一种用于隧道巡检的无人机装置的制作方法
1.本实用新型涉及无人机技术领域,具体涉及一种用于隧道巡检的无人机装置。
背景技术:
2.隧道是埋置于地层内的工程建筑物,是人类利用地下空间的一种形式。随着时间的推移,隧道受外部环境、地质条件、设计、施工、管理及周边建筑施工等多种方面的影响,会出现裂缝、渗漏、掉块等病害现象,不仅严重威胁到隧道的正常、安全使用,而且使得隧道内部环境具有复杂性和危险性,掉块施工产生的遗留物如没有被及时发现以及清理,对隧道内的交通安全造成隐患,严重时可能会导致交通事故的发生。
3.目前,由于隧道内部的巡检工作主要以人工巡检为主,需要消耗较大的人力物力,部分巡检任务的耗时长,会对隧道内的运营通车造成延误。近年来,飞行控制技术的发展使得无人机的操控变得简单易行,搭载传感器的无人机能够在一些已知的环境中进行简单的信息监测类巡检任务。但随着隧道巡检工作向着复杂性、多样性方向的发展,巡检工作往往同时伴随物品清理以及物品运输、隧道壁面裂缝渗漏监测、隧道结构形变监测等多项任务,现有搭载传感器的巡检无人机难以满足当前的巡检工作需求。
技术实现要素:
4.为解决现有技术技术存在的问题,本实用新型提供一种用于隧道巡检的无人机装置,该无人机装置搭载传感器、多自由度操作臂以及三指柔性夹爪,能够实现隧道的状态监测,及时发现隧道内异常状态并且能够提供较大的负载能力,实现巡检时的物品清理以及运输。
5.本实用新型的技术方案如下:
6.一种用于隧道巡检的无人机装置,包括无人机机架、旋翼、支座、多自由度操作臂、三指柔性夹爪、视觉传感器、三维激光雷达和主控单元;所述旋翼周向均布地连接在无人机机架上,形成无人机单元;所述支座连接在无人机机架的上端,三维激光雷达连接在支座上端的中心位置并处于无人机单元最高位置上,视觉传感器对称设置在支座上;所述多自由度操作臂上端连接于无人机机架下端的中心位置上、下端连接三指柔性夹爪。
7.进一步地,所述视觉传感器设有两组或多组,两组时视觉传感器对称连接在支座的两侧;多组时视觉传感器周向均布地连接支座侧壁。
8.进一步地,所述多自由度操作臂为五自由度操作臂。
9.进一步地,所述五自由度操作臂包括安装底座、第一关节伺服电机、第一短u形连接件、第二关节伺服电机、第一长u形连接件、第一碳纤维连杆、第二短u形连接件、第三关节伺服电机、第二长u形连接件、第二碳纤维连杆、第三长u形连接件、第四关节伺服电机、固定连接板和第五关节伺服电机。
10.进一步地,所述安装底座固定在无人机机架下端的中心位置;所述第一关节伺服电机的固定端固定连接在安装底座上,第一关节伺服电机的输出轴连接第一短u形连接件
的开口端,所述第一短u形连接件的底端与所述第二关节伺服电机的固定端固定连接,所述第二关节伺服电机的输出轴连接第一长u形连接件的开口端,所述第一长u形连接件的底端与所述第一碳纤维连杆的一端固定连接,第一碳纤维连杆的另外一端与第二短u形连接件的底端固定连接,所述第二短u形连接件的开口端固定连接所述第三关节伺服电机的底端;所述第三关节伺服电机的输出轴连接所述第二长u形连接件的开口端,所述第二长u形连接件的底端与第二碳纤维连杆的一端固定连接,第二碳纤维连杆的另外一端与第三长u形连接件的底端固定连接,所述第四关节伺服电机的输出轴连接所述第三长u形连接件的开口端;所述第四关节伺服电机的固定端与第五关节伺服电机的固定端通过固定连接板固定连接;所述第五关节伺服电机的输出轴连接所述三指柔性夹爪。
11.进一步地,所述无人机机架包括上中心固定板、下中心固定板、侧板和两个支架机构;所述侧板插接在上中心固定板和下中心固定板之间,并通过螺丝固定连接;所述两个支架机构对称设置在所述下中学固定板的下端。
