飞行器起飞推力控制方法、装置及存储介质与流程
本发明涉及飞机控制,尤其涉及一种飞行器起飞推力控制方法、装置及存储介质。
背景技术:
1、产生推力是飞机引擎工作的基本目的,推力可以改变飞机的速度,使飞机克服惯性而向前运动,同时使空气在机翼上下表面运动,从而产生压力,将机翼向上推。在飞机起飞阶段,推力控制不仅需要满足飞机爬升梯度的要求,同时需要兼顾发动机寿命并减少飞机噪音。为了最大化满足起飞要求,确定起飞推力如何转换以及如何设置转换设置条件是关键。
2、现有技术中,起飞推力控制相关的专利针对起飞阶段的推力做了研究,但是没有针对飞管模式而确定起飞推力逻辑的相关方法,不能在起飞阶段自动管理飞机推力控制,需要依赖飞行员控制飞机推力,推力使用不当还会造成对飞机发动机造成损耗。因此,现有技术中存在飞行器起飞阶段不能自动管理飞机推力控制的技术问题。
技术实现思路
1、本发明提供了一种飞行器起飞推力控制方法、装置及存储介质,旨在有效解决现有技术中在飞行器起飞阶段,不能自动管理飞机推力控制的技术问题。
2、根据本发明的一方面,本发明提供一种飞行器起飞推力控制方法,所述方法包括:
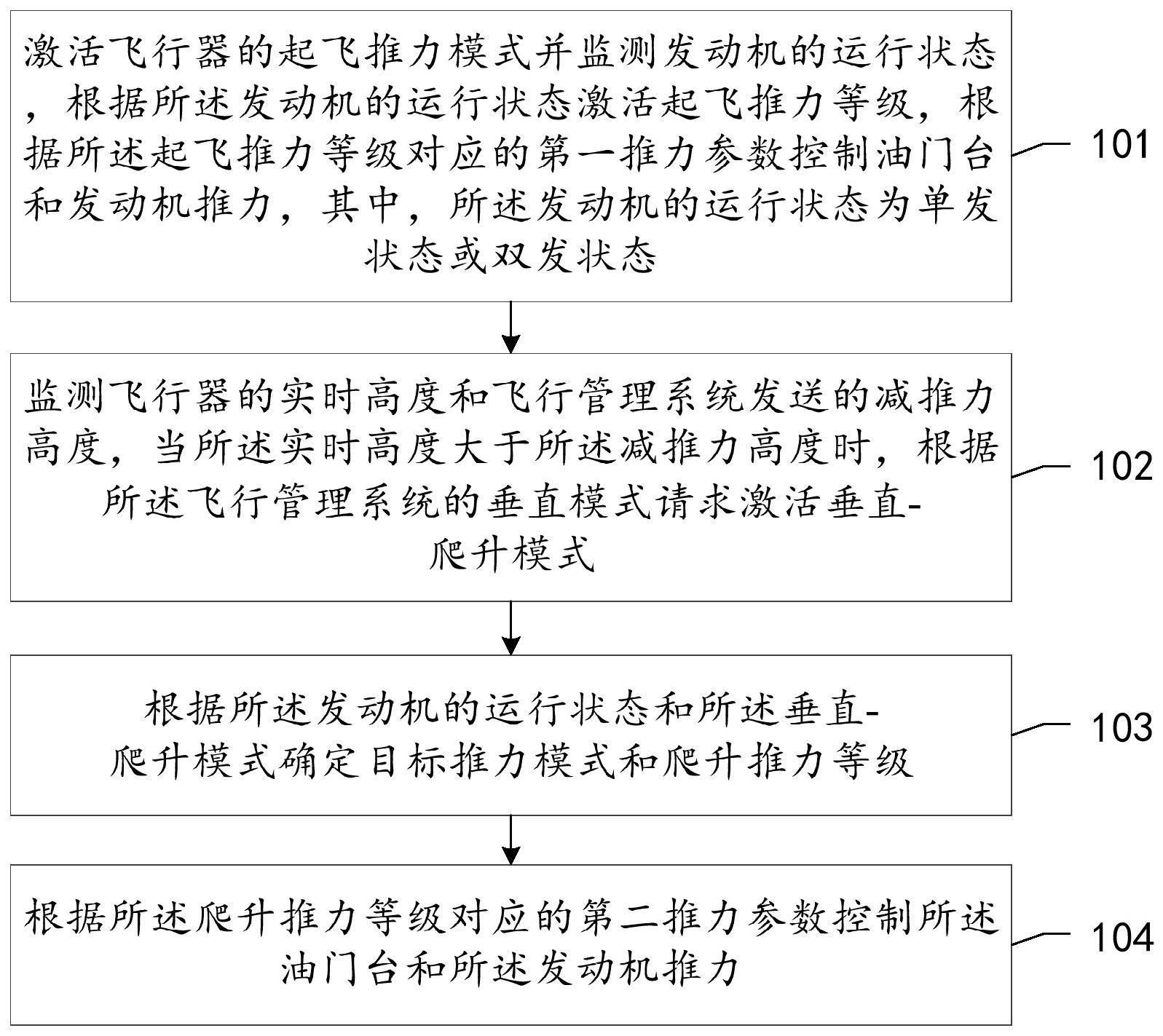
3、激活飞行器的起飞推力模式并监测发动机的运行状态,根据所述发动机的运行状态激活起飞推力等级,根据所述起飞推力等级对应的第一推力参数控制油门台和发动机推力,其中,所述发动机的运行状态为单发状态或双发状态;
4、监测飞行器的实时高度和飞行管理系统发送的减推力高度,当所述实时高度大于所述减推力高度时,根据所述飞行管理系统的垂直模式请求激活垂直-爬升模式;
5、根据所述发动机的运行状态和所述垂直-爬升模式确定目标推力模式和目标推力等级;
6、根据所述目标推力等级对应的第二推力参数控制所述油门台和所述发动机推力。
7、进一步地,所述激活飞行器的起飞推力模式包括:
8、当飞行器处于地面时,接收飞行员在飞行模式控制板上输入的垂直导航模式按钮指令,基于所述垂直导航模式按钮指令对垂直导航模式进行预位操作;
9、接收飞行员输入的起飞/复飞模式接通指令,基于所述起飞/复飞模式接通指令激活所述起飞推力模式。
10、进一步地,所述根据所述发动机的运行状态激活起飞推力等级包括:
11、自动飞行系统发送起飞推力等级请求至全权数字式发动机控制装置;
12、全权数字式发动机控制装置确定所述发动机的运行状态,并根据所述发动机的运行状态确定所述第一推力参数和起飞推力等级响应,发送所述起飞推力等级响应至自动飞行系统;
13、当所述起飞推力等级请求对应的推力等级和所述起飞推力等级响对应的推力等级保持一致时,自动飞行系统激活所述起飞推力等级。
