一种模块化可重构卫星分布式自组织重构方法及其系统
本发明属于卫星领域,具体涉及一种模块化可重构卫星分布式自组织重构方法及其系统。
背景技术:
1、近年来,为了解决日益增长的航天任务需求和卫星系统复杂性之间的矛盾,模块卫星的研究逐渐兴起。模块卫星通过各模块移动可以改变卫星的整体构型,从而适应不同的任务需求,一星多用。尽管任务目标不同,但航天器均需从初始构型重构到目标构型,因而,重构规划算法成为模块卫星实现在轨自重构的必要研究课题。
2、重构问题目前暂未设计出一种通用的解决方案。目前,存在一些针对模块机器人重构问题的解决方案,按照是否具有统一的核心运算模块分为集中式重构算法和分布式重构算法两类。
3、集中式重构算法要求模块机器人存在核心的控制运算模块,对系统的所有模块规划目标位置和运动路线。集中式自重构规划采取全局信息的方式,占用了很多通信资源。同时,与多模块并行的分布式重构方式相比,集中式的单模块运动重构时间较长。因此,每个模块仅根据少量的自身环境信息做出动作决策,实现自变构的分布式规划算法的设计是一个亟需解决的重要问题。
4、butler等人针对大规模数量模块机器人重构问题提出了一种分布式规划和驱动算法,虽然能够比较完备的解决重构问题,但很难保证模块运动的碰撞避免。daudelin等人建立了一个机器人行为库,模块化机器人系统通过对任务和环境的分析决定如何重构来完成任务,然而该方法无法应用于不可预测的复杂的太空任务。
5、元胞自动机是一种按照一定的局部演化规则,在离散的时间上进行演化的动力系统,其作为模块机器人分布式重构算法的重要组成部分,为许多学者所研究。上海交通大学费艳琼教授团队建立了基于元胞自动机的紧急控制模型,这种规划算法利用当前构型与目标构型的构型不重合度作为距离函数,会出现算法收敛速度较慢的问题,具有一定的优化空间。
6、目前元胞自动机系统与模块机器人的契合仍然存在着ca规则的建立和适用范围等问题。ca规则的建立依赖于作者的认知及经验,不具有系统性。同时对于自由度较多的栅格立方体模块机器人,ca运动规则数量较多。对模块的计算能力和储存能力具有一定的要求。
7、对于分布式模块机器人系统的自组织性,主要的方法是利用梯度吸引的方式。传统分布式算法利用碰撞复位策略解决几个模块同时运动到同一位置的问题,但容易造成模块的损坏。stanton等人提出了一种不使用预处理或消息传递来实现重构的算法。该算法通过利用边进行信息传递来消除模块碰撞的可能性,但在实际应用中,模块多以面连接来进行信息传递,算法实现的难度较大。
技术实现思路
1、本发明提供一种模块化可重构卫星分布式自组织重构方法及其系统,用以解决于立方体模块卫星重构问题。
2、本发明通过以下技术方案实现:
3、一种模块化可重构卫星分布式自组织重构方法,所述重构方法具体包括以下步骤:
4、步骤1:建立基于l系统的模块卫星构型表达方式;将表达方式,应用于分布式自重构规划算法的迭代和拆分运算中;
5、步骤2:建立模块卫星重构中元胞自动机模型;
6、步骤3:利用梯度传播控制整体构型的变构方向;
7、步骤4:规划模块的运动优先级解决模块碰撞的问题;
8、步骤5:实现多模块并行运动分布式自重构。
9、一种模块化可重构卫星分布式自组织重构方法,所述步骤1模块卫星构型表达方式具体为,所述l系统包括四元组(v,s,ω,p),其中v为系统所有的变量字符的合集;s为l系统所有的常量字符的合集;ω为l系统的初始状态,由非空的字符组成;p为产生式规则,即系统运行过程中,字符通过运用产生式规则不断迭代扩展;
