一种用于安装微波雷达的云台装置及其控制系统
1.本发明属于自动控制技术领域,涉及无人机云台,特别涉及一种用于安装微波雷达的云台装置及其控制系统。
背景技术:
2.微波雷达具有高分辨率、穿透力强和低功耗穿透性的优点,能够实现土壤尤其是覆被土壤相关信息的获取,实现对土壤信息的全天候、全天时监测。而无人机微波遥感凭借运载便利、灵活性高、作业周期短、数据分辨率高等优势,有效克服了卫星遥感技术受天气影响大、时空分辨率较低、受过境周期限制等缺点,成为实现大面积农田尺度快速、精准感知土壤信息的新手段。然而,无人机机载雷达数据入射角、照射面积、幅宽,多光谱数据分辨率、重叠度等因素受无人机飞行姿态、飞行稳定性及地面坡度的影响较大,必须具备专门云台安装微波雷达,实现微波雷达姿态保持、数据传输等功能。
3.现有的机载云台装置结构复杂,非标件较多,加工成本高,产品外观无法达到工业化生产的要求。云台结构之间摩擦力的存在导致相对运动需要电机提供更大的动力,运行过程中进行重心调节相对困难,云台会发生剧烈地晃动,进而造成搭载的微波雷达设备不稳定,影响微波雷达数据的传输,同时在无人机工作期间由于无人机的抖动以及倾斜都会对数据传输和接收产生严重影响。鉴于以上问题,急需一种结构简单,调节方便,性能稳定的机载云台结构。
技术实现要素:
4.为了克服上述现有技术的缺点,解决无人机机体姿势不稳定、数据受地形变化影响大的问题,本发明的目的在于提供一种用于安装微波雷达的云台装置及其控制系统,通过姿态采集模块对雷达俯仰角实时监控,并通过电机驱动电路实时调整雷达俯仰角,以此解决云台不稳定,探测效果不好的技术难题。
5.为了实现上述目的,本发明采用的技术方案是:
6.一种用于安装微波雷达的云台装置,所述云台装置固定于无人机的正下方,包括上臂、下臂、云台盒子、减震单元、数据传输单元和姿态调整单元,微波雷达固定于云台盒子的下方;
7.所述减震单元连接上臂与无人机底盘安装架,以实现减震功能;
8.所述数据传输单元包括云台主控制板,将微波雷达采集到的数据实时传输到电脑端;
9.所述姿态调整单元包括三相直流无刷电机一和三相直流无刷电机二,三相直流无刷电机一固定在下臂上,转动轴为y向,并与云台盒子连接,三相直流无刷电机二固定在上臂的底端,转动轴为x向,并与下臂连接,通过上臂与下臂之间以及下臂与云台盒子之间的相对运动,使得微波雷达在无人机飞行过程中保持入射角与地面为45
°
俯角。
10.在一个实施例中,所述上臂呈倒l型,其顶部的水平臂用于与减震单元连接,所述
下臂呈水平放置的l型,其一臂外侧与所述三相直流无刷电机二的转动轴连接,另一臂内侧固定所述三相直流无刷电机一。
11.在一个实施例中,所述减震单元包括上减震板、下减震板和若干减震柱,所述若干减震柱连接于上减震板和下减震板之间,所述上减震板与所述无人机底盘安装架固定连接,所述下减震板与所述上臂固定连接。所述上减震板通过四个减震柱与下减震板固定;所述上减震板、下减震板使用碳纤维板制作,四个减震柱使用橡胶制作。
12.在一个实施例中,所述云台盒子外形为长方体状,内部中空,所述云台主控制板固定于云台盒子内部。
13.本发明还提供了一种所述用于安装微波雷达的云台装置的控制系统,包括姿态采集模块、无线传输模块、电源模块和直流稳压模块;所述云台主控制板包括mcu处理电路、电机驱动电路以及串口和通信电路;
14.所述姿态采集模块,用于测量微波雷达的俯仰角和线加速度;
15.所述无线传输模块,用于将微波雷达采集的数据传输至云台主控制板,云台主控制板将数据传输至电脑端;
16.所述电源模块及直流稳压模块,用于为云台主控制板提供稳定直流电压;
17.所述mcu处理电路,与所述姿态采集模块连接,接收其测量数据,并输出控制脉冲;
