一种多自由度的扑翼机起降装置及测试装置
本发明涉及起降测试装置的,特别是一种多自由度的扑翼机起降装置及测试装置。
背景技术:
1、仿生扑翼无人机具有体积小、重量轻、隐蔽性好、成本低、携带方便、以及能在低雷诺数环境的特殊气动领域工作的特点,因而常被用于战争勘察、监视、敌后情报、以及城市信息收集等领域。
2、针对上述在低雷诺数下对仿生扑翼无人机的飞行机制、以及控制性能开展测试研究,测试中需要模仿飞行生物的起降姿态,并根据预设落点测试控制算法,从而获得研究飞行机制和优化控制算法所需的实验参数,因而往往要开展多次多组重复的实验。而通过人手抛飞等方式,无法准确控制起降姿态,而且实验参数也无法测量。
3、公告号为cn215514189u的中国实用新型公开了一种扑翼无人机弹射起飞装置,其利用简易的弹簧以及滑轨实现扑翼无人机的弹射起飞,且上述装置是通过人力拉伸弹簧,且其起飞角度固定,由此其无法模仿飞行生物的实际姿态。
技术实现思路
1、本发明要解决的技术问题是:提供一种多自由度的扑翼机起降装置及测试装置,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
2、本发明解决其技术问题的解决方案是:
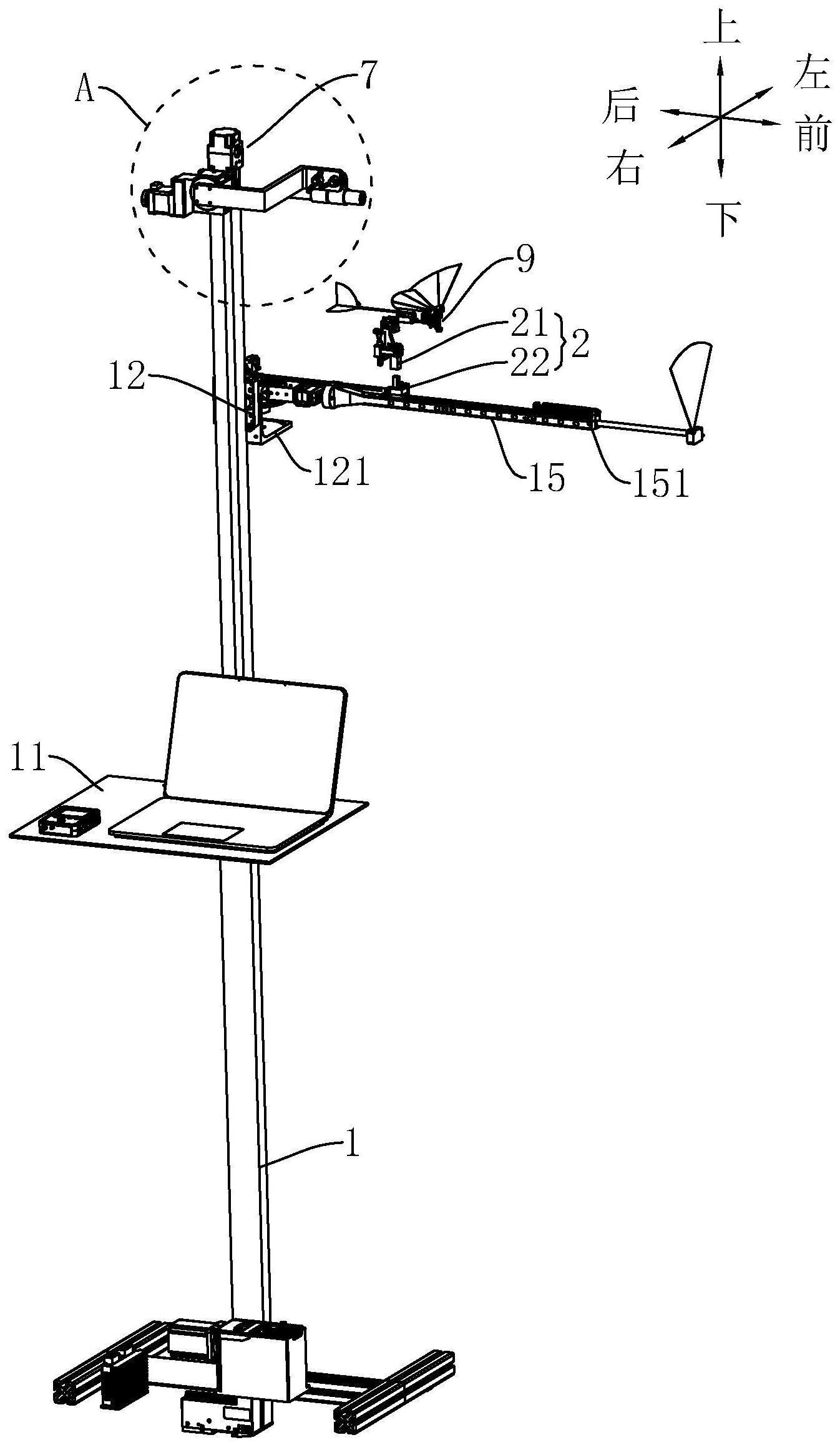
3、一种多自由度的扑翼机起降装置,其具有相互正交的前后、左右和上下方向,包括:架体;控制器;直线模块,其连接于所述架体,所述直线模块驱动连接有滑动架,所述滑动架沿竖直方向运动,所述滑动架设置有旋转平台,所述旋转平台的转动轴线沿上下方向设置;俯仰模块,其连接于所述旋转平台;滚转模块,所述俯仰模块驱动所述滚转模块做俯仰运动;悬臂,所述滚转模块驱动所述悬臂转动,所述悬臂的转动轴线沿前后方向设置;释放模块,其沿前后方向滑动连接于所述悬臂,所述释放模块用于夹持或释放所述扑翼机;动能弹性件,其前端连接在所述悬臂上、后端与所述释放模块连接,所述动能弹性件为所述释放模块提供动能;牵引模块,其连接于所述旋转平台,所述牵引模块驱动连接所述释放模块,且使所述动能弹性件拉伸或释放;位置检测器,其连接于所述悬臂,所述位置检测器用于检测所述释放模块滑动至所述动能弹性件原长的位置,所述位置检测器、所述牵引模块、所述释放模块、所述滚转模块、所述俯仰模块、所述直线模块六者均与所述控制器电性连接。