12.进一步地,所述旋翼设有六个,该六个旋翼周向均布地连接在上中心固定板和下中心固定板周侧。
13.进一步地,所述旋翼包括支撑轴、左安装板、右安装板、旋翼连杆、无刷电机、螺旋桨、上安装板、下安装板和支撑块;其中,左安装板和右安装板固定安装在旋翼连杆的左右两侧,并利用支撑轴支撑开;左安装板和右安装板插接在上中心固定板和下中心固定板之间,并通过螺丝固定连接;无刷电机的输出轴与螺旋桨固定连接,无刷电机固定在上安装板上,上安装板和下安装板通过支撑块将旋翼连杆夹在中间,并通过螺丝固定连接。
14.进一步地,所述三指柔性夹爪包括夹爪连接板、驱动电机、驱动盘、固定支架和三个柔性夹指;该三个柔性夹指采用相同结构并以一百二十度的角度间隔分布在固定支架周围;所述柔性夹指包括驱动连杆、刚性夹指基座和柔性手指;所述柔性手指采用橡胶材料制成;所述刚性夹指基座和柔性手指固定连接;夹爪连接板的下侧与五自由度操作臂的第五关节伺服电机的输出轴连接,另一侧与驱动电机的底侧固定连接,驱动电机的输出轴为丝杆机构,丝杆机构穿过驱动盘中心,驱动电机的旋转控制驱动盘上下移动,刚性夹指基座外侧与所述固定支架铰接,内侧通过驱动连杆与所述驱动盘铰接。
15.本实用新型具有以下有益效果:
16.一、本实用新型提供一种用于隧道巡检的无人机装置,该无人机装置中的视觉传感器可以获取隧道壁面的裂缝以及路面上的遗留物信息,能够及时处治漏水问题;三维激光雷达可以对隧道内部进行三维建模,分析隧道是否发生结构形变;多自由度操作臂以及三指柔性夹爪,可以在巡检时对隧道道路上的遗留物进行清理以及运输,去除因遗留物产生的交通隐患。同时该无人机装置中的三指柔性夹爪具有稳定的抓取功能,能够适用于不同的物体形状。
17.二、本实用新型无人机装置的结构紧凑,具有稳定的运动性能,六组旋翼能够提供较大的负载,五自由度操作臂的设计可以实现物体的多自由度操作,能够满足隧道巡检工作中的多种任务需求。
18.三、本实用新型无人机装置的五自由度操作臂分别通过碳纤维连杆将第二关节伺服电机与第三关节伺服电机、第三关节伺服电机与第四关节伺服电机相连接,实现了无人机装置的轻量化设计;同时,相比于现有无人机在飞行过程中需要通过增设配重,来调节重
心保持稳定,本实用新型无人机装置的多自由度操作臂可在飞行过程中处于收缩状态,能够降低无人机装置的惯性作用,使得本实用新型的无人机装置具有更好的飞行稳定性。
附图说明
19.通过参照附图的本实用新型的优选的非限制性实施方式的详细说明,本实用新型的所述的及其他的特征将变得更加清楚,其中:
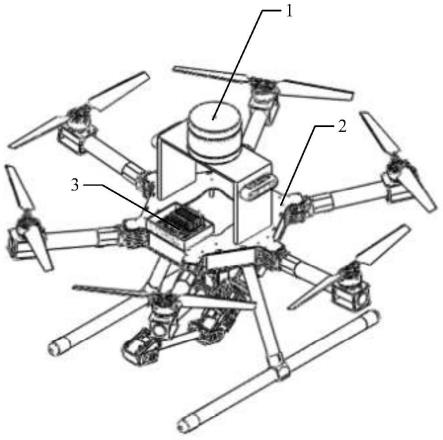
20.图1为无人机装置的三维结构示意图;
21.图2为无人机装置的五自由度可操作臂收起示意图;
22.图3为无人机装置的五自由度可操作臂伸展示意图;
23.图4为无人机装置的中心固定板结构示意图;
24.图5为无人机单元的俯视示意图;
25.图6为无人机装置的旋翼的结构示意图;
26.图7为无人机装置的五自由度操作臂结构示意图;
27.图8为无人机装置的三指柔性夹爪张开状态示意图;
28.图9为无人机装置的三指柔性夹爪闭合状态示意图。
29.图10为无人机装置的感知模块结构示意图。
30.图11为短u形连接件的三维结构示意图;
31.图12为长u形连接件的三维结构示意图;