18.所述电机驱动电路,用于根据所述控制脉冲,控制云台装置的转角,完成微波雷达的水平和俯仰调整,实现雷达的姿态保持功能;
19.所述串口下载电路和通信电路,用于烧录程序、提供电源接口。
20.在一个实施例中,所述姿态采集模块安装于所述云台主控制板,所述电机驱动电路根据所述控制脉冲,控制三相直流无刷电机一和三相直流无刷电机二的转角,进而通过上臂与下臂之间以及下臂与云台盒子之间的相对运动,实现云台装置的姿态保持功能。
21.在一个实施例中,所述云台主控制板使用定时器周期性获取姿态采集模块测量的俯仰角;当当前俯仰角与设定的45
°
俯角的偏差超出预设值时,姿态采集模块将无人机飞行时微波雷达的俯仰角转换成电信号发送给mcu处理电路;所述mcu处理电路根据该电信号以控制脉冲的形式向所述电机驱动电路发送指令;所述电机驱动电路向三相直流无刷电机一和三相直流无刷电机二的驱动芯片发送pwm信号进行角度调整。
22.在一个实施例中,所述串口下载电路和通信电路互为复用电路,在mcu处理电路调试期间通过usb接口将写好的程序烧录到mcu处理电路中。
23.在一个实施例中,所述程序为姿态调整程序、地面坡度解算程序;所述姿态调整程序先获取当前状态下微波雷达的俯仰角,计算与45
°
俯角之间的偏差角,然后通过电机驱动电路调整电机角度,实现姿态稳定的功能;所述地面坡度结算程序通过微波返回的时间先判断出此时地面存在坡度,通过无人机飞行速度以及微波返回的时间差解算出此时的地面坡度,与当前云台俯仰角度对比,计算云台应调整的角度,实现地面坡度自适应调整功能。
24.在一个实施例中,所述无线传输模块将微波雷达的数据传输给云台主控制板,所述云台主控制板通过微波返回的时间解算地面坡度,调整电机转角,使微波雷达与地面保持45
°
俯角,此时云台会重新进入新的自稳状态。
25.在一个实施例中,本发明还包括指示灯电路,指示灯电路用于显示sd卡是否与卡槽正常连接;所述卡槽位于云台主控制板下方,其槽口与云台主控制板边缘相平。
26.在一个实施例中,所述直流电压模块安装于所述云台主控制板,无人机通过分压板为云台提供12v的直流电压,采用dc-dc可调降压模块为云台主控制板提供稳定10v直流电压;所述可调降压dc-dc模块采用了lm2596s降压芯片,输出的纹波较小。
27.与现有技术相比,本发明的有益效果是:
28.(1)本发明主要通过上臂、下臂与两个三相直流无刷电机实现微波雷达的水平和俯仰调整,结合该云台装置的控制系统,实现姿态保持的功能,有效提高探测效果。
29.(2)本发明可以自主调整云台的角度,然后重新进入新的自稳状态,能够适应平原、丘陵和山地,极大程度上增强了本发明的实用性。
30.(3)本发明设计的减震单元可以减小无人机传递到云台上的震动,为微波雷达提供更加良好的工作环境。
31.(4)本发明可以实现数据实时传输的功能,电脑端可以及时获取信息、处理信息,及时了解微波雷达的探测结果。
32.(5)本发明结构简单,安装效率高,操作和维修成本较低,结构之间摩擦阻力小,重心调节相对简单,搭载雷达更稳定。
33.(6)本发明本发明设计的线路噪声小,系统的抗干扰能力强,信号间的交叉干扰小。
附图说明
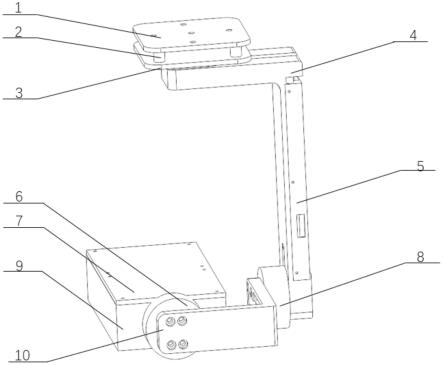
34.图1为本发明云台装置结构示意图。
35.图2为本发明mcu处理电路图。
36.图3为本发明控制电路的复位电路图。
37.图4为本发明稳压电路图。
38.图5-7为本发明电机驱动电路图。
39.图8-9为本发明串口下载电路图。
40.图10为本发明通信电路图。
41.图11为本发明指示灯电路图。
42.图12为本发明工作流程图。
43.图13为本发明控制系统结构框图。