4、在控制器的控制下,可以调节直线模块、滚转模块和俯仰模块,进而改变悬臂的高度、俯仰角度以及滚转的角度,尽可能的模仿飞行生物的实际姿态;旋转平台的水平摆角一般情况下不需要调节;扑翼机被释放模块夹持,因此当需要调节俯冲时,扑翼机也不会提前掉出;实际使用时,直线模块、滚转模块和俯仰模块提前改变悬臂的延伸方向,通过释放模块将扑翼机夹紧,牵引模块拉动释放模块朝后侧运动,此时动能弹性件呈拉伸状态,然后通过控制器控制牵引模块使动能弹性件释放动能给释放模块,释放模块在悬臂上朝前运动,扑翼机也同步超前运动,直至位置检测器检测到释放模块移动至动能弹性件原长的位置,此时释放模块松开扑翼机,扑翼机朝目标方向射出;即上述结构可以实现扑翼机基于控制器命令的多自由度自动调节,减少了人为因素在实验中的影响,也减少了多次重复试验时对人力的消耗,更进一步的,采用上述结构可以对扑翼机起飞高度、俯仰角度、滚转角度进行闭环控制,能提高发射的科学性。
5、作为上述技术方案的进一步改进,所述释放模块包括:支撑组件,其沿前后方向滑动连接于所述悬臂,所述动能弹性件的后端与所述支撑组件连接,所述牵引模块驱动连接所述支撑组件;触发板,其连接于所述支撑组件且与所述位置检测器配合连接;夹紧组件,其连接于所述支撑组件,所述夹紧组件用于夹紧所述扑翼机;驱动组件,其连接于所述支撑组件且用于驱动所述夹紧组件开合,所述驱动组件与所述控制器电性连接。
6、动能弹性件为支撑组件提供动能,使支撑组件沿悬臂向前运动,当触发板同步滑动至位置检测器时,位置检测器输出信号至控制器,此时控制器启动驱动组件,驱动组件控制夹紧组件呈释放状态,能及时将扑翼机释放。
7、作为上述技术方案的进一步改进,所述夹紧组件包括两个用于夹紧所述扑翼机的夹爪,两个所述夹爪均设置于所述支撑组件,所述驱动组件用于驱动两个所述夹爪开合。
8、夹紧组件为两个夹爪开合的形式较为简单,便于使用;且上述结构是利用两个夹爪的夹紧力将扑翼机夹紧,当扑翼机进行俯冲实验且处于发射前的状态时,夹紧组件也能稳定的夹紧扑翼机。
9、作为上述技术方案的进一步改进,所述夹紧组件还包括夹紧弹性件,所述夹紧弹性件连接于两个所述夹爪之间,所述夹紧弹性件用于拉紧两个所述夹爪相互靠近。
10、增设夹紧弹性件以增强两个夹爪之间的夹紧力,当扑翼机进行俯冲实验且处于发射前的状态时,夹紧组件也能稳定的夹紧扑翼机。
