一种电池自动更换装置的制作方法
1.本实用新型属于无人机技术领域,具体涉及一种电池自动更换装置。
背景技术:
2.全自动无人机使用系统中,为了保证无人机的长时间续航,需要对无人机的电池进行更换。
3.申请号202021418851.5,专利名称为一种电池自动更换装置的实用新型专利,其虽然公开了两个夹持组件以夹持无人机的两块电池,但这两个夹持组件各通过一个第二移动组件驱动以取出或装载对应的电池(即采用单独驱动的方式进行控制),使得两个夹持组件的同步性较差,极难同时夹持或释放无人机的两块电池,极大地影响了无人机电池地更换效率。
技术实现要素:
4.鉴于以上现有技术的缺点,本实用新型的目的在于提供一种电池自动更换装置,其采用夹爪摆动机构控制两夹爪同时向外摆动或同时向内摆动,以实现两块电池的同时夹持或同时释放,提高电池更换效率。
5.为实现上述目的及其他相关目的,本实用新型提供一种电池自动更换装置,包括机械臂,所述机械臂包括底板、第一移动机构和夹取机构,所述第一移动机构安装在所述底板上,并驱动所述夹取机构沿前后方向移动;所述夹取机构包括两个夹持组件;每个夹持组件均包括推块、夹爪、滑动支撑板和摆动板;所述摆动板的前端通过竖直转轴转动设置在所述滑动支撑板上;所述夹爪包括夹爪臂和位于夹爪臂前端的夹爪钩,所述夹爪臂固定连接在所述摆动板上;两个滑动支撑板沿左右方向间隔设置,并共同支撑有滑动安装板;所述滑动安装板上设有驱动两个夹爪同步向外摆动或者同步向内摆动的夹爪摆动机构;所述推块固定在滑动安装板上,并与对应的夹爪配合夹持或释放电池;所述夹爪摆动机构包括第二移动机构、第二连接座和两个摆杆,所述第二移动机构安装在滑动安装板的底部,并驱动所述第二连接座沿前后方向移动;两个摆杆分别位于第二连接座的左右两侧,且摆杆的一端与第二连接座铰接,摆杆的另一端与同侧摆动板的后端铰接;通过夹爪摆动机构控制两夹爪同时向外摆动或同时向内摆动,以实现两块电池的同时夹持或同时释放,提高电池更换效率。
6.优选地,所述底板上设有两条沿前后方向延伸的第一滑轨,两个滑动支撑板通过第一滑块分别滑动设置在两条第一滑轨上;所述第一移动机构包括第一电机、第一丝杠、套设在第一丝杠上的第一丝杠螺母及第一连接座,所述第一电机通过第一电机支架安装在底板上,所述第一丝杠同轴固定在第一电机的电机轴上;所述第一连接座连接两个滑动支撑板,并与第一丝杠螺母固定连接;通过第一移动机构驱动第一连接座前后移动,进而达到调节夹取机构前后位置的目的。
7.优选地,所述底板上设有电池置放组件;所述电池置放组件包括上板、下板和立
板,所述立板固定在上板与下板之间以形成两个电池置放腔,以用于放置夹持过来的电池,避免电池在转运过程中脱落。
8.优选地,所述电池更换装置还包括升降机构和左右移动机构,所述左右移动机构驱动所述升降机构沿左右方向水平移动,所述升降机构驱动所述机械臂沿竖直方向上下移动,以便于机械臂在无人机与充电仓之间移动。
9.优选地,两条第一滑轨分别位于底板的左右两侧;所述第一电机支架、第一丝杠、第一丝杠螺母和第一连接座均位于底板下方,且第一丝杠远离第一电机的一端固定有解锁件,只需一个驱动源即可实现夹取机构位置的调节和无人机电池的解锁/固定,降低能源消耗。
10.优选地,所述第一电机支架通过第一滑块滑动设置在两条第一滑轨上;所述底板上设有第三移动机构,所述第三移动机构驱动所述电池置放组件沿前后方向移动;所述下板底部设有可转动支承所述第一丝杠的丝杠支承座,所述丝杠支承座位于解锁件后侧;所述底板上设有可避让所述丝杠支承座的底板避让槽;通过第三移动机构调节电池置放组件和解锁件的前后位置,既便于电池置放组件与电池仓对接,避免电池在拆装过程中掉落,又便于解锁件与固定旋钮对接,降低解锁定位难度。
11.优选地,所丝杠支承座与解锁件共同形成可插入无人机卡接槽内的定位件,避免无人机在电池拆装过程中移动,影响电池的顺利拆装。