44.附图标记说明:1—上减震板;2—减震柱;3—下减震板;4—上臂;5—上臂盖板;6—三相直流无刷电机一;7—云台盖子;8—三相直流无刷电机二;9—云台盒子;10—下臂。
具体实施方式
45.下面结合附图和实施例详细说明本发明的实施方式。
46.本发明为一种用于安装微波雷达的云台装置,所述云台装置固定于无人机的正下方,具有减震功能、姿态保持功能、数据传输功能以及自主调整功能,在无人机飞行过程中减震单元可以有效缓解无人机机体震动对云台的影响,云台保持微波雷达与地面为45
°
俯角,且可以自主调整云台角度,并将微波雷达采集到的数据实时传输到电脑端。
47.云台装置的一种具体机械结构参考图1所示,包括上臂4和下臂10,上臂4的顶端用于与无人机连接,底端固定三相直流无刷电机二8,三相直流无刷电机二8的转动轴与下臂
10连接,下臂10上固定三相直流无刷电机一6,三相直流无刷电机一6的转动轴与云台盒子9连接,云台盒子9用于承载云台主控制板,通过云台主控制板可实现数据传输功能。三相直流无刷电机二8的转动轴为x向,三相直流无刷电机一6的转动轴为y向,通过上臂4与下臂10之间以及下臂10与云台盒子9之间的相对运动,可实现雷达的姿态保持功能。
48.在一个实施例中,上臂1呈倒l型,其顶部的水平臂可用于与无人机的底盘连接,下臂10则呈水平放置的l型,其一臂外侧与三相直流无刷电机二8的转动轴连接,另一臂内侧固定三相直流无刷电机一6。
49.本发明中,微波雷达固定安装于云台盒子9的底面,发射端向下。在一个实施例中,云台盒子9外形为长方体状,内部中空,顶部配有可根据需要开启的云台盖子7,云台主控制板可通过螺钉固定于云台盒子9内部。
50.示例地,在上臂4的外侧面可设置置线凹槽和上臂盖板5,上臂盖板5用于覆盖位于置线凹槽中的重要线路,防止因环境因素造成的线路损坏。
51.进一步地,本发明还提供了该云台装置的控制系统,包括姿态采集模块、无线传输模块、直流电压模块和云台主控制板;其中,云台主控制板包括mcu处理电路、电机驱动电路以及串口和通信电路。各部分的主要功能与原理如下:
52.姿态采集模块,用于测量微波雷达的俯仰角和线加速度;
53.无线传输模块,将微波雷达采集的数据传输给云台,云台将数据传给电脑端;
54.直流稳压模块,用于为云台主控制板提供稳定直流电压;
55.mcu处理电路与姿态采集模块连接,接收其测量数据,并输出控制脉冲。
56.电机驱动电路用于根据控制脉冲,控制云台装置的转角,完成微波雷达的水平和俯仰调整,实现雷达的姿态保持功能。
57.串口下载电路和通信电路,用于烧录程序、提供电源接口。
58.具体地,本发明姿态采集模块采用mpu-6050,可安装于云台主控制板,并通过iic等方式与云台主控制板通信,云台主控制板使用定时器周期性获取角度传感器测量的俯仰角。mpu6050对载体运动的角度、线加速度很敏感,无需外界信号就能探测载体的姿态和状态变化,利用mpu6050的定轴性和进动性,可在无人机飞行过程中建立不变的基准,从而测量雷达的俯仰角和线加速度。
59.如图2所示,mcu处理电路包括处理器u1和外围电路,外围电路包括振荡电路、复位电路和稳压电路。其中处理器u1为atsam3x8e系列芯片,功能主要是通过i/o接口接收角度传感器输入的测量数据,并向电机驱动电路输出控制脉冲。