一种样品捕获定向与转移装置及方法与流程
本发明属于航空航天领域,尤其涉及一种样品捕获定向与转移装置及方法。
背景技术:
1、随着航天技术的不断发展,对于未知样品的在轨回收是深空探测活动中一项关键性技术,已成为各国宇航领域研究的重点。火星样品返回任务是未来十年深空探测首要的工程项目。
2、受限于火星表面起飞的能力,携带火星样品及容器进入环火轨道的平台质量有限,无法采用传统的对接机构形式完成样品转移任务,只能通过在轨道器上配置样品容器捕获转移装置系统,捕获上升器释放的样品容器,并将其转移至返回器内。作为任务关键环节,nasa jpl在过去几十年一直在开展火星样品捕获定向系统研究,提出了十多种系统方案。nasa jpl的样品捕获与定向系统采用捕获盖将样品容器约束在捕获空间内,采用转杯式定向机构进行样品容器姿态调整,然后采用转臂进行转移固定。提出的几种系统方案均采取模块化设计策略,实施了独立的功能与空间分区设计,但存在着占用结构空间多和重量大等缺点。
3、在cn113955160a中公开了一种可折展捕获装置及其操控方法,采用1个防逃逸盖和4个旋转扇面进行样品容器的捕获和夹持定位,但在样品容器进入捕获空间后存在较大姿态偏差时,该装置不能对样品容器进行姿态调整,也不能将样品容器进行转移等操作。
技术实现思路
1、本发明的技术目的是提供一种样品捕获定向与转移装置及方法,以解决样品容器问题。
2、为解决上述问题,本发明的技术方案为:
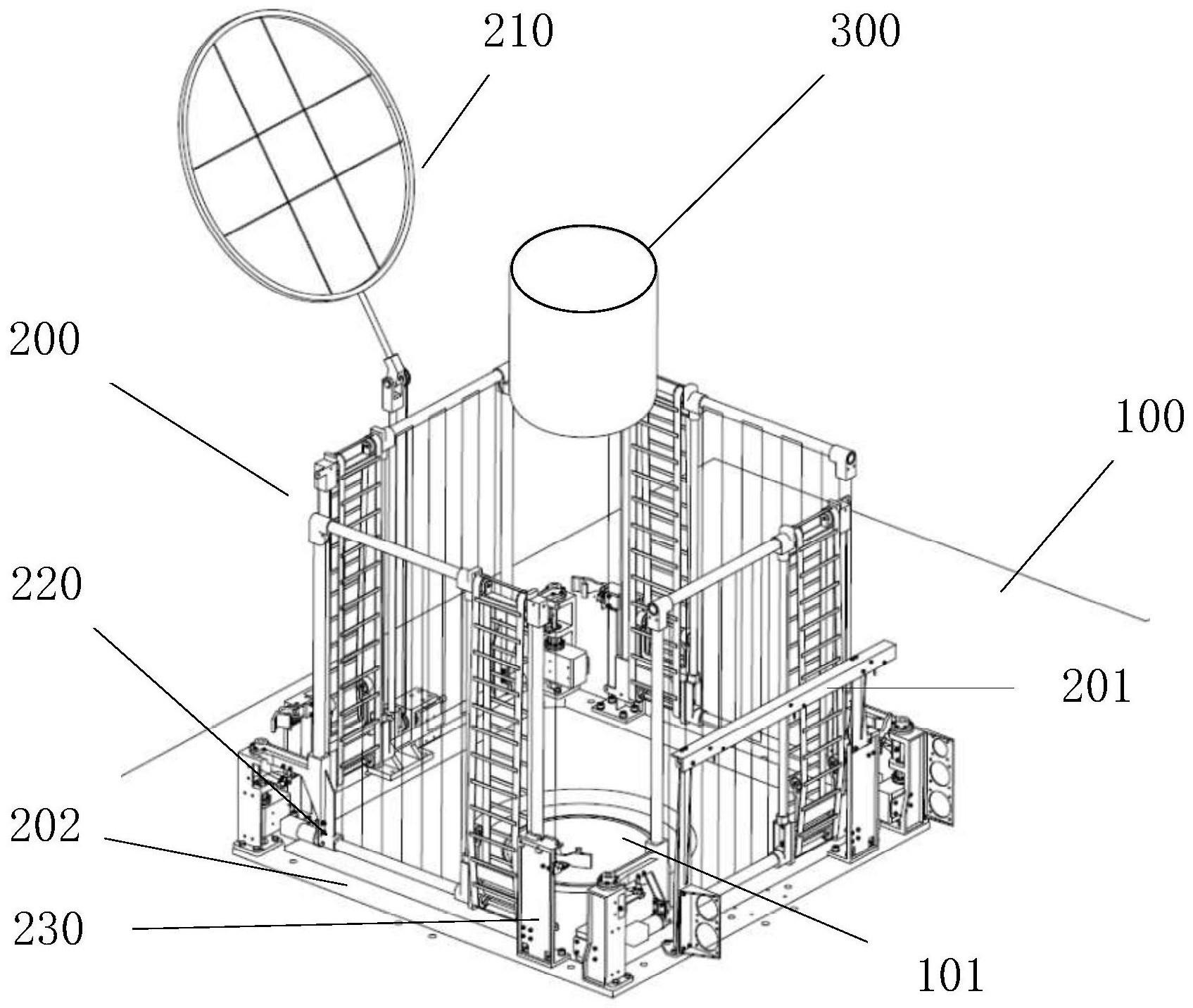
3、一种样品捕获定向与转移装置,安装于探测器的一侧平面上,该平面为安装平面,包括:四面扇面机构、闭合机构和探测单元;
4、四面扇面机构依次连接围拢成立方体空间,形成样品容器的捕获空间,扇面机构绕各自相对应的转轴旋转,用于逐步缩减捕获空间以夹持住送入捕获空间内的样品容器;
5、扇面机构上均设有传送带,传送带垂直于安装平面设置,用于对夹持住的样品容器实现姿态调整并放入封装桶内;
6、封装桶为安装平面上开设的凹槽,用于放置样品容器,封装桶位于捕获空间的中心;
7、闭合机构安装于其中一扇面机构上,用于遮盖捕获空间的上方,防止样品容器脱离样品捕获定向与转移装置;
8、探测单元设置于扇面机构的外侧,用于感知样品容器以配合扇面机构实现捕获。
9、进一步优选地,还设有安装底板,安装底板安装于安装平面上,用于安装四面扇面机构;安装底板的中心位置开设有与封装桶的开口相对应的通孔,可令样品容器通过。
10、具体地,扇面机构包括扇面驱动单元、扇面转轴、传送带驱动电机、网绳、传送带轮传送带、扇面框架和锁定机构;
11、扇面框架为矩形框架,网绳沿竖直方向安装于扇面框架内;
12、扇面驱动单元安装于扇面框架的一竖杆的底部,并安装于安装底板上,扇面转轴穿设于扇面驱动单元设置,扇面驱动单元用于带动扇面机构绕扇面转轴转动;
13、传送带驱动电机安装于扇面框架的下横杆的一端,靠近扇面驱动单元设置,传送带轮设于下横杆的另一端,并与传送带驱动电机经转轴转动连接,传送带沿竖直向跨过扇面框架的上、下横杆形成闭环状,传送带驱动电机用于驱动传送带轮转动,以配合控制传动带传动;
14、锁定机构安装于安装底板上,用于对扇面机构进行锁定。
15、具体地,闭合机构包括闭合电机、传动钢丝绳和轻质盖;
