一种用于大型空间展开机构的智能跟随气浮车
本发明涉及一种智能跟随气浮车,具体涉及一种三维空间智能跟随功能的气浮车,属于航天机械结构领域。
背景技术:
1、随着空间科学技术的不断发展,无论是近地导航还是深空探测,航天器的研发频率越来越高,系统功能越来越复杂,验证新技术新方案的频次越来越多。然而,航天器的技术风险性高、系统功能复杂、发射成本较高、试验失败损失较大,为了尽可能降低航天器发生故障或失效造成的损失,保证航天器的高可靠性尤为重要。因此,在地面进行尽可能多的基于空间环境的试验模拟是发射任务成功的基本保障。其中较为关键的是地面模拟微重力环境,目前可大致分为地面托举式和悬吊式两种方案。
2、悬吊式方案虽然布置起来更加灵活,但是对于大型空间展开机构往往存在尺寸大,运动复杂的特点。为了满足这类展开机构的展开需要,悬吊式方案需要加工大型磁性基座成本高昂显得较不适宜。若直接采用大型气浮平台尺寸必须足够大,往往需要多块小型平台拼装组成,这对平台的加工和安装均提出了苛刻的技术要求,并且在相邻两块小型平台的接缝处容易产生卡滞现象,影响待试验机构的正常运动。为了满足大型空间展开机构复杂运动的需要,其随动工装一般结构复杂且质量过大,有时甚至为展开机构自身质量的数倍以上,这必然会对展开机构引入较大的附加阻力和附加阻力矩,严重影响试验的精度和准确性。因此,有必要设计一种智能跟随气浮车以解决上述问题。本发明是发明专利[空间智能跟随气浮台,申请号:201010257031.7]的后续专利。依附于先前专利,在上一代空间智能跟随气浮台基础功能的要求下进行了升级改造,设计了一种智能跟随气浮车以满足大型空间展开机构的实验要求。
技术实现思路
1、针对现有技术中存在的如下问题:(1)加工大型气浮平台或大型磁性基座成本高昂;(2)小型气浮平台拼接在接缝处容易出现卡滞;(3)随动工装结构比较复杂且质量过大给大型空间展开机构引入较大的附加阻力和附加阻力矩,严重影响地面微重力模拟实验的精度。本发明主要目的是提供一种用于大型空间展开机构的智能跟随气浮车,能够在三维空间上智能跟随大型空间展开机构的运动,从而抵消被测实验对象的重力。本发明无需加工大型气浮平台或磁性基座,既能够满足在地面实验室环境下模拟外层空间力学环境的要求,又不会对展开机构引入过多的附加阻力及附加阻力矩,提高大型空间展开机构地面试验的精度和准确性。
2、本发明的目的是通过下述技术方案实现的:
3、本发明公开的一种用于大型空间展开机构的智能跟随气浮车,包括重力卸载子系统、智能跟随子系统、气源组件和测控子系统。
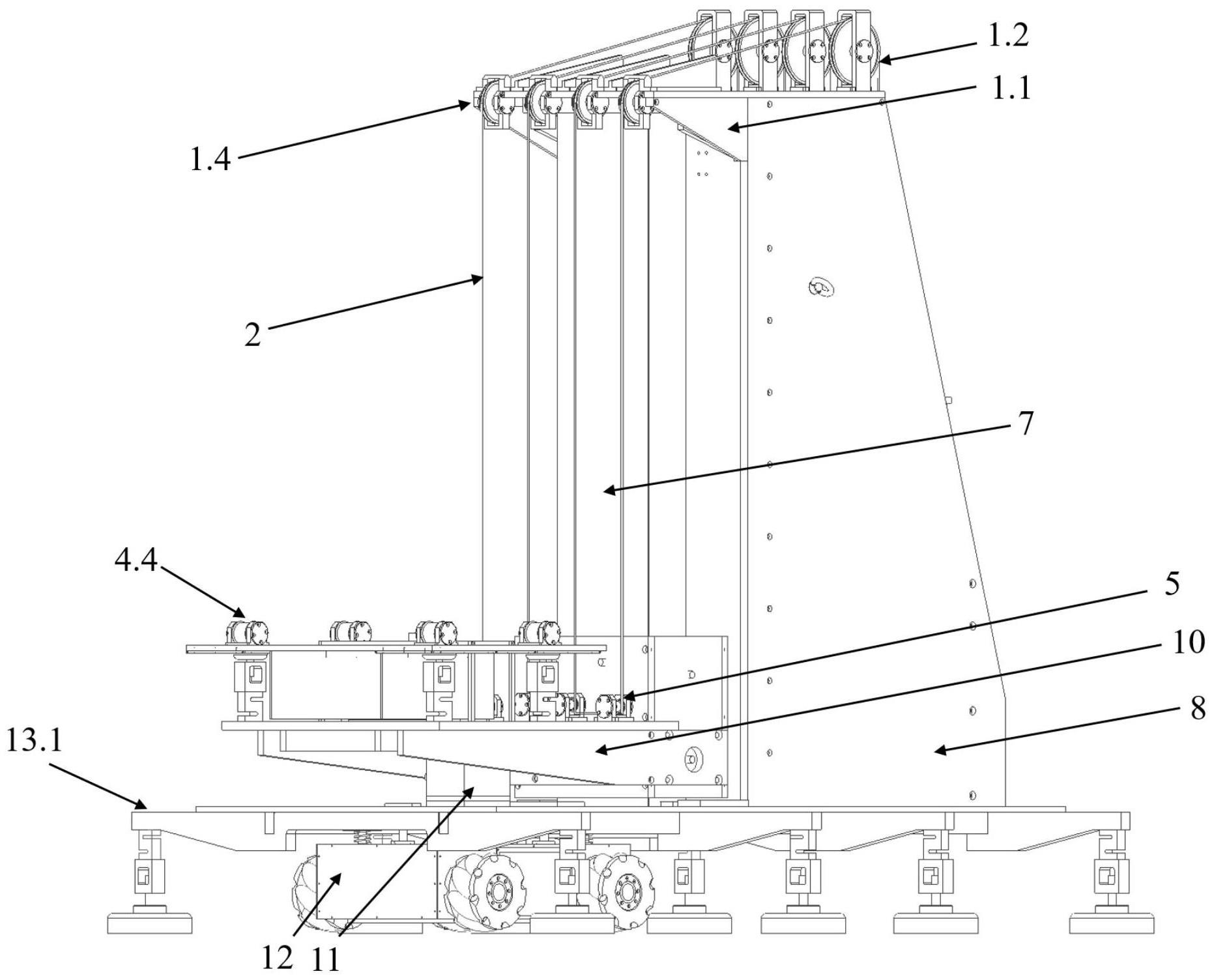