在图2所示的电路中,处理器u1的pc26引脚与pa29引脚相接、pa28引脚与pc29引脚相接;gnd引脚、gnd1引脚、gnd2引脚、gnd3引脚、gnd4引脚、gndutm1引脚、gndbu引脚、gndana引脚、jtagsel引脚均接gndtst引脚通过电阻r1接gnd,vbg通过电阻r4接gnd且电阻r4并联电容c6;vddbu引脚、vddio1引脚、vddio2引脚、vddio3引脚、vddio4引脚、vddin引脚均接vcc 3.3,vddana通过电感l1接vcc3.3、vddutm1通过电感l2接vcc 3.3;vddout引脚与vddcore1引脚、vddcoree2引脚、vddcore3引脚、vddcore4引脚、vddcore5引脚相接,vddout引脚通过电阻r18与vcc 3.3相接;vddpll引脚通过电感l3与vddout引脚相接再通过电阻r18与vcc 3.3相接;vddana引脚外接的并联电容c20、电容c23与vddutm1引脚外接的并联电容c21、电容c22并联通过并联电容c24、电容c25与vddpll引脚相接;fwup引脚通过电阻r11输出3.3v,pc0接mos管源极、mos
管栅极通过电阻r8与mos管漏极相接并输出3.3v,reset cmd一端连接nrstb引脚一端通过电阻r13输出3.3v且该端通过电阻r14接gnd;led引脚通过电阻r22和发光二极管d3与gnd相接,接vcc3.3通过电阻r24和发光二极管d3与rxl引脚相接,接vcc3.3通过电阻r25和发光二极管d4与txl引脚相接。
60.振荡电路功能是产生交流电振荡,作为处理器u1的信号源,在图2所示的电路中,振荡电路连接到处理器u1的xtal-out引脚与xtal-in引脚之间,xtal-out引脚与xtal-in引脚通过晶振y1相接,晶振接gnd。
61.复位电路功能是使mcu处理电路恢复到起始状态,在图3所示的电路中,复位电路电路连接到处理器u1的3.3v电压端,key1一端通过电阻r23与3.3v电压端相接,一端通过电容c26接gnd且电容c26并联开关k2;key2一端通过电阻r26与3.3v电压端相接,一端通过电容c35接gnd且电容c35并联开关k3;key3一端通过电阻r27与3.3v电压端相接,一端通过电容c38接gnd且电容c38并联开关k4。
62.稳压电路功能是给mcu处理电路提供稳定的3.3v电压,在图4所示的电路中,稳压电路包括两个u6ams1117芯片、电容c27、电容c28、电容c29、电容c30、电容c31、电容c32、电容c33、电容c34;电容c28一端与5.0v端电压相接并连接到in引脚,一端接gnd,电容c28并联电容c27,电容c29一端连接out引脚输出3.3v电压,一端连接gnd,电容c29并联电容c30,adj引脚接gnd;电容c32一端与5.0v端电压相接并连接到in引脚,一端接gnd,电容c32并联电容c31,电容c33一端连接out引脚输出3.3v电压,一端连接gnd,电容c33并联电容c34,adj引脚接gnd。
63.电机驱动电路根据控制脉冲,控制三相直流无刷电机一6和三相直流无刷电机二4的转角,进而通过上臂1与下臂8之间以及下臂8与云台盒子7之间的相对运动,实现雷达的姿态保持功能。
64.如图5、图6和图7所示,电机驱动电路包括驱动芯片u2、驱动芯片u3和微控制器u4。
65.驱动芯片u2、u3均为drv8313系列芯片,分别是三相直流无刷电机一和三相直流无刷电机二的专用驱动芯片;驱动芯片u2通过in1引脚、in2引脚、in3引脚分别与微控制器u4的pd3引脚、pd5引脚、pd6引脚、相连,驱动芯片u2的cp1引脚与cp2引脚通过电容c1相连,vcp引脚与vm引脚通过电容c2相连;pgnd1引脚、pgnd2引脚、pgnd3引脚接gnd;en1引脚、en2引脚、en3引脚与v3p3out引脚相接,v3p3out引脚通过电阻r5和电容c7接gnd;reset引脚与sleep引脚相接,sieep引脚通过电容c7接gnd;三相无刷直流电机通过插座与驱动芯片u2的out1引脚、out2引脚、out3引脚相连,三相无刷直流电机并联三个电容电容c3、电容c4、电容c5。