16、闭合电机设于扇面机构上,传动钢丝绳分别套设于闭合电机的转轴以及轻质盖延伸出的转轴上,闭合电机用于带动传动钢丝绳以控制轻质盖打开或闭合。
17、可选的,传送带也采用沿着传动方向并排布置的滚轮替代,该些滚轮同步转动来实现传送带的功能。
18、一种样品捕获定向与转移方法,应用如上述的样品捕获定向与转移装置,包括如下步骤:
19、s1:解锁释放扇面机构,闭合机构解锁后运动到准备合盖位置,打开捕获空间入口;
20、s2:通过探测单元感知样品容器,若探测到样品容器则启动闭合机构,将样品容器包围到捕获空间内实现捕获;
21、s3:扇面驱动单元以电流控制模式实现扇面机构地同步收缩,将样品容器夹持定位于中心位置,直至扇面驱动单元的工作电流大于预设门限值后,进入步骤s4;
22、s4:检测扇面机构的转角是否均大于预设阈值角度,若是则进入步骤s5,否则控制扇面机构使样品容器调整回正;
23、s5:通过扇面机构的传送带以带动样品容器转运至封装桶内。
24、其中,在步骤s4中,控制扇面机构使样品容器调整回正的步骤具体为:
25、s41:选取一组互为对立面的两面扇面机构为第一扇面组,保持电流控制模式,持续收拢并保持;
26、s42:另一组互为对立面的两面扇面为第二扇面组,令第二扇面组朝外转动一定角度,例如1°,以释放样品容器;
27、s43:令第一扇面组以相同的速度正反转,直至第一扇面组的转角均大于或等于夹持角度,例如30°,其中,在夹持角度下能够对样品容器施加夹持力,且传送带运动距离小于预设阈值,若是则第一扇面组停止转动,并令第二扇面组以电流控制模式收拢并保持,否则认定异常;
28、s44:令第一扇面组朝外转动一定角度,例如1°,以释放样品容器;
29、s45:令第二扇面组以相同的速度正反转,直至第二扇面组的转角均大于或等于夹持角度,例如30°,且传送带运动距离小于预设阈值,若是则第二扇面组停止转动,并令第一扇面组以电流控制模式收拢并保持,结束调整回正,否则认定异常。
30、其中,在步骤s5中,通过扇面机构的传送带以带动样品容器转运至封装桶内的步骤具体为:
31、s51:令所有扇面机构以电流控制模式收拢并保持;
32、s52:反向转动所有传送带以将样品容器朝封装桶运输:
33、s53:实时检测样品容器是否到位,若到位则停止传送带并结束转运;若未到位,则检测样品容器是否停止运动,若未停止则继续转运,若停止则认定为转运异常。
34、其中,在步骤s5中,认定为转运异常后,令传送带正向转动,再反向转动后回到步骤s53。
35、其中,在步骤s5中,认定为转运异常后,传送带持续反向转动,令第一扇面组或/和第二扇面组朝外部方向作轻微摆动,再回到步骤s53。
36、进一步优选地,还包括s7:将样品容器转移到位后并锁定,传送带停止运动,扇面机构回复到初始位置。
37、本发明由于采用以上技术方案,使其与现有技术相比具有以下的优点和积极效果:
38、本发明的装置采用4面可旋转的扇面机构来实现样品容器捕获、夹持定位,并由传送带实现样品容器姿态回正与转移,实现了样品捕获、定向与转移功能的一体化集成,具有功能集成度高、空间利用率高的优点;
39、另外针对装置提出了相对应的捕获、转移方法,能够实现样品容器任意姿态调整与回正,在转移过程中能够消除样品容器卡滞问题,具有样品容器姿态回正适应性强、转移可靠性高、故障应对处理措施多等特点。
- 还没有人留言评论。精彩留言会获得点赞!