4、智能跟随子系统包括气浮板后限位条、倾角传感器、气浮板前限位条、支撑辊子、激光传感器转接板、激光传感器、激光传感器安装板、激光传感器遮光板、上层气足限位块、上层气足、上层力传感器转接工装、上层力传感器、组合托架、丝杠升降台、麦克纳姆车、气浮支撑平台、气浮支撑平台加强筋、下层力传感器、下层力传感器转接工装、下层气足、丝杠、手摇轮、前光轴安装条、麦克纳姆车电气接口、麦克纳姆轮、升降梁、铜套、气浮支撑平台光轴、麦克纳姆车弹簧、麦克纳姆车弹簧杆上盖、后光轴安装板。
5、重力卸载子系统包括定滑轮加强筋、大定滑轮、顶端上方加强筋、小定滑轮、顶端下方加强筋、绳索、气浮滑块、滚轮、组合托架防撞块、气浮导轨、立柱、立柱吊环、配重箱吊环、配重、配重限位块、配重箱弹簧杆端盖、竖直导轨连接板、配重箱弹簧、竖直导轨滑块、立柱后板、竖直导轨、配重箱防撞块。
6、气源组件包括空气过滤器、减压阀、油雾器和供气源。
7、测控子系统包括上位机即人机交互模块和下位机即智能跟随控制模块。
8、所述智能跟随子系统包含x1个支撑辊子,x1个支撑辊子对称安装在组合托架的上面,其中x1≥4。
9、所述智能跟随子系统包含x2个激光传感器遮光板,x2个激光传感器遮光板两两相互垂直的安装,其中x2≥2。
10、所述智能跟随子系统包含x3个激光传感器,x3个激光传感器通过激光传感器转接板固定在激光传感器安装板上面,其中x3≥3。测控子系统通过获取x3个激光传感器与激光传感器遮光板之间的距离,并进行计算得出平面内物体运动过程中的平移量和旋转量,再将平移量和旋转量解算转换为麦克纳姆车的驱动信号,从而带动智能跟随气浮车运动。所述麦克纳姆车内部包括电机、多级减速器、编码器、ad采集板、传动轴和控制模块。
11、所述激光测距的原理如下:
12、根据几何关系
13、d2-l2=d3 cosα-l3+(d3 sinα-x23)tanθ (1)
14、得出任意旋转角度
15、
16、其中:θ为组合托架旋转的任意角度,α为2号和3号激光传感器的安装角度,l2为2号激光传感器与1号激光传感器安装的垂直距离,l3为3号激光传感器与1号激光传感器安装的垂直距离,x23为2号激光传感器与3号激光传感器安装的水平距离。
17、所述智能跟随子系统包含x4套上层气足限位块、上层气足、上层力传感器转接工装和上层力传感器,其中x4≥3。上层力传感器、上层力传感器转接工装、上层气足按从下之上的顺序安装在组合托架的上面,为防止组合托架发生倾覆还设置了机械限位保护气浮板前限位条、气浮板后限位条和上层气足限位块,其中,气浮板前限位条和气浮板后限位条布置在组合托架的两侧。
