一种飞机监测结构受力变化的系统及其使用方法
本发明涉及飞机结构受力变化检测,尤其涉及一种飞机监测结构受力变化的系统及其使用方法。
背景技术:
1、国际贸易逐渐恢复,航空运输因为其快速安全的特点,成为货运商远距离运输选择之一。但随着上一代货运飞机退役的临近及上一代客改货项目的结束,部分货运航空公司和租赁公司认为机队中有一部分货机可能面临退役,届时货机机队的运力可能会出现不足。全货机占市场份额约为61%并逐渐增长,远高于早期趋势。
2、货运飞机主要从退役的客机通过改装而来,俗称“客改货”,而这种通过“客改货”而来的全货机,在改装时会对飞机的结构做很多拆解、替换、拆除和切割的工作,而施工过程中,对结构的变化要求非常严格。
3、目前现有保护方法,是在飞机底部放置固定支架,在周围固定几个观测点通过观测仪进行间隔检查。仅通过仪器观测是不能及时发现飞机结构的受力变化,若出现系统故障(例如保护装置中液压突然泄压,作动筒突然快速运动)和紧急情况(包括系统故障和外来因为的影响,例如飞机零件突然掉落)时,飞机结构可能已经产生了形变或受力发生了改变,这时候进行测量可能导致飞机结构的永久性损伤,同时现有的保护支架不能自动控制和实时检测飞机的受力状况,无法记录保护过程中的数据进行分析,判断问题发生部位,现有的保护装置作动相应数度慢,出现系统故障和紧急情况也不能对飞机进行有效的保护。
4、如何解决上述问题是本发明面临的课题。
技术实现思路
1、本发明的目的在于提供一种飞机监测结构受力变化的系统及其方法。
2、为了实现上述发明目的,本发明采用技术方案具体为:
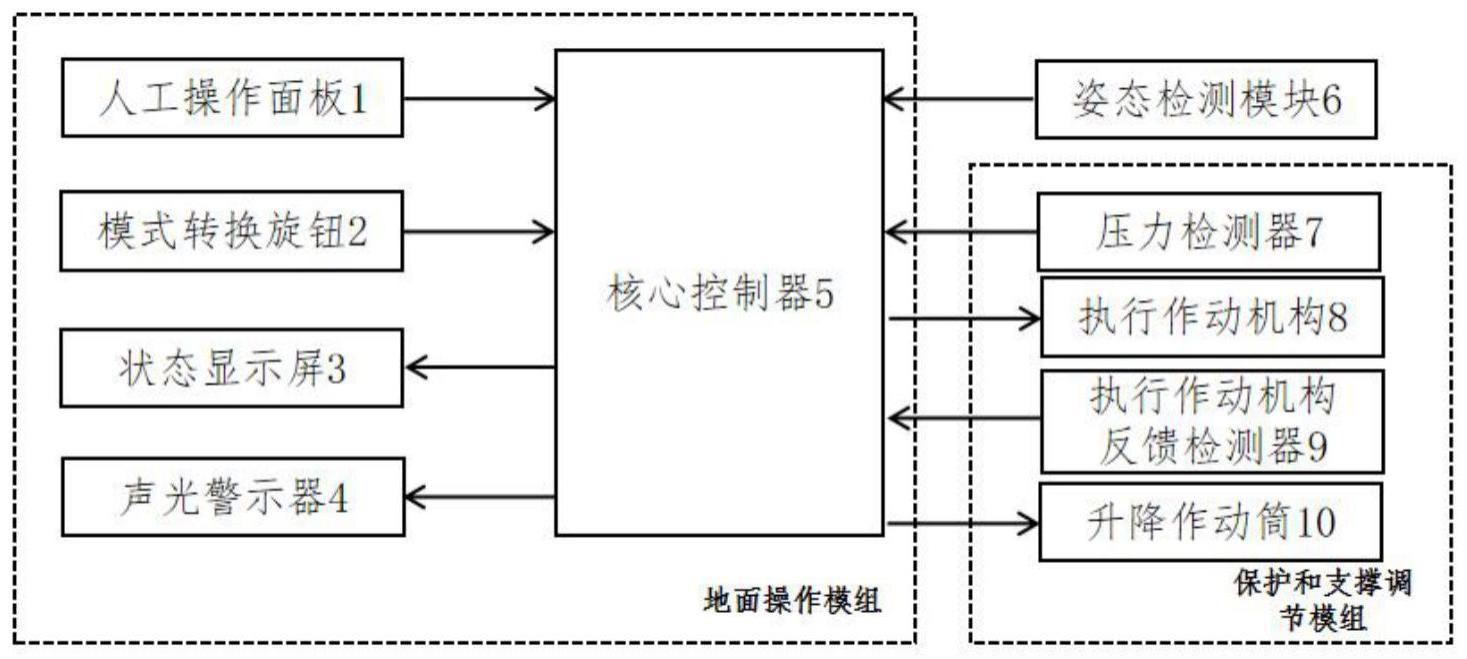
3、一种飞机监测结构受力变化的系统,包括:地面操作模组、多个保护和支撑调节模组和多个姿态检测模块;地面操作模组、多个保护和支撑调节模组和姿态检测模块通过无线信号连接;保护和支撑调节模组和姿态检测模块的数量根据飞机型号具体设置。
4、地面操作模组包含有人工操作面板、模式转换旋钮、状态显示屏、声光警示器、核心控制器;
5、模式转换旋钮与核心控制器电性连接,用于系统的人工、自动和紧急三种模式下的操作选择;
6、人工操作面板与核心控制器电性连接,仅当模式转换旋钮选择在人工模式下,通过人工操作面板操作保护和支撑调节模组;
7、当模式转换旋钮被人工选择在自动模式下,则由系统来控制保护和支撑调节模组;
8、紧急情况下,人工操作模式转换旋钮到紧急模式,系统根据事前设定的程序将护和支撑调节模组停止工作,并保持在当前状态,系统停止运作;