10、所述l系统通过字符集中的字符从初始状态开始,不断运用产生式规则迭代生成表示图形分型的字符串。
11、一种模块化可重构卫星分布式自组织重构方法,所述述l系统整体字符串通过不断迭代,在二维空间中通过迭代描述几何结构;同时通过引入旋转变量字符集将变量字符集扩展到三维空间,实现借助l系统用简单字符串构建三维模块卫星构型。
12、一种模块化可重构卫星分布式自组织重构方法,所述步骤2建立模块卫星重构中元胞自动机模型具体为,所述元胞自动机包括元胞、元胞空间、元胞邻居和元胞规则;在模块卫星重构中元胞即为单模块;元胞空间为卫星模块分布的空间格点;三维栅格结构;元胞邻居即模块的邻居模块;
13、采用冯若依曼型邻居空间,维数为3,则一个元胞的邻居数量为6;
14、模块卫星重构中元胞自动机模型通过模块运动和状态转变实现系统的迭代和更新。
15、一种模块化可重构卫星分布式自组织重构方法,所述模块卫星中各个模块在满足ca运动规则的前提下进行运动,各个模块的ca运动规则和规划方法一致。模块基于有限的存储能力,并不储存过去的状态,仅储存当前状态下用于运功规划的相关信息,当模块运动,位置改变,其内部状态信息也随之更新。模块内部坐标系随着运动进行迭代,始终保持和整体坐标系一致;
16、通过模块的本体坐标系旋转的方式,将模块运动的方向和本体坐标系的某一固定坐标轴重合,实现了将三维空间的模块运动规则转换到二维平面。
17、一种模块化可重构卫星分布式自组织重构方法,绕x,y和z三轴旋转的旋转矩阵如下,其中θ可能的取值为
18、
19、
20、
21、初始状态下模块的本体坐标系与构型环境坐标系一致;当时刻开始,从邻居模块得到相对位置信息和高梯度方向;高梯度的方向定为本体坐标系的z轴,环境坐标系进行逆时针一次旋转转换到本体坐标系;通过旋转角度和旋转轴选取旋转矩阵,将邻居模块在环境坐标系的相对坐标转换到本体坐标系中;利用二维平面的模块运动条件判断模块运动规则;进行运动后,本体坐标系通过两次旋转实现与环境坐标系一致,其中一次旋转抵消模块运动产生的坐标系转换,一次旋转抵消运动规划时产生的坐标系转换。
22、一种模块化可重构卫星分布式自组织重构方法,所述二维平面内的ca规则利用模块本体坐标系的旋转将不同方向和角度的运动规则转换到统一的坐标系下,最终用统一的2条ca规则对模块的状态转换进行指导;当邻居模块的状态满足ca规则时,模块可以进行运动;
23、为实现分布式系统的自组织,采用梯度下降的扩散方式,使得系统中的备用模块向高梯度的方向运动;梯度下降是梯度源释放低梯度,随着梯度的扩展,模块中的梯度不断下降,模块的运动方向是沿着梯度上升的方向。
24、一种模块化可重构卫星分布式自组织重构方法,一个模块的梯度值迭代依赖于其邻居模块传递的梯度值。设模块i在t时刻的梯度为gradi(t),ni为模块i的邻居模块的集合;在接收到邻居模块传递的梯度值后,梯度值最大的方向是模块的运动方向。当系统模块根据l系统转录字符串检测发现与系统模块相邻的某一位置需要存在一个模块时,如果该位置不存在模块,则在这个方向上释放一个高梯度信息。当模块具有两个相同的梯度时,随机选取一个梯度方向作为运动方向;