18、所述智能跟随子系统包含x5套下层力传感器、下层力传感器转接工装和下层气足,其中x5≥3。下层气足、下层力传感器转接工装、下层力传感器按从下之上的顺序依次安装均固连在气浮支撑平台的气浮支撑平台加强筋上,气浮支撑平台的前端通过气浮支撑平台光轴和丝杠与麦克纳姆车相连。所述气浮支撑平台采用气浮原理利用下层气足将整个智能跟随气浮车从地面托起,使两者之间形成气膜,以达到零重力实验的目的。通过手摇轮调节丝杠的上下运动控制麦克纳姆车的升降,进而实现智能跟随气浮车主动模式和被动模式的切换。其中被动模式需要调节手摇轮使麦克纳姆车升起脱离地面,智能跟随气浮车在下层气足的作用下浮于地面,被动跟随大型空间展开机构的运动而运动;主动模式需要调节手摇轮使麦克纳姆车与地面接触且还需与地面保持固定的预压力,以防止麦克纳姆车在跟随运动的过程中发生打滑现象,在主动模式下根据激光传感器的反馈信号,通过测控子系统解算转换为麦克纳姆车的驱动信号,进而驱动智能跟随气浮车主动跟随大型空间展开机构的运动。
19、所述测控子系统通过获取x4套上层力传感器和x5套下层力传感器的信号进行计算,并将计算后的数据回传到上位机,上位机实时显示接收到的数据并把数据存储到数据库中,通过对数据库中的数据进行分析可以得出大型空间展开机构的卸载效率。
20、所述重力卸载子系统包含x6套小定滑轮、大定滑轮、配重箱吊环和滚轮,其中x6≥2。小定滑轮和大定滑轮分别固定在立柱顶端的两侧,配重箱吊环安装在配重箱上面,滚轮安装在组合托架的内侧,滚轮、小定滑轮、大定滑轮、配重箱吊环通过绳索依次连接,进而实现配重箱和组合托架的联动。
21、所述重力卸载子系统包含x7个气浮滑块,x7个气浮滑块均布在气浮导轨的前后两侧,进而实现组合托架在x7个气浮滑块的作用下沿着气浮导轨的上下运动,其中x7≥2。
22、作为优选,在配重箱周边布设缓冲装置,通过缓冲装置减小智能跟随气浮车在运动过程中配重箱的震动,提高地面微重力模拟实验数据的准确性。所述缓冲装置为配重箱弹簧、竖直导轨滑块、竖直导轨或者采用液压缓冲装置。
23、作为优选,配重箱内的配重选择使用多个薄钢板,通过增加或减少薄钢板的数量以配平组合托架一端的质量,提高智能跟随气浮车适配不同空间展开机构的能力。
24、作为优选,下层气足、气浮导轨、气浮滑块、上层气足和支撑辊子应设置防尘装置。
25、作为优选,在气浮导轨的最下端设置有组合托架防撞块,同样地在竖直导轨的最下端也设置有配重箱防撞块,以避免组合托架和配重箱在上下运动至极限位置时与气浮支撑平台发生碰撞,此外还能缓冲因配重箱意外坠落时对气浮支撑平台的冲击。
26、作为优选,配重箱的绳索布置采用左右对称布局,即左右两侧的配重箱吊环与前端组合托架上面左右两侧的滚轮连接同一根绳索,同样地相对应的中间两个配重箱吊环与前端组合托架上面中间两个滚轮连接同一根绳索,通过改变绳索的长度使左右两侧的绳索主要承力,中间的绳索起到安全防护的作用。这种布局若出现意外导致其中一根绳索断裂,左右对称的悬挂布局使得另一根绳索作用的合力仍然竖直向上,防止配重箱发生倾斜或坠落的危险。
