一种髋膝可驱动仿生着陆腿式六旋翼无人机及其控制方法
本发明涉及六旋翼无人机领域,尤其涉及一种髋膝可驱动仿生缓冲着陆腿式六旋翼无人机及其控制方法。
背景技术:
1、如今,多旋翼无人机的使用频率极高,使用领域广阔,在军事及民用领域均较广泛,特别是由于其突出的小巧、方便、易于操作的特点,其应用工作范围也越来越宽泛,但多旋翼无人机的使用条件常常受到各种自然地理条件的影响,在斜坡及凹凸不平的地面上起降时具有一定的局限性,对其任务的执行产生不利影响。
2、现阶段旋翼飞行器的起落架主要采取橇式起落架和支柱式起落架。且安装时主要采用固定安装在机身腹部的方式,结构相对固定,自由度低,虽然结构重量较轻,增加了续航能力,但却使得其针对复杂地形的适应力减弱,由于缺乏地形自适应的能力,在复杂地面进行起降时,往往需要操控人员根据经验和操控技术额外进行调控,大大增加起飞难度,当操作人员视线受阻无法得到多旋翼无人机的起降的地面信息时,甚至常会发生无人机无法降落或者侧翻损坏的事故。
3、为了解决复杂地形无人机难以完成起降落的问题,现有公布的无人机设计方案中,能够自适应地形的无人机种类较少,现有技术提供了如下方案:公开号为cn209274889u的《一种植保无人飞机复杂地形自适应起落架》中提出了一种采用四根独立伸缩的杆结构作为无人机起落架的地形自适应方案。这样的结构,就使得每个支腿只能改变足端的落点高度,不能改变足端落点的平面位置,在横向上的自适应能力并不出色。而本发明中使用的多关节双电机结构,一定程度上解决了着陆腿活动范围小的问题。
4、专利号为cn109204785a的《一种全地形自适应性无人机垂直起降起落架》中提出的全地形自适应起落架,其每个承载柱只能在导轨上移动,可移动范围有限,可以选择的落点因而也有限。本发明中提出的髋膝可驱动多关节双电机结构可以在较大范围内实时调整着陆腿的姿态,提升了无人机在凹凸不平和斜坡等自然环境下的着陆稳定性和安全性,同时通过三角形活动关节组,提高了无人机重量和下沉速度增大后的抗冲击能力。
5、因此,如何对无人机进行优化,使其可以满足复杂地形自适应起降落,就成为了本领域技术人员亟待解决的技术问题。
技术实现思路
1、本发明针对以上问题,提出了一种髋膝可驱动仿生缓冲着陆腿式六旋翼无人机,能够操纵仿生着陆腿大范围变形以满足复杂地形自适应起降,拓展了无人机的功能范围。
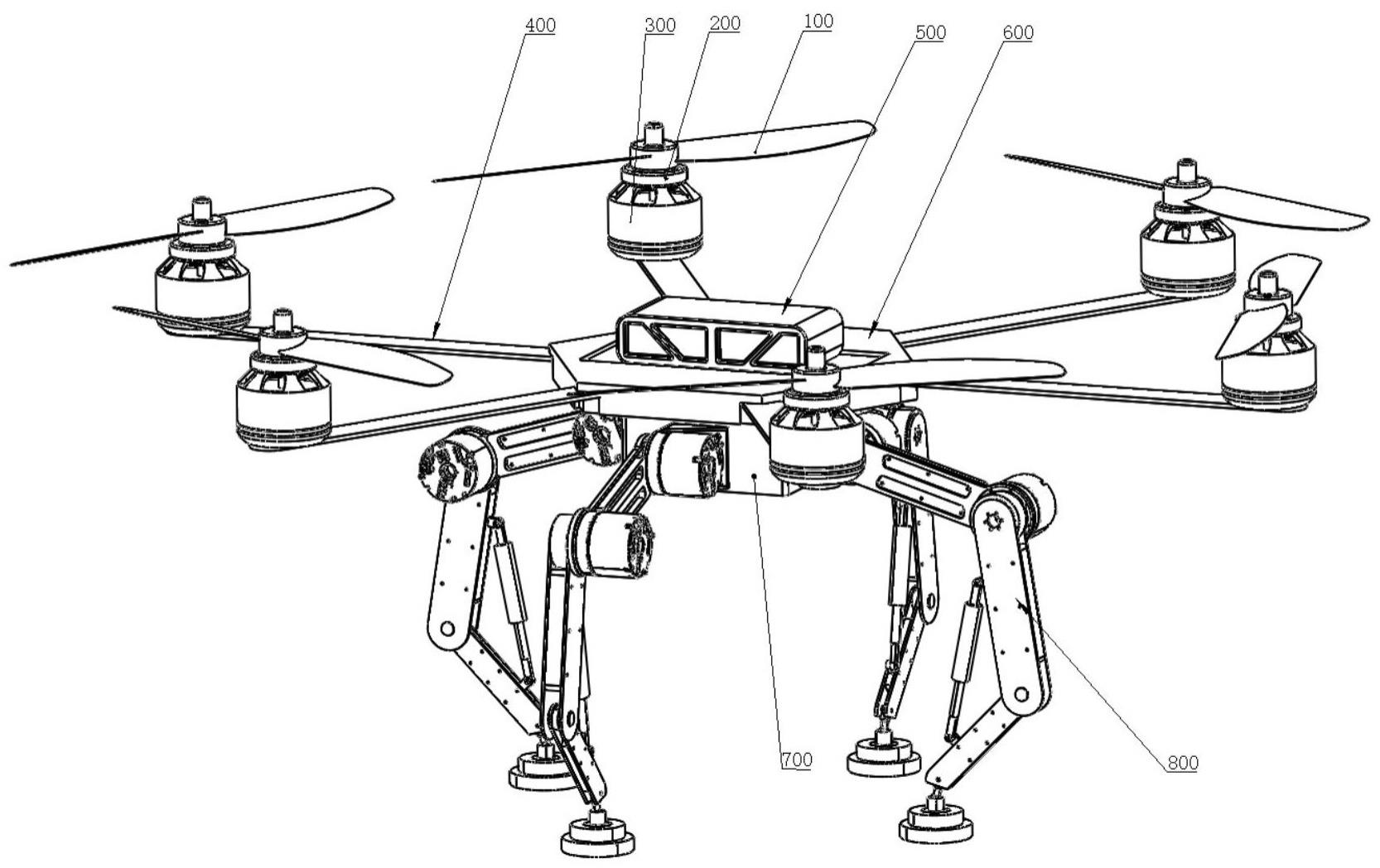
2、本发明的技术方案为:所述无人机具有安装平台700,在安装平台700上连接有四个仿生着陆腿800,所述仿生着陆腿800包括髋关节组、髋膝连接组、膝踝连接组、踝足连接组、足垫820以及髋关节电机803、膝关节电机807、缓冲器812;