11、作为上述技术方案的进一步改进,所述支撑组件包括:下支撑架,其沿前后方向滑动连接于所述悬臂,所述动能弹性件的后端与所述下支撑架连接,所述驱动组件驱动连接所述下支撑架,所述触发板连接于所述下支撑架;上支撑架,其与所述下支撑架卯榫连接,所述夹紧组件和所述驱动组件连接于所述上支撑架。
12、上支撑架和下支撑架通过卯榫连接,其装配简单,便于安装。
13、作为上述技术方案的进一步改进,所述上支撑架或所述下支撑架设置有阻尼层,所述阻尼层对应卯榫连接的位置。
14、增设阻尼层,起到缓冲吸振的效果。
15、本发明还提供一种多自由度的扑翼机起降装置的检测装置,包括测试平台、视觉记录器、读数器、打标器、速度检测器以及所述的一种多自由度的扑翼机起降装置,所述速度检测器连接于所述悬臂的前端且与所述控制器电性连接,所述架体位于所述测试平台的后侧。
16、打标器能实现理论落点的投射,通过一种多自由度的扑翼机起降装置将扑翼机发射至测试平台上,读数器可以通过人力在测试平台外推动且对准实际落点和理论落点进行读数;视觉记录器则用于记录扑翼机实际飞行时的姿态;速度检测器用于检测扑翼机发射时的速度。
17、作为上述技术方案的进一步改进,还包括连接于所述释放模块的姿态检测器,所述姿态检测器与所述控制器电性连接。
18、姿态检测器能测量释放模块的实际姿态。
19、作为上述技术方案的进一步改进,所述打标器包括:转台,其转动连接于所述架体,所述转台的转动轴线沿左右方向设置;打标电机,其连接于所述架体且用于驱动所述转台转动,所述打标电机与所述控制器电性连接;打标灯具,其连接于所述转台。
20、控制器根据预设的落点解算打标器需要到达的高度,然后通过控制器控制打标电机,打标电机根据指令输出相应的脉冲信号从而驱动转台转动,致使打标灯具转动至目标位置。
21、作为上述技术方案的进一步改进,所述位置检测器、所述速度检测器均与所述悬臂呈可拆卸连接。
22、位置检测器和悬臂为可拆卸连接,即位置检测器的位置可调节,可以补偿位置检测器电平反馈、控制器处理到驱动组件响应夹爪松开之间的时间延迟误差,以及释放模块多次实验后的动能弹性件老化、轻微的刚性恢复误差;速度检测器和悬臂为可拆卸连接,即速度检测器的位置可调节,当扑翼机被释放后,仍有一段时间才能开启自主运动模式,而实际测试速度的点尽可能是扑翼机开始自主运动的位置,因此位置检测器的位置可调,可用以补偿误差。
- 还没有人留言评论。精彩留言会获得点赞!