12.优选地,所述底板上设有沿前后方向延伸的第三滑轨,下板通过第三滑块滑动设置在第三滑轨上;所述第三移动机构包括第三电机、第三丝杠及套设在第三丝杠上的第三丝杠螺母,所述第三电机通过第三电机支架固定在底板上,所述第三丝杠同轴固定在第三电机的电机轴上,所述第三丝杠螺母固定连接在立板的后端面上,且立板的后端面设有供第三丝杠穿过的贯穿孔;通过第三移动机构调节电池置放组件的位置,进而调节解锁件的位置,保证解锁件与无人机固定旋钮的顺利对接,完成无人机电池的解锁或固定。
13.优选地,所述滑动安装板底部设有沿前后方向延伸的第二滑轨,所述第二滑轨滑动设置有第二滑块;所述第二移动机构包括第二电机、第二丝杠及套设在第二丝杠上的第二丝杠螺母,所述第二电机通过第二电机支架固定在滑动安装板上,所述第二丝杠同轴固定在第二电机的电机轴上,所述第二连接座与第二丝杠螺母和第二滑块同时固定连接,以实现第二连接座的前后移动,进而实现两夹爪的同步向外摆动或同步向内摆动。
14.优选地,推块上设有测温元件,以检测所夹电池的温度,进而判断该电池是否需要先在周转腔中冷却,避免高温电池被直接放入充电腔中充电时发生爆炸。
15.如上,本实用新型的一种电池自动更换装置,具有以下有益效果:
16.(1)通过夹爪摆动机构实现两夹爪的同步向外摆动或同步向内摆动,达到两块电池同时夹取或同时释放的目的,提高电池更换效率;
17.(2)测温元件的设置有效避免高温电池被转运至充电腔中充电,降低电池充电时因温度过高而爆炸的可能性;
18.(3)第一移动机构采用电机丝杠装置,不仅可以调节夹取机构的位置,也能驱动解锁件转动完成无人机电池的解锁或固定,提高装置集成度;而第三移动机构的设置不仅便于电池置放组件与电池仓对接,避免电池拆装过程中掉落,而且也能进一步调节解锁件的前后位置,实现与无人机固定旋钮的准确对接。
附图说明
19.图1为本实用新型中无人机的立体图。
20.图2为本实用新型中电池自动更换装置的立体图。
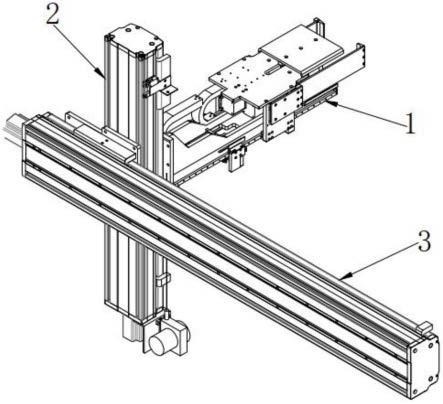
21.图3为本实用新型中机械臂的立体图。
22.图4为本实用新型中机械臂的左视图。
23.图5为本实用新型中机械臂去滑动安装板后的俯视图。
24.图6为本实用新型中推块安装在滑动安装板上的示意图(从下往上看)。
25.图7为夹取机构安装在滑动安装板上的示意图(从下往上看)。
26.图8为本实用新型中机械臂去夹取机构后的立体图。
27.附图标记说明
28.无人机01,电池仓011,电池012,固定旋钮013,卡接槽014,机械臂1,底板11,第一滑轨111,第三滑轨114,第一移动机构12,第一电机121,第一电机支架122,第一丝杠 123,第一连接座124,丝杠支承座125,夹持组件13,推块131,夹爪132,夹爪臂1321,夹爪钩1322,滑动支撑板133,摆动板134,滑动安装板135,安装板避让槽135a,第二滑轨136,第二滑块137,第一接近开关138,第二接近开关139,夹爪摆动机构14,第二连接座141,感应件1411,摆杆142,第二电机143,第二丝杠144,电池置放组件15,上板151,立板152,立板避让槽152a,下板153,解锁件16,第三移动机构17,第三电机171,第三丝杠173,机械臂安装板18,加强板19,升降机构2,左右移动机构3。
具体实施方式
29.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
30.请参阅图1至图8。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
31.如图1所示,无人机01的电池仓011为两侧开口的工字形结构,电池仓011内设置有两个电池012,电池仓011上设置有一个用于固定电池012的固定旋钮013;将固定旋钮013旋转至水平位置,可将两个电池012锁紧在电池仓011内,以防电池012掉落;当需要更换电池012时,需将固定旋钮013旋转至竖直位置,使两个电池012解锁以便于将电池012取出更换;无人机01的前端还设有卡接槽014,卡接槽014的位置低于电池仓011的位置,便于与定位件配合固定无人机01,防止无人机01移动。