3、所述髋关节组包括固定连接在安装平台700上的髋连接件802,所述髋膝连接组包括与髋连接件802铰接的髋膝连接件804,所述髋关节电机803的壳体固定连接在髋连接件802上,并且髋关节电机803的输出轴固定连接髋膝连接件804,通过髋关节电机803带动髋膝连接件804往复转动;
4、所述膝关节电机807的壳体固定连接所述髋膝连接件804,所述膝踝连接组包括平行设置且固定相连的膝踝连接件一808、膝踝连接件二810,所述膝踝连接件一808以及膝踝连接件二810的顶端同时铰接髋膝连接件804,并且同时与膝关节电机807的输出轴固定相连,通过膝关节电机807带动膝踝连接组整体往复转动;
5、所述踝足连接组包括平行设置且固定相连的踝足连接件一815、踝足连接件二817,所述踝足连接件一815及踝足连接件二817的顶端同时铰接膝踝连接组,所述缓冲器812的两端则分别铰接在膝踝连接组的中部以及踝足连接组的中部,通过缓冲器在膝踝连接组和踝足连接组相对旋转时,提供良好的支撑以及阻尼;
6、所述踝足连接件一815及踝足连接件二817的底端同时通过球铰连接足垫820。
7、进一步的,所述仿生着陆腿800具有髋关节、膝关节、踝关节三个关节,在髋关节组、髋膝连接组之间的连接位置形成髋关节,在髋膝连接组、膝踝连接组之间的连接位置形成膝关节,在膝踝连接组、踝足连接组之间形成踝关节。
8、关于髋关节的结构强度增强机构,所述髋关节组还包括髋连接加强件801,所述髋连接件802呈l字形,所述髋连接加强件801呈楔形,且固定连接在髋连接件802l字形的内侧顶角处。从而对髋连接件802的结构强度起到显著增强的作用。
9、关于髋膝连接组的结构强度增强机构,所述髋膝连接组还包括髋膝加强件一805、髋膝加强件二806,所述髋膝连接件804的两端分别铰接髋关节组以及膝踝连接组,所述髋膝加强件一805以及髋膝加强件二806则分别平行的固定连接在髋膝连接件804的两侧,并且髋膝加强件一805、髋膝加强件二806的两端也分别铰接髋关节组以及膝踝连接组。从而通过两侧的髋膝加强件一805、髋膝加强件二806对髋膝连接件804的连接稳定性、连接强度进行良好有效的补强,对于仿生着陆腿中受力最大的部件进行有效的强度补充。
10、关于膝踝连接组的结构强度增强机构,所述膝踝连接组还包括膝踝加强件一809、膝踝加强件二811,所述膝踝加强件一809呈圆盘状、且固定连接在所述膝踝连接件一808的顶端和膝踝连接件二810的顶端之间,并且膝踝加强件一809套装在膝关节电机807的输出轴上;
11、所述膝踝加强件二811呈长条形块状,且固定连接在所述膝踝连接件一808的中部和膝踝连接件二810的中部之间;从而通过膝踝加强件一809、膝踝加强件二811有效增强膝踝连接组整体的结构强度,并为缓冲器提供安装基础。