9、执行作动机构、升降作动筒;作动机构支撑锁定在当前位置。
10、状态显示屏与核心控制器电性连接,用于实时显示保护和支撑调节模组及姿态检测模块的各项工作参数;
11、具体包括飞机的俯仰值、倾斜值、压力检测模块的压力值、执行作动机构8、升降作动筒、固定式支撑、作动机构支撑的位置参数。
12、声光警示器与核心控制器电性连接,当系统参数超过一定阈值或系统故障时,将向外界发出声音和灯光;其中阈值设定为gb=gs-gy>200或俯仰值>0.02或倾斜值>0.02,灯光设置为红色,报警声为:“姿态变化,请监控”。
13、保护和支撑调节模组包含有压力检测器、执行作动机构、执行作动筒反馈检测器、升降作动筒;
14、压力检测器固定安装在执行作动机构的内部,执行作动筒反馈检测器的上端与执行作动机构固定连接,升降作动筒上端连接执行作动机构。
15、执行作动机构包含有固定式支撑和作动机构支撑,压力检测模块检测读取固定式支撑压力数据并给到核心控制器用于执行作动机构的工作控制;
16、姿态检测模块通过吸盘安装在机身上部,包含有倾斜传感器、俯仰传感器;两个传感器分别检测飞机的倾斜状态和俯仰状态参数并传输给核心控制器用于系统的控制。
17、一种飞机监测结构受力变化的使用方法,具体包括如下步骤:
18、s1:人工模式操作;
19、s2;调整飞机状态至重力原始状态;
20、s3:调整飞机状态至姿态原始状态;
21、s4:自动模式和系统故障的工作状态。
22、步骤s1具体包括:
23、将模式转换旋钮选择到人工模式,从维修仓库将升降作动筒移至飞机下方,通过人工操作面板手动遥控控制升降作动筒上升进而带动执行作动机构和飞机机身面贴合、执行作动机构反馈检测器采集升降作动筒的位移量并传递给核心控制器并实时显示在状态显示屏上;
24、步骤s2具体包括:
25、手动遥控控制升降作动筒将飞机顶升至轮胎脱离地面,此时固定式支撑承载飞机的重量、压力检测器读取当前的数据值并传输至核心控制器,核心控制器记录当前保护和支撑调节模组的各项参数,具体包括压力检测器的压力值、执行作动机构、升降作动筒、作动机构支撑的位置参数,固定式支撑记录的飞机重力;此时各项参数值在此系统中被称为飞机的重力原始数值,此时飞机受力均衡的,相当于在飞机在地面时的状态,称为重力原始状态。
26、步骤s3具体包括:
27、当飞机处于重力原始状态时,若飞机内部系统中的俯仰值、倾斜值水平读数均没有到零时,手动遥控控制升降作动筒使得飞机顶升,当飞机内部系统中的俯仰值、倾斜值水平读数均为零位时,停止控制,此时姿态检测模块中的倾斜传感器和俯仰传感器检测记录当前的飞机倾斜和俯仰数值传输至核心控制器,此时的参数值在此系统中被称为飞机的姿态原始数值,称为姿态原始状态。
