面向航天器角振动抑制的自适应跟踪滤波控制方法及装置与流程
本发明涉及航天器角振动抑制领域,并且更具体地,涉及一种面向航天器角振动抑制的自适应跟踪滤波控制方法及装置。
背景技术:
1、近年来,中国在遥感卫星领域发展迅猛,据统计在2020年以前我国成功发射的陆地卫星、气象卫星和海洋卫星三类遥感卫星共计200余颗。目前,高精度遥感卫星的地面分辨率主要在0.1米至0.5米之间。一般来说,低分辨率相机具有孔径小、焦距短、结构固有频率较高的特点,相对于卫星平台而言其结构刚度较大,在扰振载荷作用下的动力学响应以相机整体运动为主。而对于大孔径、长焦距的高分辨率相机,其结构固有频率较低且较为密集。在扰振载荷作用下,除相机整体运动外,结构动态变形引起的各光学元件及探测器之间的相对运动会对像移产生不可忽略的影响,因此,航天器扰振的存在会对高精度相机的工作性能造成严重影响。
2、航天器在轨运行过程中主要有两类扰振源,一类是来自外部空间环境的外部扰动源,例如太阳辐射、热效应、重力梯度等;另一类是自身活动部件的内部扰动源,例如控制力矩陀螺(control moment gyro,简称cmg)、动量轮、制冷机等。有效载荷敏感度不同,所需要的角振动抑制指标也会存在较大差异,对于高精度成像相机,要求相机视轴稳定度要优于0.1″。卫星上的振动属于角振动,分布频带广,通常为10-6hz~1khz,且幅值小,一般在微米量级甚至更小。
3、根据控制系统是否需要外加能源,振动控制方法可分为被动控制方法和主动控制方法。传统航天器大多采用被动控制技术,近些年随着航天器对控制精度要求不断提升,航天器主动振动控制技术已成为主流。国内相关团队开展了航天器主动振动控制方法的研究,文献《stewart并联机构主动隔振平台的非线性l2鲁棒控制》(杨涛等,机器人,2009,31(3):210-206)提出了一种基于六足主动支架平台的航天器主动隔振系统,设计了一种非线性的鲁棒主动控制方法。文献《基于主被动一体隔振指向平台的柔性航天器高精高稳指向方法》(徐广德等,航天器程,2019,28(6):15-23)同样基于六足主动支架平台提出了一种航天器隔振和指向一体化系统,对每个支架都采用了积分力反馈控制方法抑制角振动。以上控制方法均适合中低频段的振动控制,对于上中高频段的振动难以发挥作用。
4、因此,现有的航天器高精度成像相机的角振动抑制方法存在控制复杂度高、适应性差、可靠性差以及灵活性差的问题。
技术实现思路
1、为了解决上述背景技术中的至少一项技术问题,本发明提供一种面向航天器角振动抑制的自适应跟踪滤波控制方法及装置,可用于对遥感卫星上高精度成像相机的角振动抑制,提升相机成像质量。
2、根据本发明的一个方面,提供了一种面向航天器角振动抑制的自适应跟踪滤波控制方法,包括:
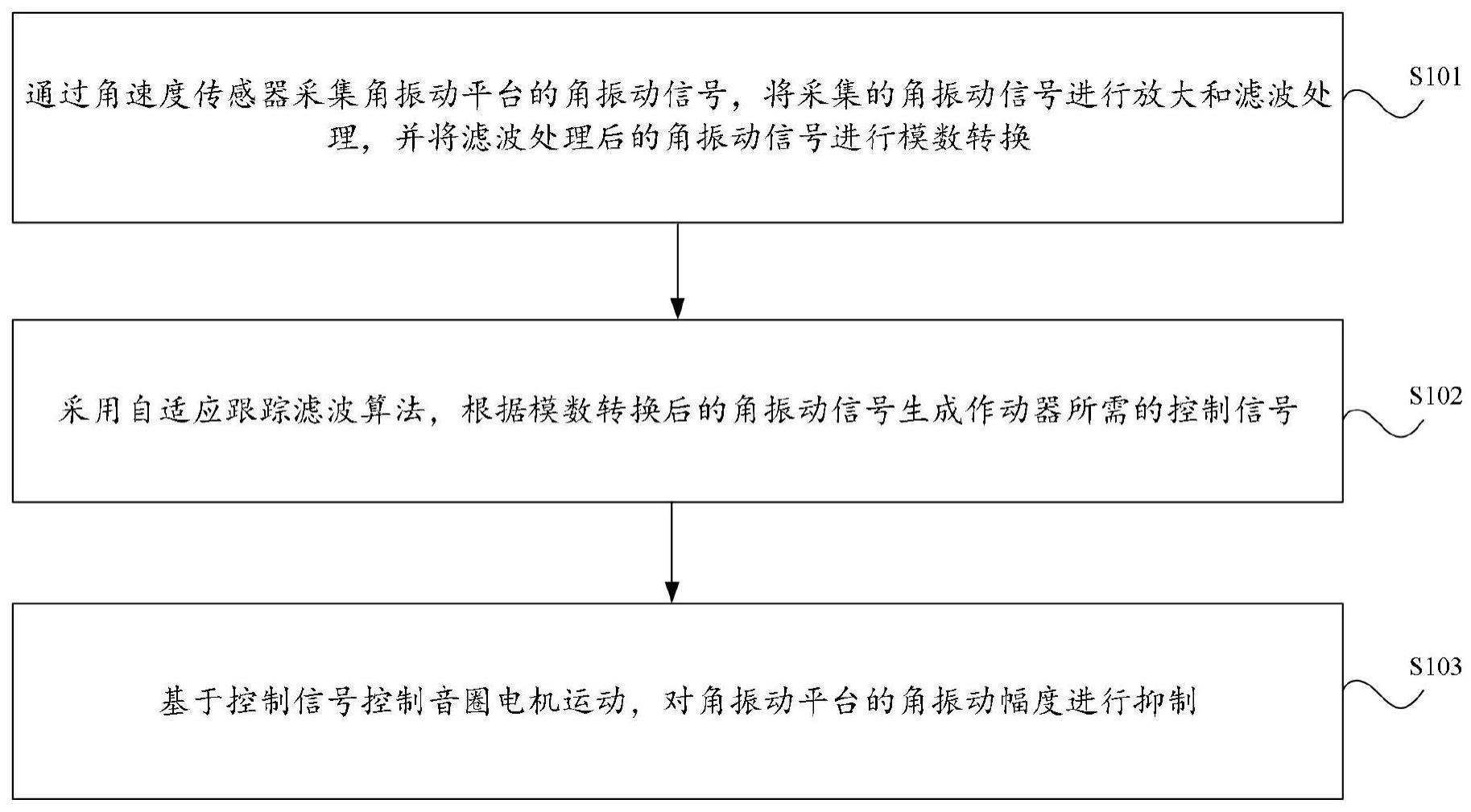
3、通过角速度传感器采集角振动平台的角振动信号,将采集的角振动信号进行放大和滤波处理,并将滤波处理后的角振动信号进行模数转换;
