一种倾转旋翼无人机
1.本实用新型属于无人机技术领域,具体涉及一种具有倾转翼机构的无人机。
背景技术:
2.现有垂直起降固定翼无人机的布局多数为4+1布局,直接将四旋翼无人机动力结构组合在固定翼无人机上,在多旋翼模式切换为固定翼模式后,垂直起降动力组不参与机体运行,这种布局造成动力设计浪费,且整机的成本较高。
3.现有垂直起降固定翼无人机的布局部分使用前置两轴倾转的机型,其使用的倾转机构为舵机直驱结构,即舵机连接座直接安装无刷电机进行倾转作业,这种设计将无刷电机产生的扭力与推进力直接作用于舵机上,造成舵机损耗严重,极大减小了舵机的寿命。
4.现有垂直起降固定翼无人机起降过程中,机翼保持固定翼布局,使得机体所受阻力增加,起降效率较低。
技术实现要素:
5.为解决现有技术存在的技术问题,本实用新型提供了一种倾转翼无人机,该无人机有效结合多旋翼无人机和固定翼无人机,集两种无人机的优势性能,以适应复杂的工作环境。
6.为实现上述目的,本实用新型所采用的技术方案为:一种倾转旋翼无人机,包括机体,机体的前端布置有设备舱,机体的尾端布置由两块尾翼,两块尾翼对称布置,机体的底部设有任务载荷投放口,机体的两侧对称设有固定机翼,机体的尾端底部装有升降电机,升降电机的输出轴与升降螺旋桨相连,升降螺旋桨水平布置。
7.固定机翼上装有机体连杆,机体连杆的一端通过轴承支撑在固定机翼的一侧,机体连杆的另一端通过轴承支撑在固定机翼的另一侧,机体连杆的两端轴承能够保证机体连杆的运行稳定性。
8.固定机翼上固定有舵机固定座,舵机固定座内装有倾转舵机,倾转舵机的输出轴两端均延伸至舵机固定座的外部,倾转舵机输出轴的一端装有第一主动同步带轮,第一主动同步带轮与倾转舵机输出轴同步转动,机体连杆上固定有第一从动同步带轮,第一主动同步带轮与第一从动同步带轮之间通过第一同步带相连,倾转舵机输出轴的另一端装有第二主动同步带轮,第二主动同步带轮与倾转舵机输出轴同步转动,机体连杆上固定有第二从动同步带轮,第二主动同步带轮与第二从动同步带轮之间通过第二同步带相连。
9.倾转舵机工作,第一主动同步带轮与第二主动同步带轮同步转动,在第一同步带的作用下,第一主动同步带轮带动第一从动同步带轮转动,在第二同步带的作用下,第二主动同步带轮带动第二从动同步带轮转动,进而实现机体连杆的转动,机体连杆的外延端与倾转机翼固定,机体连杆带动倾转机翼转动,进而改变倾转机翼相对于固定机翼的倾斜角度。
10.倾转机翼的前端装有倾转电机,倾转电机的输出轴与倾转螺旋桨相连,倾转电机
驱动倾转螺旋桨转动;倾转机翼与固定机翼完全齐平齐平后,倾转螺旋桨竖直布置;倾转机翼相对于固定机翼向上翻转90度后,倾转螺旋桨水平布置。
11.其中,作为优选的,第一主动同步带轮通过法兰联轴器与倾转舵机的输出轴相连,第二主动同步带轮通过法兰联轴器与倾转舵机的输出轴相连。
12.机体连杆上固定有第一法兰轴承,第一法兰轴承置于第一从动同步带轮的外侧,机体连杆通过第一法兰轴承支撑在固定机翼上,保证机体连杆的稳定性。
13.机体连杆上固定有第二法兰轴承,第二法兰轴承置于第二从动同步带轮的外侧,机体连杆通过第二法兰轴承支撑在固定机翼上,保证机体连杆的稳定性。
14.本实用新型与现有技术相比,具体有益效果体现在:
15.一、本实用新型采用2+1布局,即两个前置倾转螺旋桨与尾部一部固定升力螺旋桨的组合布局,两个前置倾转螺旋桨作为垂直起降模式与固定翼飞行模式的动力源,无需额外增加电机,动力配置少,结构简洁,成本低。
16.二、倾转机构采用舵机驱动同步带轮组的结构,通过同步带驱动倾转机翼的倾斜角度,实现无人机垂直起降模式与固定翼模式的切换工作,前置两部倾转电机固定于倾转机翼上,将无刷电机产生的推力和扭力转至机翼-机体连接处,舵机只需承受同步带的扭力,提高了舵机寿命;机翼整体倾转减小无人机起降过程中机翼产生的空气阻力,提高了起降效率。
17.三、本实用新型有效结合多旋翼无人机的垂直起降能力和固定翼无人机的高效巡航能力,可适应多种工作环境,可广泛应用在边防、军事侦查、输油输电管线检测、复杂空域快速投送、航拍测绘等技术领域。
附图说明
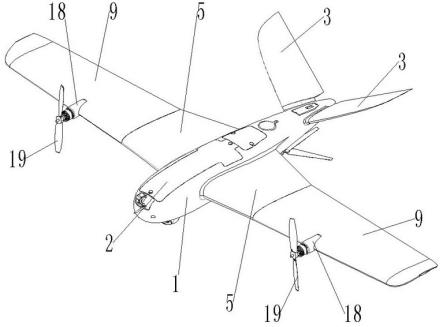
18.图1为本实用新型的结构示意图一,也是无人机水平飞行时的状态示意图。
19.图2为本实用新型的结构示意图二。
20.图3为本实用新型隐藏固定机翼外壳后的内部连接示意图。
21.图4为图3中a处的局部放大图。
22.图5为倾转机翼相对于固定机翼翻转90后的结构示意图,也是无人机起降作业时的状态示意图。