66.驱动芯片u3通过in1引脚、in2引脚、in3引脚分别与微控制器u4的pb1引脚、pb2引脚、pb3引脚相连,驱动芯片u3的cp1引脚与cp2引脚通过电容c9相连,vcp引脚与vm引脚通过电容c11相连;pgnd1引脚、pgnd2引脚、pgnd3引脚接gnd;en1引脚、en2引脚、en3引脚与v3p3out引脚相接,v3p3out引脚通过电阻r7和电容c16接gnd;reset引脚与sleep引脚相接,sieep引脚通过电容c16接gnd;三相无刷直流电机通过插座与驱动芯片u3的out1引脚、out2引脚、out3引脚相连,三相无刷直流电机并联三个电容电容c12、电容c13、电容c14。
67.微控制器u4外围电路包括振荡电路、复位电路、isp模块,微控制器u4为atmega328p-au系列芯片,微控制器u4接收处理器u1的控制脉冲,随后发送pwm信号给驱动
芯片u2和u3;驱动芯片u2和u3将脉冲信号放大传输给三相直流无刷电机一6和三相直流无刷电机二4。在图5、图6和图7所示的电路中,led1通过电阻r21和发光二极管d2与gnd相接。isp模块miso引脚与芯片u4的pb4引脚相接、sck引脚与芯片u4的pb5引脚相接、mosi引脚与芯片u4的pb5引脚相接、vcc引脚与v5.0引脚相接、reset引脚接reset 1。
68.振荡电路连接在微控制器u4的pb6引脚和pb7引脚之间,pb6引脚和pb7引脚之间通过晶振y2连接,晶振y2并联电阻r20,晶振接gnd。
69.复位电路包括电容c19、电阻r15,dtr通过电容c19与reset引脚相连,5.0v端电压通过电阻r15和reset 1与reset引脚相接。
70.本发明串口下载电路和通信电路互为复用电路,在mcu处理电路调试期间通过usb接口将写好的程序烧录到mcu处理电路中。其中程序即为姿态调整程序,主要起稳定雷达的作用,先获取当前状态下雷达的俯仰角,分析与45
°
俯角之间的偏差角,然后通过电机驱动电路调整电机角度,实现姿态稳定的功能。
71.参考图8、图9和图10,串口下载电路包括三种标准接口usb-micro、usb-a、usb-type-c,一个微控制器u2;微控制器u2型号为atmega16,微控制器u2用于接收来自处理器u1的信号;三种标准接口usb-micro、usb-a、usb-type-c提供三种电源接口。
72.通信电路包括标准接口usb-a、转接芯片ch340;ch340是一个usb总线的转接芯片,用来实现usb转串口的作用;标准接口usb-a是数据通信接口。
73.在图8所示电路中,标准接口usb1为usb-micro接口,其vcc引脚通过电容c5接地;标准接口usb2为usb-a接口,其vcc引脚通过电容c6接地;标准接口usb3为usb-type-c接口,其vcc引脚通过电阻r5接v5.0。
74.在图9所示电路中,微控制器u2为atmega16u2系列芯片,其外围电路包括振荡电路、稳压电路;微控制器的ugnd引脚、pad引脚接gnd;5.0v端电压通过电阻r2和发光二极管d1与微控制器u2的pd5引脚相接,5.0v端电压通过电阻r3和发光二极管d2与微控制器u2的pd4引脚相接;reset cmd通过电阻r4与引脚pc6相接,v5.0通过电阻r6与reset引脚相接,ucap引脚通过电容c9接gnd。