14、进一步地,所述根据所述起飞推力等级对应的第一推力参数控制油门台和发动机推力包括:
15、自动飞行系统根据所述第一推力参数确定起飞推力目标值,并基于所述起飞推力目标值生成自动油门指令,根据所述自动油门指令控制所述油门台和所述发动机推力。
16、进一步地,所述方法还包括:
17、在所述监测飞行器的实时高度和飞行管理系统发送的减推力高度之后,若所述减推力高度小于所述实时高度且所述发动机的运行状态为所述单发状态时,自动飞行系统持续监测所述飞行管理系统发送的所述减推力高度直至所述实时高度大于所述减推力高度。
18、进一步地,所述根据所述飞行管理系统的垂直模式请求激活垂直-爬升模式包括:
19、自动飞行系统监测所述飞行管理系统发送的所述垂直模式请求;
20、当所述垂直模式请求为垂直-飞行高度层改变模式请求时,自动飞行系统将垂直-飞行高度层改变模式的可用参数设置为表征激活状态的第一参数。
21、进一步地,所述根据所述发动机的运行状态和所述垂直-爬升模式确定目标推力模式和目标推力等级包括:
22、当所述发动机的运行状态为所述单发状态时,自动飞行系统根据所述垂直-飞行高度层改变模式确定所述目标推力模式为飞行高度层改变模式;
23、自动飞行系统根据所述垂直-飞行高度层改变模式确定所述目标推力等级为最大连续推力等级。
24、进一步地,所述根据所述发动机的运行状态和所述垂直-爬升模式确定目标推力模式和目标推力等级包括:
25、当所述发动机的运行状态为所述双发状态时,自动飞行系统根据所述垂直-飞行高度层改变模式确定所述目标推力模式为飞行高度层改变模式;
26、自动飞行系统根据所述垂直-飞行高度层改变模式确定所述目标推力等级为爬升推力等级;
27、当所述发动机的运行状态由所述双发状态切换为所述单发状态时,所述目标推力等级由所述爬升推力等级转换为最大连续推力等级。
28、进一步地,所述根据所述目标推力等级对应的第二推力参数控制所述油门台和所述发动机推力包括:
29、自动飞行系统根据所述第二推力参数确定爬升推力目标值,并基于所述爬升推力目标值生成自动油门指令,根据所述自动油门指令控制所述油门台和所述发动机推力。
30、进一步地,所述方法还包括:
31、在所述根据所述飞行管理系统的垂直模式请求激活垂直-飞行高度层改变模式之后,监测飞行管理系统发送的目标速度,若所述目标速度不在预设的目标速度范围内,则关闭所述垂直-爬升模式。
32、进一步地,所述目标速度范围的最小值为飞行器的最小特征速度,所述目标速度范围的最大值为飞行器的最大特征速度。
33、进一步地,所述方法还包括:
34、当飞行器停止飞行后的落地时间大于预设的第一时间长度时,自动飞行系统将所述垂直-飞行高度层改变模式的可用参数设置为表征关闭状态的第二参数。
35、进一步地,所述方法还包括:
36、在所述激活飞行器的起飞推力模式并监测发动机的运行状态之后,计算飞行器处于所述起飞推力模式时的累计时间长度;
37、当所述发动机的运行状态为所述单发状态且所述累计时间长度大于第二时间长度时,发送提示信号;
38、当所述发动机的运行状态为所述双发状态且所述累计时间长度大于第三时间长度时,将所述起飞推力等级切换为最大连续推力等级,其中,所述第二时间长度大于所述第三时间长度。
39、根据本发明的另一方面,本发明还提供了一种飞行器起飞推力控制装置,所述装置包括:
40、起飞推力模块,用于激活飞行器的起飞推力模式并监测发动机的运行状态,根据所述发动机的运行状态激活起飞推力等级,根据所述起飞推力等级对应的第一推力参数控制油门台和发动机推力,其中,所述发动机的运行状态为单发状态或双发状态;
41、第一爬升推力模块,用于监测飞行器的实时高度和飞行管理系统发送的减推力高度,当所述实时高度大于所述减推力高度时,根据所述飞行管理系统的垂直模式请求激活垂直-爬升模式;
42、第二爬升推力模块,用于根据所述发动机的运行状态和所述垂直-爬升模式确定目标推力模式和目标推力等级;
43、第三爬升推力模块,用于根据所述目标推力等级对应的第二推力参数控制所述油门台和所述发动机推力。
44、根据本发明的另一方面,本发明还提供了一种存储介质,所述存储介质中存储有多条指令,所述指令适于由处理器加载以执行如上所述的任一飞行器起飞推力控制方法。
45、通过本发明中的上述实施例中的一个实施例或多个实施例,至少可以实现如下技术效果:
46、在本发明所公开的技术方案中,自动飞行系统接收飞行管理系统的模式请求、减推力高度、速度目标等信号,作为判断垂直-爬升模式接通的条件,接收全权数字式发动机控制装置发送的可接受的推力等级、推力参数(n1参考值)、发动机的运行状态等信号,在自动飞行计算机中计算出接通的飞行指引模式、接通的自动油门模式和接通的推力等级,进而确定推力目标值,通过发送控制指令至油门台进而控制发动机,实现起飞阶段的推力控制。本方案基于管理模式控制起飞推力,实现了在飞机起飞阶段自动管理飞机推力控制,能够减轻飞行员在起飞阶段的工作负荷。此外,在激活起飞推力模式后,设置起飞推力接通计时功能,并行实现起飞阶段自动管理飞机的推力控制,防止起飞推力时间太长而损害发动机,可以有效延长发动机使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!