25、如果模块在按照ca规则进行运动规划过程中收到其他模块运动到同一位置的信息,则根据运动信息的优先级进行判断,在符合梯度方向且运动优先级相同时,采用随机策略来选取运动方式;避免几个模块在同一时刻向同一位置运动从而产生碰撞的情况;同时通过将利用全局信息的全局搜索转变为利用局部信息的局部搜索解决分布式系统的整体连接性问题。
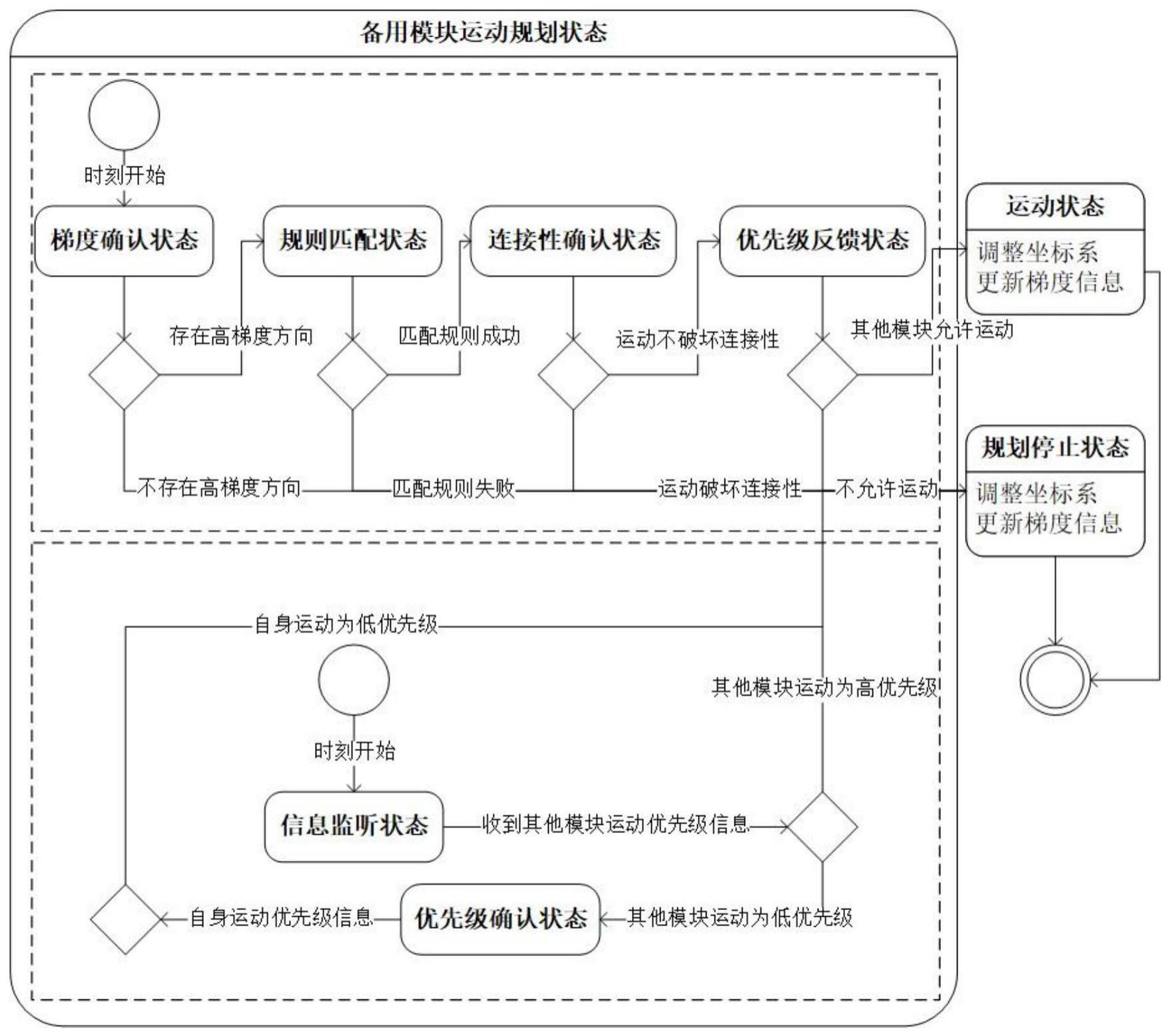
26、一种模块化可重构卫星分布式自组织重构方法,备用模块在一个离散的时间间隔内要完成确认运动方向、匹配ca运动规则、确认构型连接性、确认运动优先级和完成运动五个过程;
27、在t=0时刻,初始构型中所有的模块均为备用模块,可以按照梯度方向在满足ca规则的情况下进行自由运动。系统模块储存着l系统转录字符串,在前方需要有模块的位置释放高梯度,吸引备用模块移动到需要模块的位置,然后将l系统转录字符串传递过去,自身转换状态成为固定模块;移动过来的备用模块接受到部分l系统转录字符串,成为新的系统模块;
28、当系统模块遇到l系统转录字符串中的分支时,会产生一个新的系统模块,自身状态不改变,实现并行;最终实现所有的模块均转换为固定模块,模块卫星重构过程完成。
29、一种模块化可重构卫星分布式自组织重构系统,所述重构系统利用如权利要求1所述重构方法,所述重构系统包括构建单元、元胞自动机单元和模块规划单元;
30、所述构建单元,用于建立基于l系统的模块卫星构型表达方式,应用于分布式自重构规划算法的迭代和拆分运算中;
31、所述元胞自动机单元,用于建立模块卫星重构中元胞自动机模型;利用梯度传播控制整体构型的变构方向;
32、所述模块规划单元,用于规划模块的运动优先级解决模块碰撞的问题,实现多模块并行运动分布式自重构。
33、本发明的有益效果是:
34、本发明相比于集中式规划算法,分布式重构规划算法每个模块仅根据少量的自身环境信息和设定的运动规则进行并行运动。采用多模块并行运动的重构方式大大提高了重构速度。同时,分布式自重构规划不需要每个模块都有整体构型的拓扑连接信息,节省了模块间通信资源。
35、本发明提出的分布式重构规划算法适用于模块数量较多的模块卫星重构问题,在模块数量增多的情况下也保持一定的收敛速度和性能,算法的时间复杂度和空间复杂度不会随着模块数量的增多而指数增长,解决了模块卫星集中式重构规划方法的问题。
36、与以往的研究相比,本发明设计的ca规则在规则数量和所需的信息传递过程中有明显的简化。这样减少了判断过程和储存空间,提高了模块运动规划的速度,同时对模块的运算能力要求也降低了。
37、通过梯度扩散的方式有利于减小模块间的信息通讯。当模块具有两个相同的梯度时,随机选取一个梯度方向作为运动方向,而不需要像传统的分布式系统一样,模块通过随机移动判断自身的运动方向是否正确,有效的降低了模块的总体运动步数,提高了分布式系统重构的效率。
38、传统分布式算法中的碰撞复位策略,容易造成模块的损坏。本发明利用系统模块和备用模块运动优先级的属性消解自重构规划过程中的可能存在的碰撞,在模块运动之前就避免了模块因碰撞产生损坏失效的情况。
39、通过保持单个模块运动时邻居模块的连接性,保证分布式系统中多模块并行时的构型整体连接性。利用有限环境下模块的局部连接关系保证模块卫星自重构过程中的连接性约束,将整体的运算在分布式系统中进行拆解,提高了运算效率,这也是分布式系统的一个优势。
- 还没有人留言评论。精彩留言会获得点赞!