75.振荡电路连接与xtal1引脚和xtal2引脚之间,xtal1引脚和xtal2引脚通过晶振y1相接,晶振y1并联电阻r1,晶振接gnd;稳压电路包括一个芯片u1ams1117、电容c1、电容c2、电容c3、电容c4;电容c2一端与5.0v端电压相接并连接到in引脚,一端接gnd,电容c2并联电容c1,电容c3一端连接out引脚输出3.3v电压,一端连接gnd,电容c3并联电容c4,adj引脚接gnd;通信电路包括标准接口usb-a、转接芯片ch340。
76.在图10所示电路中,转接芯片ch340外围电路包括电容c1、电容c2、电容c3、电容c4、电容c5、晶振y1;转接芯片ch340的v3引脚通过电容c3接gnd;vcc引脚接电源,vcc引脚通过电容c1接地;xi引脚和xo引脚通过晶振y1连接,晶振y1并联有电容c4、电容c5串联电路,晶振接gnd。
77.进一步地,本发明还可包括指示灯电路,指示灯电路用于显示sd卡是否与卡槽正常连接;卡槽位于云台主控制板下方,其槽口于云台主控制板边缘相平;在本发明的一个实施例中,指示灯电路用于指示sd卡是否正常与卡槽正常连接,当sd卡正常插入时,指示灯为绿色;反之则为红色。
78.具体如图11所示,指示灯电路包括led-rgb、电阻r16、电阻r17、电阻r19。1号线通
过电阻r16接处理器u1的pc23引脚,2号线输入5.0v电压,3号线通过电阻r17接处理器u1的pc21引脚,4号线通过电阻r19接处理器u1的pc22引脚。
79.本发明的工作流程如下:如图12所示,根据本发明,mcu处理电路上电后,首先进行系统初始化,使云台盒子处于45
°
俯角工作状态;在云台实现姿态稳定工作时,姿态采集模块将无人机飞行时微波雷达的俯仰角转换成电信号发送给mcu处理电路;mcu处理电路根据获得的信息处理完成后输出修正角度向电机驱动电路发送指令;电机驱动电路中的两个三相直流无刷电机进行角度调整,云台保持稳定的45
°
俯角;但当主控制器通过微波返回时间判断出地面存在坡度时,主控制器会解算出地面坡度,然后控制器通过输出pwm信号控制电机转动,此时无人机云台会进入新的自稳状态。
80.mcu处理电路调试期间通过usb接口将写好的程序烧录到mcu处理电路中,在装置运行期间,雷达接收回波信号并将信号无线传输给云台主控板,云台将信号传输给电脑端。
81.本发明工作原理如下:如图13所示,mpu-6050作为本发明角度信息的反馈元件,通过判断角度信息实现主控模块控制三相直流无刷电机拖动云台盒子转动,实现姿态稳定功能,mpu6050模块内集成有数字运动处理器(dmp),通过dmp可以将传感器的原始数据直接输出四元数,通过四元数的旋转矩阵变换,可以计算出欧拉角。此过程可以减轻处理器的工作负担且避免了繁琐的数据融合,运算量少,且更便于直观的感受和输出的控制;最后解算出来的欧拉角通过iic方式与主控板上的处理器u1进行数据通讯;处理器u1根据获得的信息向微控制器u4发送指令,微控制器u4向驱动芯片u2和u3发送pwm信号,驱动芯片u2和u3对接收到的脉冲信号进行处理,经放大后的信号带动三箱直流无刷电机一和三箱直流无刷电机二转动,控制两个无刷直流电机进行角度调整,从而实现云台装置的姿态保持功能,控制精度高,保持平稳。当主控制器通过微波返回时间判断出地面存在坡度时,主控制器会先解算出地面坡度角,然后控制器通过电机驱动电路输出pwm信号控制电机转动,此时无人机云台会进入新的自稳状态。
82.通过串口下载电路将写好的程序烧录到mcu处理电路中,在装置运行期间,微波雷达将接收到的回波信号无线传输给云台主控板,云台又将信号传输给电脑端,从而实现数据实时传输的功能,电脑端可以及时分析获得的信号,了解地面及土壤中的信息。
83.以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1