4、采用自适应跟踪滤波算法,根据模数转换后的角振动信号生成作动器所需的控制信号;
5、基于控制信号控制音圈电机运动,对角振动平台的角振动幅度进行抑制。
6、可选地,所述采用自适应跟踪滤波算法,根据模数转换后的角振动信号生成作动器所需的控制信号,包括:
7、设置模数转换后的角振动信号中扰振信号的振动频率;
8、引入与扰振信号同频率的一组正弦信号与余弦信号,作为正弦参考信号和余弦参考信号;
9、基于扰振信号的振动频率、正弦参考信号的第一权系数和余弦参考信号的第二权系数,计算第n步的控制信号;
10、基于扰振信号和第n步的控制信号,计算角振动平台的误差信号;
11、基于误差信号,计算自适应跟踪滤波算法的步长因子;
12、基于扰振信号、误差信号和步长因子,更新正弦参考信号的第一权系数和余弦参考信号的第二权系数;
13、基于扰振信号的振动频率、更新后的正弦参考信号的第一权系数和余弦参考信号的第二权系数,计算第n+1步的控制信号,直至角振动平台达到稳定状态。
14、可选地,所述扰振信号的振动频率记为wd,扰振信号d(n)的表达式为:
15、d(n)=dsin(wdn+γ) (1)
16、式中,d(n)为扰振信号,d为信号幅值,wd为扰振信号的振动频率,n为离散的时间序列,γ为扰振信号的相位;
17、并且,基于扰振信号的振动频率、正弦参考信号的第一权系数和余弦参考信号的第二权系数,计算第n步的控制信号,包括:
18、u(n)=an sin(wdn)+bn cos(wdn) (2)
19、式中,u(n)为第n步的控制信号,an为第n步的正弦参考信号的第一权系数,wd为扰振信号的振动频率,n为离散的时间序列,bn为第n步的正弦参考信号的第二权系数,an和bn的初值都为0。
20、可选地,所述第n步的控制信号经控制器后产生的输出信号y(n)的表示形式为:
21、
22、式中,假设传递函数h的表示形式为α表示传递函数h的放大倍数,表示传递函数h的相位,n为离散的时间序列,an为第n步的正弦参考信号的第一权系数,wd为扰振信号的振动频率,bn为第n步的正弦参考信号的第二权系数,an和bn的初值都为0;
23、并且,所述基于扰振信号和第n步的控制信号,计算角振动平台的误差信号,包括:
24、基于扰振信号和输出信号y(n),通过以下公式计算角振动平台的误差信号:
25、e(n)=y(n)+d(n) (4)
26、式中,e(n)为误差信号,y(n)为控制信号经控制器后产生的输出信号,d(n)为扰振信号。
27、可选地,所述基于误差信号,计算自适应跟踪滤波算法的步长因子,包括:
28、基于误差信号,通过以下公式计算自适应跟踪滤波算法的步长因子:
29、μ(n)=β(1-e-|e(n)||e(n-1)|) (5)
30、式中,μ(n)为自适应跟踪滤波算法的步长因子,β为步长迭代系数,e(n)为误差信号,n为离散的时间序列。
31、可选地,所述基于扰振信号、误差信号和步长因子,更新正弦参考信号的第一权系数和余弦参考信号的第二权系数,包括:
