一种飞机操纵系统变传动比装置的制作方法
1.本技术属于飞控系统设计技术领域,特别涉及一种飞机操纵系统变传动比装置。
背景技术:
2.在当前飞机设计领域,电传飞行控制行是飞机飞行控制系统发展的主流,一般电传飞行控制系统都是通过配置余度配置和多种模态切换和降级确保飞行安全的。但是考虑到电传飞行控制系统对电源系统的依赖以及极端电磁或特殊粒子的环境下,电传飞行控制系统有时会考虑使用机械操纵系统作为飞行控制系统的应急系统。常规的电传与机械操纵系统配合一般是通过电作动器和机械操纵机构之间设置离合器,通过离合器的通断实现电传指令和机械位移指令的切换。但离合器的使用会使得飞行控制系统的指令选择受到离合器故障的影响。
3.在公告号为cn105523171b,申请人为中国航空工业集团公司西安飞机设计研究所申请的“一种大飞机混合式横向操纵系统”专利中公开了一种电传飞行控制系统与机械备份系统的的混合式横向操纵系统,其中描述了一种通过电传/机械转换开关控制一种类似于汽车变速箱的装置实现传动比变换功能,同时在公告号为cn105526324b,申请人同为中国航空工业集团公司西安飞机设计研究所申请的“一种力、位移无级可调输出装置”专利中公开了一种传动比变换和输出装置。综合研究公开的两项技术,可以得出此两种技术的结合,可以实现飞行控制系统电传模态与机械模态的转换,但仍需解决的问题在于:1)所述机械备份系统与电传飞行控制系统是实时联动的,电传飞行控制系统有效时,机械备份系统仍然处于半传动比状态随动,机械操纵系统的传动机构的运动对驾驶员来讲是一种负担和虑耗;2)所述机械备份系统在大传动比和小传动比模态的切换过程中,会产生非期望的舵面操纵指令。
4.对此,可以明确的是,研究出一种新型可变传动比的应急操纵系统是迫切的,进一步使飞机的机械操纵系统在正常情况下处于静默状态是必要的,同时在传动比变换的过程中不产生非期望的指令,也是非常有利于电传飞行控制系统和机械操纵系统协调共存的。
技术实现要素:
5.为了解决上述技术问题至少之一,本技术设计了一种飞机操纵系统变传动比装置,用于在在机械应急模态下提供适应飞机高速和低速飞行的合适的传动比转换。
6.本技术提供的飞机操纵系统变传动比装置,主要包括输入摇臂、输入连杆、变模态摇臂、输出连杆及输出摇臂,输入摇臂包含固定连接并呈角度的输入驱动端和输入从动端,输出摇臂包含固定连接且呈角度的输出驱动端和输出从动端,输入驱动端与输入从动端的连接点,以及输出驱动端与输出从动端的连接点共轴转动安装在第一转轴上,变模态摇臂包含从动臂、变臂滑槽、侧支臂、柔性芯杆、芯杆转盘及变臂电机,芯杆转盘的边缘上设定一变臂中心,从动臂与变臂滑槽分别设置于变臂中心的两侧,侧支臂、从动臂及芯杆转盘的一条半径组合成三角形;变臂电机与芯杆转盘共轴安装于侧支臂上,其中变臂电机的壳体端
与侧支臂固连,变臂电机的驱动端与芯杆转盘固连;柔性芯杆绕于芯杆转盘上,其一端固定于芯杆转盘上,另一端穿入变臂滑槽内,变模态摇臂的变臂中心位于第二转轴上,从动臂与变臂滑槽绕所述第二转轴转动,输入摇臂的输入从动端通过输入连杆与变模态摇臂的从动臂相连,输出连杆的一端与柔性芯杆的穿入变臂滑槽的一端端头相连,输出连杆的另一端与输出摇臂的输出驱动端相连。
7.优选的是,所述第一转轴与第二转轴的间距、输入连杆的长度、输出连杆的长度是相等的,所述输入摇臂的输入从动端的长度与变模态摇臂的从动臂的臂长相等。
8.优选的是,所述变模态摇臂的变臂滑槽为圆弧形滑槽,并且在输入摇臂处于初始位置时变臂滑槽的圆心与输出摇臂的输出驱动端的起始端头重合,所述起始端头为所述输出驱动端与输出连杆连接的一端。