32.其中,1-感知模块;2-无人机单元;3-主控单元;4-五自由度操作臂;5-三指柔性夹爪;101-上中心固定板;102-下中心固定板;103-第一侧板;104-第二侧板;105-第三侧板;106-第四侧板;107-第五侧板;108-第六侧板;109-第一旋翼;110第二旋翼;111-第三旋翼;112-第四旋翼;113-第五旋翼;114-第六旋翼;115-第一支架;116-第二支架;201-安装底座;202-第一关节伺服电机;203-第一短u形连接件;204-第二关节伺服电机;205-第一长u形连接件;206-第一碳纤维连杆;207-第二短u形连接件;208-第三关节伺服电机;209-第二长u形连接件;210-第二碳纤维连杆;211-第三长u形连接件;212-第四关节伺服电机;213-固定连接板;214-第五关节伺服电机;301-支撑轴;302-左安装板;303-右安装板;304-旋翼连杆;305-无刷电机;306-螺旋桨;307-上安装板;308-支撑块;309-下安装板;401-夹爪连接板;402-驱动电机;403-驱动盘;404-固定支架;405-第一柔性夹指;406-第二柔性夹指;407-第三柔性夹指;408-驱动连杆;409-刚性夹指基座;410-柔性手指;501-u型支座;502-右侧视觉传感器;503-左侧视觉传感器;504-三维激光雷达。
具体实施方式
33.下面结合具体实施例及对应附图对本实用新型作进一步说明。
34.实施例一:
35.一种用于隧道巡检的无人机装置,包括无人机机架、六个旋翼、支座、五自由度操作臂、三指柔性夹爪、两组或多组视觉传感器、三维激光雷达和主控单元;六个旋翼周向均布地连接在无人机机架上,形成无人机单元;支座连接在无人机机架的上端,三维激光雷达连接在支座上端的中心位置并处于无人机单元最高位置上,视觉传感器对称设置在支座上;当设有两组视觉传感器时,该两组视觉传感器对称连接在支座的两侧;当设有多组视觉
传感器时,多组视觉传感器周向均布地连接支座侧壁;五自由度操作臂上端连接于无人机机架下端的中心位置上、下端连接三指柔性夹爪。
36.其中,无人机机架包括上中心固定板、下中心固定板、侧板和两个支架机构;所述侧板插接在上中心固定板和下中心固定板之间,并通过螺丝固定连接;所述两个支架机构对称设置在所述下中学固定板的下端。
37.六个旋翼周向均布地连接在上中心固定板和下中心固定板周侧。该六个旋翼采用相同结构,旋翼包括支撑轴、左安装板、右安装板、旋翼连杆、无刷电机、螺旋桨、上安装板、下安装板和支撑块;其中,左安装板和右安装板固定安装在旋翼连杆的左右两侧,并利用支撑轴支撑开;左安装板和右安装板插接在上中心固定板和下中心固定板之间,并通过螺丝固定连接;无刷电机的输出轴与螺旋桨固定连接,无刷电机固定在上安装板上,上安装板和下安装板通过支撑块将旋翼连杆夹在中间,并通过螺丝固定连接。
38.五自由度操作臂包括安装底座201、第一关节伺服电机202、第一短u形连接件203、第二关节伺服电机204、第一长u形连接件205、第一碳纤维连杆206、第二短u形连接件207、第三关节伺服电机208、第二长u形连接件209、第二碳纤维连杆210、第三长u形连接件211、第四关节伺服电机212、固定连接板213和第五关节伺服电机214。其中,短u形连接件以及长u形连接件的三维结构示意图如图11和图12所示,由图11和图12可知,短u形连接件以及长u形连接件均采用u型开口结构,长u形连接件的长度大于短u形连接件。