12、关于踝足连接组的结构强度增强机构,所述踝足连接组还包括踝足加强件816,所述踝足加强件816也呈长条形块状,且固定连接在所述踝足连接件一815的中部和踝足连接件二817的中部之间;从而通过踝足加强件816有效增强踝足连接组整体的结构强度,并为缓冲器及足垫提供安装基础。
13、进一步的,所述缓冲器812的缸体铰接所述膝踝加强件二811,所述缓冲器812的缓冲器活塞813则铰接所述踝足加强件816。
14、进一步的,所述球铰包括转动连接的球铰上段818和球铰下段819,所述球铰上段818固定连接在踝足加强件816的底部,所述球铰下段819则固定连接在足垫820上。
15、为了便于飞行器位置调整,设计基于pid控制方法的位置回路控制器;该控制器的输入为期望位置与反馈位置的差值;通过输出三个虚拟控制量、、实现对飞行器位置的控制;
16、,其中为方向制量,为方向控制量,为方向控制量;为比例环节系数,为积分环节系数,为微分环节系数。为位置反馈误差,具体表示如下:
17、,之后通过控制器输出的三个虚拟控制量以及期望偏航角求得期望升力及姿态角:,其中,为期望升力,为期望姿态角,为飞行器质量,为重力加速度;进而根据期望升力及姿态角调节电机转速,实现对飞行器的控制;
18、飞行器可根据控制器输出的虚拟控制量来计算期望力矩及升力,进而计算期望电机转速,变换关系如下:,其中~为旋翼支臂上六个马达的期望转速,为滚转力矩的期望力矩,为俯仰力矩的期望力矩,为偏航力矩的期望力矩,为期望升力,为旋翼轴距、为桨叶升力系数、为桨叶力矩系数。
19、本发明的有益效果是:
20、本发明采用仿生着陆腿的四足结构作为无人机的起落架,每个仿生着陆腿具有三个可活动关节,保证了仿生着陆腿的形状改变量,同时在足关节处还设置了一个三角形式缓冲关节组,保证了无人机起降落的稳定性和安全性,为大型无人机起降提供了保障。仿生着陆腿式起落架配合pid控制器可以更好的适配复杂地形的起降。四足的结构更加稳定,即使在一些坡度较大、凹凸度较大的地区也可以平稳着陆。
21、本发明采用电机调整腿部形状,在仿生着陆腿的髋关节和膝关节处设置了两个转动电机,仿生着陆腿具有多姿态变形功能,可以完成较高高度变化要求的自适应起降,拓展了无人机的功能范围。
22、本发明采用部件加强件的形式减轻结构重量,同时更有效的增加零部件的结构强度,同时在缓冲零部件的连接也通过加强件进行连接安装,增大了安装的灵活性。
23、本发明的优点在于通过髋膝可驱动的仿生着陆腿结构,提升六旋翼无人机在自然复杂地形环境下自适应起降的能力,拓展了无人机的环境适应性,同时缓冲关节组的使用使得大型无人机的起降强度要求得到满足。
- 还没有人留言评论。精彩留言会获得点赞!