz分别表示卫星x、y和z轴的惯性角速度,absun表示卫星本体坐标系与对日坐标系的转换矩阵,q0、q1、q2和q3分别表示卫星姿态四元数,ωsuni表示对日坐标系惯性角速度。
17、优选地,所述步骤s2包括:
18、步骤s2.1:计算摆扫过程的加速度,公式如下:
19、
20、式中,ax表示摆扫过程的加速度,ajs表示卫星摆扫过程中匀速阶段加速度,ωys表示卫星摆扫过程中匀速阶段角速度,ωx表示摆扫过程的角速度;
21、步骤s2.2:计算滚动轴摆扫姿态角速度和摆扫姿态角,计算公式如下:
22、ωx,k+1=ωx,k+axt
23、αx,k+1=αx,k+ωyst
24、式中,ωx,k+1和αx,k+1分别表示第k+1步摆扫角速度、摆扫姿态角,ωx,k和αx,k分别表示第k步摆扫角速度、摆扫姿态角,t表示计算周期;
25、步骤s2.3:计算摆扫姿态四元数和摆扫姿态角速度,计算公式如下:
26、
27、
28、式中,qbaisao和ωbaisao分别表示摆扫姿态四元数和摆扫姿态角速度。
29、优选地,所述步骤s3包括:
30、步骤s3.1:计算摆扫时的控制用姿态四元数qc,公式如下:
31、
32、式中,qsunb表示卫星的对日姿态四元数,qbaisao摆扫姿态四元数;
33、步骤s3.2:根据对日姿态角速度,计算控制用姿态角速度,公式如下:
34、
35、式中,ωcx、ωcy和ωcz分别表示x、y和z轴控制用姿态角速度,ωbsunx、ωbsuny、和ωbsunz分表表示卫星x、y和z轴的对日姿态角速度,ωbaisao表示摆扫姿态角速度;
36、步骤s3.3:以卫星姿态角和卫星角速度作为输入,三轴控制指令角动量,建立姿态控制律如下:
37、卫星姿态角
38、卫星角速度为ωx,ωy,ωz
39、其中,θ和ψ分别表示卫星滚动角、俯仰角、偏航角,q0、q1、q2和q3分别表示卫星姿态四元数,ωx,ωy,ωz分别表示卫星滚动角速度、俯仰角速度、偏航角速度;
40、步骤s3.4:计算得到三轴控制指令角动量,计算公式如下:
41、
42、
43、
44、
45、式中,hcx、hcy和hcz分别表示x、y和z轴的控制指令角动量,kp1,kp2,kp3为控制参数中比例系数,kd1,kd2,kd3示控制参数中阻尼系数,tmagx、tmagy和tmagz分别表示x、y和z轴磁卸载前馈力矩,tdmx、tdmy和tdmz分别表示x、y和z轴摆扫过程中产生的前馈力矩,i表示星体的转动惯量,ax表示摆扫加速度。
46、优选地,参与控制的n个飞轮的转速指令如下所示:
47、
48、其中,rrwi、rrwm表示第i个、第m个飞轮转速指令,d表示卫星的飞轮角动量指令分配矩阵、knms2rpm表示飞轮角动量转换系数,hcx、hcy和hcz分别表示表示x、y和z轴的控制指令角动量。
49、根据本发明提供的一种对日观测摆扫机动成像的姿态规划与控制的系统,包括:
50、模块m1:通过星敏感器和陀螺的测量信息,计算卫星的对日姿态四元数和对日姿态角速度;
51、模块m2:根据卫星对日观测的摆扫需求,计算摆扫姿态四元数和摆扫姿态角速度,进而规划姿态机动路径;
52、模块m3:根据所述姿态机动路径,建立相应的姿态控制律得到控制角动量指令;
53、模块m4:将所述控制角动量指令分配给飞轮进行姿态控制,进而实现跟踪摆扫姿态机动路径。
54、优选地,所述模块m1包括:
55、模块m1.1:根据星敏感器测得的四元数和星敏感器安装四元数,解算得到惯性坐标系到卫星本体坐标系的姿态四元数qib;
56、模块m1.2:根据陀螺测得的角速度和陀螺安装矩阵,解算得到惯性坐标系到卫星惯性角速度,记为ωbi;
57、模块m1.3:计算对日坐标系到本体坐标系的姿态四元数,公式如下:
58、
59、式中,qsunb表示卫星的对日姿态四元数,qisun表示惯性坐标系到对日坐标系的姿态四元数,qib表示惯性坐标系到卫星本体坐标系的姿态四元数;
60、模块m1.4:计算卫星的对日姿态角速度,公式如下:
61、
62、
63、式中,ωbsunx、ωbsuny、和ωbsunz分表表示卫星x、y和z轴的对日姿态角速度,ωbix、ωbiy和ωbiz分别表示卫星x、y和z轴的惯性角速度,absun表示卫星本体坐标系与对日坐标系的转换矩阵,q0、q1、q2和q3分别表示卫星姿态四元数,ωsuni表示对日坐标系惯性角速度。
64、优选地,所述模块m2包括:
65、模块m2.1:计算摆扫过程的加速度,公式如下:
66、
67、式中,ax表示摆扫过程的加速度,ajs表示卫星摆扫过程中匀速阶段加速度,ωys表示卫星摆扫过程中匀速阶段角速度,ωx表示摆扫过程的角速度;
68、模块m2.2:计算滚动轴摆扫姿态角速度和摆扫姿态角,计算公式如下:
69、ωx,k+1=ωx,k+axt
70、αx,k+1=αx,k+ωyst
71、式中,ωx,k+1和αx,k+1分别表示第k+1步摆扫角速度、摆扫姿态角,ωx,k和αx,k分别表示第k步摆扫角速度、摆扫姿态角,t表示计算周期;
72、模块m2.3:计算摆扫姿态四元数和摆扫姿态角速度,计算公式如下:
73、
74、
75、式中,qbaisao和ωbaisao分别表示摆扫姿态四元数和摆扫姿态角速度。
76、优选地,所述模块m3包括:
77、模块m3.1:计算摆扫时的控制用姿态四元数qc,公式如下:
78、
79、式中,qsunb表示卫星的对日姿态四元数,qbaisao摆扫姿态四元数;
80、模块m3.2:根据对日姿态角速度,计算控制用姿态角速度,公式如下:
81、
82、式中,ωcx、ωcy和ωcz分别表示x、y和z轴控制用姿态角速度,ωbsunx、ωbsuny、和ωbsunz分表表示卫星x、y和z轴的对日姿态角速度,ωbaisao表示摆扫姿态角速度;
83、模块m3.3:以卫星姿态角和卫星角速度作为输入,三轴控制指令角动量,建立姿态控制律如下:
84、卫星姿态角
85、卫星角速度为ωx,ωy,ωz
86、其中,θ和ψ分别表示卫星滚动角、俯仰角、偏航角,q0、q1、q2和q3分别表示卫星姿态四元数,ωx,ωy,ωz分别表示卫星滚动角速度、俯仰角速度、偏航角速度;
87、模块m3.4:计算得到三轴控制指令角动量,计算公式如下:
88、
89、
90、
91、
92、式中,hcx、hcy和hcz分别表示x、y和z轴的控制指令角动量,kp1,kp2,kp3和kd1,kd2,kd3均为控制参数,tmagx、tmagy和tmagz分别表示x、y和z轴磁卸载前馈力矩,tdmx、tdmy和tdmz分别表示x、y和z轴摆扫过程中产生的前馈力矩,i表示星体的转动惯量,ax表示摆扫加速度。
93、优选地,参与控制的n个飞轮的转速指令如下所示:
94、
95、其中,rrwi、rrwm表示第i个、第m个飞轮转速指令,d表示卫星的飞轮角动量指令分配矩阵、knms2rpm表示飞轮角动量转换系数,hcx、hcy和hcz分别表示表示x、y和z轴的控制指令角动量。
96、与现有技术相比,本发明具有如下的有益效果:
97、本发明通过设计卫星摆扫姿态规划算法和姿态控制算法,利用星敏的姿态测量信息和陀螺的姿态角速度测量信息,将星体当前对日姿态与摆扫姿态的姿态误差四元数作为姿态控制基准以实现任意姿态最短路径机动;以飞轮作为姿态控制执行机构,设计pd控制律,在摆扫过程中对进行前馈产生的前馈力矩进行控制,实现卫星的连续摆扫机动,达到空间望远镜的全日面观测。
- 还没有人留言评论。精彩留言会获得点赞!