9.优选的是,所述变臂滑槽的中心轴线穿过所述变臂中心。
10.优选的是,所述变臂滑槽靠近变臂中心的一端与变臂中心重合。
11.优选的是,所述侧支臂具有两个支撑板,所述变臂电机及芯杆转盘安装于侧支臂的两个支撑板之间,所述变臂电机的壳体端与侧支臂一侧的一个支撑板相连。
12.优选的是,飞机操纵系统变传动比装置还包括传动比变换开关,连接所述变臂电机,用于控制变臂电机转动,变臂电机带动芯杆转盘运动,改变柔性芯杆在变臂滑槽内的一端端头的位置,从而改变变模态摇臂的输出臂长,所述输出臂长是指柔性芯杆的变臂滑槽内的一端端头到第二转轴之间的距离。
13.优选的是,飞机操纵系统变传动比装置还包括全传动比电门、半传动比电门和零输出电门,全传动比电门设置于变臂滑槽的外伸端端头处,半传动比电门位于变臂滑槽中部处,零输出电门位于变臂滑槽靠近变臂中心的一端,三组电门能够被柔性芯杆在变臂滑槽内的端头靠近触发。
14.优选的是,所述全传动比电门、半传动比电门和零输出电门均为磁性敏感电门,柔性芯杆在变臂滑槽内的端头为导磁性材料,三组电门能够被柔性芯杆在变臂滑槽内的端头非接触触发。
15.优选的是,所述传动比变换开关包括全传动比、半传动比、零输出三个位置,通过开关的选择控制变臂电机的运动,带动芯杆转盘运动,进一步带动柔性芯杆在变臂滑槽内端头触发全传动比电门、半传动比电门和零输出电门,使变臂电机停止于在传动比变换开关指令的位置。
16.本技术结构简单,功能完整,集成化成度高,重量轻,具有很高的专业应用价值,同时作为静默机械接入装置,可以在主备式的机械控制系统中进行推广,在交通工具、大型机械的教练-学员的带教方面进行技术移植。
附图说明
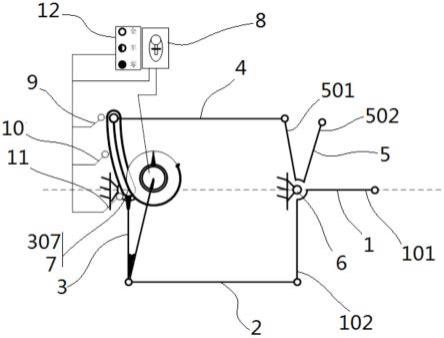
17.图1是本技术飞机操纵系统变传动比装置的一实施方式的结构示意图。
18.图2是本技术图1所示实施例的变模态摇臂结构示意图。
19.图3是本技术图1所示实施例的变模态摇臂的侧支臂与变臂电机连接示意图。
20.其中:1-输入摇臂;2-输入连杆;3-变模态摇臂;4-输出连杆;5-输出摇臂;6-第一转轴;7-第二转轴;8-传动比变换开关;9-全传动比电门; 10-半传动比变门;11-零输出电
门;12-传动比指示器;101-输入驱动端; 102-输入从动端;501-输出驱动端;502-输出从动端,301-从动臂;302
‑ꢀ
变臂滑槽、303-侧支臂;304-柔性芯杆;305-芯杆转盘;306-变臂电机; 307-变臂中心;361-变臂电机的壳体端;362-变臂电机的驱动端。
具体实施方式
21.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。下面通过参考附图描述的实施方式是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。下面结合附图对本技术的实施方式进行详细说明。
22.本技术提供了一种飞机操纵系统变传动比装置,如图1所示,主要包括:输入摇臂1、输入连杆2、变模态摇臂3、输出连杆4及输出摇臂5,输入摇臂1包含固定连接并呈角度的输入驱动端101和输入从动端102,输出摇臂5包含固定连接且呈角度的输出驱动端501和输出从动端502,输入驱动端101与输入从动端102的连接点,以及输出驱动端501与输出从动端 502的连接点共轴转动安装在第一转轴6上,变模态摇臂3包含从动臂301、变臂滑槽302、侧支臂303、柔性芯杆304、芯杆转盘305及变臂电机306,芯杆转盘305的边缘上设定一变臂中心307,从动臂301与变臂滑槽302分别设置于变臂中心307的两侧,侧支臂303、从动臂301及芯杆转盘305的一条半径组合成三角形;变臂电机306与芯杆转盘305共轴安装于侧支臂 