39.安装底座201固定在无人机机架下端的中心位置,并与所述下中心固定板102固定连接;所述第一关节伺服电机202的固定端固定连接在安装底座201上,第一关节伺服电机202的输出轴连接第一短u形连接件203的开口端,所述第一短u形连接件203的底端与所述第二关节伺服电机204的固定端固定连接,所述第二关节伺服电机204的输出轴连接第一长u形连接件205的开口端,所述第一长u形连接件205的底端与所述第一碳纤维连杆206的一端固定连接,第一碳纤维连杆206的另外一端与第二短u形连接件207的底端固定连接,所述第二短u形连接件207的开口端固定连接所述第三关节伺服电机208的底端;所述第三关节伺服电机208的输出轴连接所述第二长u形连接件209的开口端,所述第二长u形连接件209的底端与第二碳纤维连杆210的一端固定连接,第二碳纤维连杆210的另外一端与第三长u形连接件211的底端固定连接,所述第四关节伺服电机212的输出轴连接所述第三长u形连接件211的开口端;第四关节伺服电机212的固定端与第五关节伺服电机214的固定端通过固定连接板213固定连接;所述第五关节伺服电机214的输出轴连接所述三指柔性夹爪。
40.三指柔性夹爪主要包含夹爪连接板401、驱动电机402、驱动盘403、固定支架404和三个柔性夹指;该三个柔性夹指采用相同结构并以120度的角度间隔分布在固定支架404周围;该柔性夹指包括驱动连杆408、刚性夹指基座409和柔性手指410;其中,柔性手指410采用橡胶材料制成;刚性夹指基座409和柔性手指410固定连接;夹爪连接板401的下侧与五自由度操作臂的第五关节伺服电机214的输出轴连接,另一侧与驱动电机402的底侧固定连接,驱动电机402的输出轴为丝杆机构,丝杆机构穿过驱动盘403中心,驱动电机402的旋转可以控制驱动盘403上下移动。刚性夹指基座外侧与所述固定支架铰接,内侧通过驱动连杆与所述驱动盘铰接。
41.实施例二:
42.如图1、图2和图3所示,本实施例的用于隧道巡检的无人机装置包括感知模块1、无
人机单元2、主控单元3、五自由度操作臂4以及三指柔性夹爪5以及一个u型支座。其中,无人机单元包括无人机机架以及设置在无人机机架上的六个旋翼,相比与四旋翼设计,设有六个旋翼的无人机单元2具有更稳定的飞行性能,同时也能够提供足够的上升力,具备更好的负载能力。五自由度操作臂4通过螺丝固定安装在无人机单元2的底侧中心部位,五自由度操作臂4在无人机单元2飞行过程中处于收缩状态,降低惯性作用,使得无人机装置具有更好的飞行稳定性。三指柔性夹爪5通过螺丝固定安装在五自由度操作臂4的末端,能够提供较好地抓取性能,并且三指柔性夹爪5具有较好地物体适应性,能够抓取不同外形的物体。
43.如图1和图10所示,感知模块1包含固定安装在u型支座501左、右两侧的左侧视觉传感器503以及右侧视觉传感器502、固定安装在u型支座501顶侧的三维激光雷达504。u型支座501固定安装在无人机单元2上端。通过三维激光雷达504、右侧视觉传感器502、左侧视觉传感器503可以检测隧道的三维形状以及墙面的裂缝等信息。
44.如图4、图5和图6所示,无人机单元2主要包含上中心固定板101、下中心固定板102、第一侧板103、第二侧板104、第三侧板105、第四侧板106、第五侧板107、第六侧板108、第一旋翼109、第二旋翼110、第三旋翼111、第四旋翼112、第五旋翼113、第六旋翼114、第一支架115和第二支架116。第一支架115和第二支架116用于无人机单元2停放在地面时的支撑作用。第一支架115和第二支架116的高度能够满足五自由度操作臂4完全收缩的状态,此时无人机单元2能够通过第一支架115和第二支架116实现支撑,降落在指定平面上。其中六个侧板插接在上中心固定板101和下中心固定板102之间,并通过螺丝固定安装。六个旋翼机构具有相同的结构,以第一旋翼109为例,主要包含支撑轴301、左安装板302、右安装板303、旋翼连杆304、无刷电机305、螺旋桨306、上安装板307、下安装板309和支撑块308。左安装板302和右安装板303固定安装在旋翼连杆304的左右两侧,并利用支撑轴301支撑开。左安装板302和右安装板303插接在上中心固定板101和下中心固定板102之间,并通过螺丝固定连接。无刷电机305的输出轴与螺旋桨306固定连接,无刷电机305固定在上安装板307上,上安装板307和下安装板309通过支撑块308将旋翼连杆304夹在中间,并通过螺丝固定连接。六个旋翼能够提供足够的上升力,具有较好的负载能力。