23.图中,1为机体,2为设备舱,3为尾翼,4为任务载荷投放口,5为固定机翼,6为升降电机,7为升降螺旋桨,8为机体连杆,9为倾转机翼,10为舵机固定座,11为倾转舵机,12为第一主动同步带轮,13为第一从动同步带轮,14为第一同步带,15为第二主动同步带轮,16为第二从动同步带轮,17为第二同步带,18为倾转电机,19为倾转螺旋桨,20为法兰联轴器,21为第一法兰轴承,22为第二法兰轴承。
具体实施方式
24.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
25.如图1-5所示,一种倾转旋翼无人机,包括机体1,机体1的前端布置有设备舱2,机
体1的尾端布置由两块尾翼3,两块尾翼3对称布置,机体1的底部设有任务载荷投放口4,机体的两侧对称设有固定机翼5,机体的尾端底部装有升降电机6,升降电机6的输出轴与升降螺旋桨7相连,升降螺旋桨7水平布置。
26.固定机翼5上装有机体连杆8,机体连杆8的一端通过轴承支撑在固定机翼5的一侧,机体连杆8的另一端通过轴承支撑在固定机翼5的另一侧,机体连杆8的两端轴承能够保证机体连杆8的运行稳定性。
27.固定机翼5上固定有舵机固定座10,舵机固定座10内装有倾转舵机11,倾转舵机11的输出轴两端均延伸至舵机固定座10的外部,倾转舵机11输出轴的一端装有第一主动同步带轮12,机体连杆8上固定有第一从动同步带轮13,第一主动同步带轮12与第一从动同步带轮13之间通过第一同步带14相连,第一主动同步带轮12与第一从动同步带轮13同步转动;倾转舵机11输出轴的另一端装有第二主动同步带轮15,机体连杆8上固定有第二从动同步带轮16,第二主动同步带轮15与第二从动同步带轮16之间通过第二同步带17相连,第二主动同步带轮15与第二从动同步带轮16同步转动。
28.倾转舵机11工作,第一主动同步带轮12与第二主动同步带轮15同步转动,在第一同步带14的作用下,第一主动同步带轮12带动第一从动同步带轮13转动,在第二同步带17的作用下,第二主动同步带轮15带动第二从动同步带轮16转动,进而实现机体连杆8的转动,机体连杆8的外延端与倾转机翼9固定,机体连杆8带动倾转机翼9转动,进而改变倾转机翼9相对于固定机翼5的倾斜角度。
29.倾转机翼9的前端装有倾转电机18,倾转电机18的输出轴与倾转螺旋桨19相连,倾转电机18驱动倾转螺旋桨19转动;倾转机翼9与固定机翼5完全齐平齐平后,倾转螺旋桨19竖直布置;倾转机翼9相对于固定机翼5倾斜90度后,倾转螺旋桨19水平布置。
30.其中,作为优选的,第一主动同步带轮12通过法兰联轴器20与倾转舵机11的输出轴相连,第二主动同步带轮15通过法兰联轴器20与倾转舵机11的输出轴相连。
31.机体连杆8上固定有第一法兰轴承21,第一法兰轴承21置于第一从动同步带轮13的外侧,机体连杆8通过第一法兰轴承21支撑在固定机翼5上,保证机体连杆8的稳定性。
32.机体连杆8上固定有第二法兰轴承22,第二法兰轴承22置于第二从动同步带轮16的外侧,机体连杆8通过第二法兰轴承22支撑在固定机翼5上,保证机体连杆8的稳定性。
33.无人机的机翼—机体1连接处使用高强度碳纤维管材与承力轴承的组合,承受无刷电机产生的推力与扭力,保护舵机。
34.本无人机采用2+1的动力布局,在无人机的前端布置两个前置倾转螺旋桨19,在无人机的尾部布置升降螺旋桨7。无人机进行起降作业时,使用多旋翼模式,倾转舵机11工作,两条同步带带动各自倾转机翼9相对于固定机翼5转动90度,两个倾转机翼9上的倾转电机18转换为中轴线竖直状态,配合升降电机6进行起降作业。达到安全高度后,无人机在多旋翼模式下进行水平前进飞行。当速度达到飞行要求时,倾转舵机11工作,两条同步带带动各自倾转机翼9相对于固定机翼5反向转动90度,倾转机翼9与固定机翼5齐平,两侧倾转机翼9上的倾转电机18进行线性角度变换至中轴线水平状态,关闭升降电机6,无人机转换为固定翼模式进行飞行作业。
35.本无人机在固定翼的基础上,垂直起降固定翼无人机结合了多旋翼可垂直起降的优势,大大降低了固定翼起飞和降落场地的限制,本无人机采用独立的起飞系统以提供升
空动力,达到起飞高度后,借助副翼、襟翼引导气流流向,尾推发动机开始工作,变换为无人机飞行方式。在无人机的工作过程中,倾转舵机11只需承受同步带的扭力,提高了舵机寿命;机翼整体倾转减小无人机起降过程中机翼产生的空气阻力,提高了起降效率。
36.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包在本实用新型范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1