32.如图2至图5所示,本实用新型提供一种电池自动更换装置,包括机械臂1,机械臂1 包括底板11、第一移动机构12和夹取机构;第一移动机构12安装在底板11上,并驱动夹取机构沿前后方向移动;夹取机构包括两个夹持组件13;每个夹持组件13均包括推块131、夹爪
位于解锁件16后侧,且丝杠支承座125与解锁件16共同形成可插入无人机01卡接槽014内的定位件,以限制无人机01的移动;所述底板11上设有可避让所述丝杠支承座125的底板避让槽;第一电机支架122通过第一滑块滑动设置在两条第一滑轨111上,且第一电机支架 122位于第一连接座124的后侧;当第三电机171带动电池置放组件15前后移动时,第一移动机构12和解锁件16随之同步前移或同步后退,降低电池仓011电池012的解锁难度和固定难度。
52.由于固定旋钮013在水平状态时具有锁紧功能,因此,需先通过驱动第三电机171使解锁件16向靠近固定旋钮013的方向移动,直至二者接触;解锁件16继续移动按压固定旋钮 013,使固定旋钮013的锁紧功能失效,接着,第一电机121启动,使固定旋钮013转动至竖直位置,完成无人机01电池012的解锁;随后,第三电机171驱动解锁件16向远离固定旋钮013的方向移动预设距离,然后,升降机构2带动整个机械臂1下移,使机械臂1上的丝杠支承座125插入无人机01上的卡接槽014内,实现无人机01的固定,避免后续插拔电池 012时,无人机01移动。
53.可以理解的是,底板11底部还设有用于感应第一电机支架122位置的第一限位开关和第二限位开关;当第一限位开关感应到第一电机支架122时,表示电池置放组件15和解锁件 16处于初始位置;当第二限位开关感应到第一电机支架122时,表示解锁件16与固定旋钮 013对接。
54.进一步地,推块131上设有测温元件,以检测所夹电池012的温度,避免高温电池被直接放入充电仓中充电引发爆炸问题。
55.当需要拆卸无人机01的电池012时,包括以下步骤:1)通过升降机构2和左右移动机构3配合调节机械臂1的位置,使机械臂1上的解锁件16与无人机01上固定旋钮013对准; 2)通过第三电机171驱动电池置放组件15前移,直至第二限位开关感应到第一电机支架122,此时,解锁件16按压固定旋钮013,并与固定旋钮013卡接配合;3)启动第一电机121使解锁件16旋转至竖直位置,完成无人机01电池012的解锁;4)通过第三电机171驱动电池置放组件15后退预设距离,解除解锁件16对固定旋钮013的按压,此时,丝杠支承座125 和解锁件16形成的定位件位于无人机01卡接槽014的正上方;5)通过升降机构2调节机械臂1的上下位置,使丝杠支承座125和解锁件16形成的定位件插入无人机01的卡接槽014 内,以限制无人机01的移动;此时,电池置放组件15与无人机01的电池仓011对接;6) 通过第一电机121驱动夹取机构前移,直至推块131与电池012的一端抵接,随后启动第二电机143,使夹爪132的夹爪钩1322向内摆动钩住电池012的另一端;7)启动第一电机121 将电池012从电池仓011中拔出并转移至电池置放组件15上:9)通过升降机构2和左右移动机构3配合调节机械臂1的位置,使机械臂1上的电池置放组件15与充电仓上空置的充电腔对接;10)启动第一电机121将电池012从电池置放组件15推出并转移至充电腔内充电。
56.当需要安装无人机01的电池012时,只需通过升降机构2和左右移动机构3配合调节机械臂1的位置,使电池置放组件15与无人机01的电池仓011对接,然后启动第一电机121 将电池012从电池置放组件15推出并转移至电池仓011内;最后,通过升降机构2、第三电机171、第一电机121配合将固定旋钮013旋转至水平位置,完成无人机01电池012的固定。
57.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行
修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1