303上,其中变臂电机的壳体端361与侧支臂303固连,变臂电机的驱动端 362与芯杆转盘305固连;柔性芯杆304绕于芯杆转盘305上,其一端固定于芯杆转盘305上,另一端穿入变臂滑槽302内,变模态摇臂3的变臂中心 307位于第二转轴7上,从动臂301与变臂滑槽302绕所述第二转轴7转动,输入摇臂1的输入从动端102通过输入连杆2与变模态摇臂3的从动臂301 相连,输出连杆4的一端与柔性芯杆304的穿入变臂滑槽的一端端头相连,输出连杆4的另一端与输出摇臂5的输出驱动端501相连。
23.本技术的飞机操纵系统变传动比装置,可以是纵向机械应急备份操纵系统,也可以是横向机械应急备份操纵系统。当其作为纵向机械应急备份操纵系统时,其与驾驶杆的末端连接,驾驶杆的末端通过机械机构连接于输入摇臂的输入驱动端,机械应急系统的拉杆摇臂传动机构连接于输出摇臂的输出从动端。当其作为横向机械应急备份操纵系统时,其与驾驶杆的末端连接,驾驶杆的末端通过机械机构连接于输入摇臂的输入驱动端,机械应急系统的钢索滑轮传动机构连接于输出摇臂的输出从动端。
24.以纵向机械应急备份操纵系统为例,参考图1及图2,输入驱动端101 偏转时,基于第一转轴6,带动输入从动端102偏转,之后通过输入连杆2,从动臂301发生偏转,基于第二转轴7,带动变臂滑槽302偏转,由于变臂滑槽302内具有柔性芯杆304的一个端头,并且该端头连接了输出连杆4,因此通过输出连杆4带动输出驱动端501偏转,基于第一转轴6,带动输出从动端502偏转,实现传动传输。
25.由于柔性芯杆304在变臂滑槽302内可以滑动,因此柔性芯杆304的上述描述的位于变臂滑槽302内的这个端头位置发生了变化,不同位置将带来不同的输入输出传动比,实
现机械应急操纵系统的传动比变换功能。
26.在一些可选实施方式中,所述第一转轴6与第二转轴7的间距、输入连杆2的长度、输出连杆4的长度是相等的,所述输入摇臂的输入从动端 102的长度与变模态摇臂的从动臂301的臂长相等。
27.该实施例中,输入从动端102、输入连杆2、从动臂301、第一转轴与第二转轴的连线构平行四边形机构,第一转轴与第二转轴的连线为固定机架,输入摇臂的转动角度与变模态摇臂的转动角度将始终相等。
28.在一些可选实施方式中,所述变模态摇臂的变臂滑槽302为圆弧形滑槽,并且在输入摇臂处于初始位置时变臂滑槽的圆心与输出摇臂的输出驱动端501的起始端头重合,所述起始端头为所述输出驱动端501与输出连杆4连接的一端。
29.通过该实施例,当柔性芯杆304的端头在变臂滑槽302内滑动时,实际为柔性芯杆304的端头在绕输出摇臂5的驱动端端头做圆周运动,故而在这种情况下,输出摇臂5没有机械位移产生;同时当输出摇臂5和变模态摇臂3之间有力的相互作用时,即输出连杆4对柔性芯杆的端头与变臂滑槽相互作动时,作用力的方向始终沿着变臂滑槽302的法向,对柔性芯杆304没有作用力,进一步所述变臂电机306也不会受到力的作用。
30.在一些可选实施方式中,所述变臂滑槽302的中心轴线穿过所述变臂中心307。
31.在一些可选实施方式中,所述变臂滑槽302靠近变臂中心307的一端与变臂中心307重合。