28、飞机内部系统中的俯仰、倾斜数值为0,但是传感器读数不一定为0,但是姿态原始数值变化达到设定的阈值,系统就会工作。
29、步骤s4具体包括:
30、当飞机处于重力原始状态和姿态原始状态下,此时飞机的重力原始数值与飞机的姿态原始数值传输至核心控制器上,人工操作将模式转换旋钮选择到自动模式,系统转为自动控制,升降作动筒和作动机构支撑开始工作;即升降作动筒和作动机构支撑根据gb数值、姿态原始数值、gs与gy的比值的不同进行工作;
31、其中:gb=gs-gy;
32、式中,gb为结构受力变化量,gs为实时检测数据,gy重力原始数值,单位为kg,当gb值大于200且姿态原始数值不变时,作动机构支撑(12)将开始工作,使gb值≤200;飞机被撑起来后,上面有工作人员行走工作,正常情况下3个人的体重在200kg左右;
33、当姿态原始数值变化达到0.02时,不论gb值为多少,升降作动筒和作动机构支撑都将开始工作,直至姿态数值与姿态原始数值一致时停止工作;
34、飞机顶升至离地、倾斜俯仰值均为0后,一般是不会变化的,当姿态原始数值开始变化,直至≥0.02时,说明飞机姿态发生了变化会影响结构,这时就需要系统工作来纠正姿态。
35、系统自动将gs值与gy值对比,当gs与gy比值超过一定值时(即gs:gy=1.2),系统报警,报警的同时作动机构支撑再次工作,直至gs值达到gy值时停止作动;
36、当执行作动机构反馈检测模块检测到升降作动筒系统故障时,系统自动停止并运行并发出警报,此时人工操作模式转换旋钮选择到人工模式。
37、与现有技术相比,本发明的有益效果为:
38、1、本发明保护和支撑调节模组的数量可根据机型尺寸和类型可进行自由编组,根据工作需要进行灵活调整,无需间隔设置。
39、2、本发明能实时监测和显示飞机结构的受力变化以及受力趋势,解决了“客改货”施工过程中飞机结构容易变化无法进行监控和分析的问题。
40、3、本发明能够判断飞机结构受力突然变化发生部位,利用保护和支撑调节模组和声光警示器对飞机进行有效保护。
41、4、本发明升降作动筒和作动机构支撑能够根据gb数值、姿态原始数值、gs与gy的比值的不同进行工作,对飞机进行有效保护。
42、5、飞机在进行“客改货”施工过程中有时会出现系统故障或者紧急情况,此时人工操作系统停止工作,避免因系统的运动造成飞机的损伤。
- 还没有人留言评论。精彩留言会获得点赞!