27、作为优选,所述组合托架的顶端安装有倾角传感器,通过调节上层力传感器转接工装与上层气足之间的距离使组合托架保持在水平状态。避免由于组合托架未处于水平状态导致与空间展开机构所固连的试验件在重力的作用下产生偏移,增加实验过程中的附加阻力和附加阻力距,降低智能跟随气浮车的卸载效率。
28、本发明公开的一种用于大型空间展开机构的智能跟随气浮车的工作方式分为两种,分别为被动模式和主动模式。
29、智能跟随气浮车预先与大型空间展开机构固连,在被动模式下,调整气源组件关闭组合托架上面上层气足的供气开关,打开气浮支撑平台上面下层气足的供气开关,调节手摇轮使麦克纳姆车升起脱离地面,实现智能跟随气浮车被动跟随大型空间展开机构的运动而运动。在主动模式下,调整气源组件打开组合托架上面上层气足的供气开关,打开气浮支撑平台上面下层气足的供气开关,反向调节手摇轮使麦克纳姆车与地面接触并保持固定的预压力,以防止麦克纳姆车在跟随运动的过程中发生打滑现象,当大型空间展开机构开始运动时,与大型空间展开机构所固连的组合托架同步运动,此时激光传感器、上层力传感器和下层力传感器的数值开始发生变化并实时将它们的信号传递至测控子系统中,测控子系统通过ad采集板采集激光传感器、上层力传感器和下层力传感器的信号,通过解算转换为麦克纳姆车的驱动信号,进行主动跟随大型空间展开机构的运动。当大型空间展开机构进行竖直方向的运动时,通过调整配重的数量来配平气浮导轨的摩擦力,从而实现大型空间展开机构的零重力实验。
30、有益效果:
31、1、本发明公开的一种用于大型空间展开机构的智能跟随气浮车,不在需要设计加工大型气浮平台或大型磁性基座而是利用智能跟随气浮车的上层气足、下层气足和麦克纳姆车实现跟随大型空间展开机构的运动,降低地面微重力实验的成本。
32、2、本发明公开的一种用于大型空间展开机构的智能跟随气浮车,采用丝杠和麦克纳姆车实现智能跟随气浮车的主动模式,减小大型空间展开机构随动工装的质量,进而减小大型空间展开机构在实验过程中的附加阻力和附加阻力矩,提高地面微重力模拟实验的精度。
33、3、本发明公开的一种用于大型空间展开机构的智能跟随气浮车,采用组合托架、气浮导轨、配重箱的协同作用实现大型空间展开机构在竖直方向运动的零重力卸载,此外还在配重箱及组合托架部位布设缓冲装置,减小智能跟随气浮车在跟随大型空间展开机构运动过程中的震动,具有运动平稳、卸载效率高的优点。
34、4、本发明公开的一种用于大型空间展开机构的智能跟随气浮车,依靠激光传感器、麦克纳姆车、气浮导轨、配重箱和测控子系统的协同作用实现对大型空间展开机构的三维空间智能跟随。
- 还没有人留言评论。精彩留言会获得点赞!