45.如图7所示,五自由度操作臂4主要包含安装底座201、第一关节伺服电机202、第一短u形连接件203、第二关节伺服电机204、第一长u形连接件205、第一碳纤维连杆206、第二短u形连接件207、第三关节伺服电机208、第二长u形连接件209、第二碳纤维连杆210、第三长u形连接件211、第四关节伺服电机212、固定连接板213和第五关节伺服电机214。安装底座201固定在无人机机架下端的中心位置;第一关节伺服电机202的固定端固定连接在安装底座201上,第一关节伺服电机202的输出轴连接第一短u形连接件203的开口端,第一短u形连接件203的底端与第二关节伺服电机204的固定端固定连接,第二关节伺服电机204的输出轴连接第一长u形连接件205的开口端,第一长u形连接件205的底端与第一碳纤维连杆206的一端固定连接,第一碳纤维连杆206的另外一端与第二短u形连接件207的底端固定连接,第二短u形连接件207的开口端固定连接第三关节伺服电机208的底端;第三关节伺服电机208的输出轴连接第二长u形连接件209的开口端,第二长u形连接件209的底端与第二碳纤维连杆210的一端固定连接,第二碳纤维连杆210的另外一端与第三长u形连接件211的底端固定连接,第四关节伺服电机212的输出轴连接第三长u形连接件211的开口端;第四关节伺服电机212的固定端与第五关节伺服电机214的固定端通过固定连接板213固定连接;第
五关节伺服电机214的输出轴连接三指柔性夹爪。从而构建了从安装底座201到第五关节伺服电机214的串联结构。五自由度操作臂4能够实现对物体的空间操作。
46.如图7、图8何图9所示,三指柔性夹爪5主要包含夹爪连接板401、驱动电机402、驱动盘403、固定支架404和第一柔性夹指405、第二柔性夹指406、第三柔性夹指407。三个柔性夹指以120度的角度间隔分布在固定支架404周围。三个柔性夹指具有相同的结构,以第三柔性夹指407为例,主要包含驱动连杆408、刚性夹指基座409和柔性手指410三个部分。柔性手指410采用橡胶材料,能够较好地适用物体的表面形状,提供较好的包裹性。
47.刚性夹指基座409和柔性手指410固定连接。夹爪连接板401的下侧与五自由度操作臂固定连接,连接在第五关节伺服电机214的输出轴上,另外一侧与驱动电机402的底侧固定连接,驱动电机402的输出轴为丝杆机构,丝杆机构穿过驱动盘403中心,驱动电机402的旋转可以控制驱动盘403上下移动。驱动盘403的周围设有三个以120度的角度间隔的凸台,驱动连杆408通过旋转轴固定在凸台的圆孔中。驱动连杆408的另外一端与刚性夹指基座409的右侧通过旋转轴固定连接,固定支架404的周围分布三个立起的凸台,凸台与刚性夹指基座409的左侧旋转轴固定连接。当驱动电机402正向旋转时,驱动盘403向上移动,三个柔性夹指张开;当驱动电机402反向旋转时,驱动盘403向下移动,三个柔性夹指闭合,从而实现物体的抓取操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1