32、基于扰振信号、误差信号和步长因子,通过以下公式更新正弦参考信号的第一权系数:
33、an+1=an+μ(n)e(n)sin(wdn) (6)
34、其中,an+1为第n+1步的正弦参考信号的第一权系数,an为第n步的正弦参考信号的第一权系数,μ(n)为步长因子,e(n)为误差信号,wd为扰振信号的振动频率,n为离散的时间序列;
35、基于扰振信号、误差信号和步长因子,通过以下公式更新余弦参考信号的第二权系数:
36、bn+1=bn+μ(n)e(n)cos(wdn) (7)
37、其中,bn+1为第n+1步的余弦参考信号的第二权系数,an为第n步的余弦参考信号的第二权系数,μ(n)为步长因子,e(n)为误差信号,wd为扰振信号的振动频率,n为离散的时间序列。
38、可选地,所述基于控制信号控制音圈电机运动,对角振动平台的角振动幅度进行抑制,包括:
39、通过功率放大器将控制信号转换后输出驱动信号;
40、基于驱动信号对吸振系统内音圈电机的运动进行控制;
41、通过音圈电机运动产生的惯性力,抑制角振动平台的角振动幅度。
42、根据本发明的又一个方面,提供了一种面向航天器角振动抑制的自适应跟踪滤波控制装置,包括:
43、信号采集及处理模块,用于通过角速度传感器采集角振动平台的角振动信号,将采集的角振动信号进行放大和滤波处理,并将滤波处理后的角振动信号进行模数转换;
44、控制信号生成模块,用于采用自适应跟踪滤波算法,根据模数转换后的角振动信号生成作动器所需的控制信号;
45、角振动幅度抑制模块,用于基于控制信号控制音圈电机运动,对角振动平台的角振动幅度进行抑制。
46、根据本发明的又一个方面,提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序用于执行本发明上述任一方面所述的方法。
47、根据本发明的又一个方面,提供了一种电子设备,所述电子设备包括:处理器;用于存储所述处理器可执行指令的存储器;所述处理器,用于从所述存储器中读取所述可执行指令,并执行所述指令以实现本发明上述任一方面所述的方法。
48、本发明首先通过角速度传感器采集角振动平台的角振动信号,将采集的角振动信号进行放大和滤波处理,并将滤波处理后的角振动信号进行模数转换,然后采用自适应跟踪滤波算法,根据模数转换后的角振动信号生成作动器所需的控制信号,最后基于控制信号控制音圈电机运动,对角振动平台的角振动幅度进行抑制。本发明可直接适用于角振动控制,减小了控制过程复杂度。本发明适应性强,可靠性高,方法需要调节的参数少,仅包括迭代系数和特征频点的频率,通过参数设置可以对任意频率的振动进行高效抑制。本发明的控制方法灵活性强,传感器与控制机构的安装位置不受限制,可以对任意位置组合条件下二者之间的传递特性进行快速实时辨识求解。本发明对现有隔振技术的发展和完善,可进一步提高视轴稳定度,提高成像质量,具有重要推广应用价值。
- 还没有人留言评论。精彩留言会获得点赞!