32.柔性芯杆304的端头与变臂中心的连线、第一转轴与第二转轴的连线、输出连杆、输出摇臂的输出驱动端组成为一个双摇杆机构,输出摇臂在变模态摇臂的驱动下,转动角度和“柔性芯杆端头与变臂中心连线、输入摇臂的输出驱动端臂长的比值”正相关,在一定范围内近似为线性相关。当柔性芯杆304的端头在变臂滑槽302内运动到变臂中心307的位置处时,柔性芯杆304的端头和变臂中心307的距离实际为0,此时无论输入摇臂转动角度多大,输出摇臂上没有任何机械角度输出。柔性芯杆304的端头与变臂中心307的连线推荐的最大长度为输出摇臂的输出驱动端501 的2倍,从而此装置可以实现从0至2的传动比的变换。
33.在一些可选实施方式中,如图3所示,所述侧支臂303具有两个支撑板,所述变臂电机306及芯杆转盘305安装于侧支臂的两个支撑板之间,所述变臂电机的壳体端361与侧支臂一侧的一个支撑板相连。
34.在一些可选实施方式中,飞机操纵系统变传动比装置还包括传动比变换开关8,连接所述变臂电机306,用于控制变臂电机306转动,变臂电机306带动芯杆转盘305运动,改变柔性芯杆304在变臂滑槽302内的一端端头的位置,从而改变变模态摇臂的输出臂长,所述输出臂长是指柔性芯杆304的变臂滑槽302内的一端端头到第二转轴7之间的距离。
35.在一些可选实施方式中,飞机操纵系统变传动比装置还包括全传动比电门9、半传动比电门10和零输出电门11,全传动比电门9设置于变臂滑槽302的外伸端端头处,半传动比电门10位于变臂滑槽302中部处,零输出电门11位于变臂滑槽302靠近变臂中心307的一端,三组电门能够被柔性芯杆304在变臂滑槽内的端头靠近触发。
36.该实施例中,靠近触发通常为按压触发,备选实施方式中,所述全传动比电门9、半传动比电门10和零输出电门11均为磁性敏感电门,柔性芯杆304在变臂滑槽内的端头为导
磁性材料,三组电门能够被柔性芯杆 304在变臂滑槽内的端头非接触触发。
37.与上述两个实施例相对应的,本技术所述传动比变换开关8具有全传动比、半传动比、零输出三个位置,通过开关的选择控制变臂电机306的运动,带动芯杆转盘305运动,进一步带动柔性芯杆304在变臂滑槽302内的端头触发全传动比电门、半传动比电门和零输出电门,使变臂电机306 停止于在传动比变换开关指令的位置。该实施例的三组电门与传动比变换开关的位置构成变臂电机的起停电路、传动比变换开关发出变臂电机正转、反转的指令,柔性芯杆304的端头触发与传动比变换开关位置对应的三组电门之一后,变臂电机停止于该位置,从而使机械应急操纵系统工作于该传动比状态下。具体有以下几种工作模态:
38.(i)当飞机在电传飞行控制系统的控制下,本技术提供的飞机操纵系统变传动比装置处于零输出状态,驾驶杆运动时,机械应急操纵系统的传动机构不运动;
39.(ii)当飞机从电传飞行控制系统转入机械应急操纵系统的控制,并且飞机处于高速飞行(如大于300km/h)状态下,本技术提供的飞机操纵系统变传动比装置处于半传动比状态,驾驶杆前后操纵时,机械应急操纵系统的传动机构传递部分指令至飞机升降舵舵面,使飞机的升降舵处于一种柔和的控制模态下;
40.(iii)当飞机从电传飞行控制系统转入机械应急操纵系统的控制,并且飞机处于中低速飞行状态下(如小于300km/h),本技术提供的飞机操纵系统变传动比装置处于全传动比状态,驾驶杆前后操纵时,机械应急操纵系统的传动机构传递部分指令至飞机升降舵舵面,使飞机的升降舵处于一种精确且高机动的控制模态下。
41.在一些可选实施方式中,本技术还包括传动比指示器12,传动比指示器12按照全传动比电门、半传动比电门和零输出电门的触发信号指示本技术所述的变传动比装置的状态,使飞机的驾驶员可以清晰的识别出飞机此时处于何种操控模态下。
42.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1