一种遥感卫星对天指向姿态控制方法及计算机可读介质
本发明涉及遥感卫星控制系统领域,尤其涉及一种遥感卫星对天指向姿态控制方法及计算机可读介质。
背景技术:
1、对于高精度遥感卫星,几何定位和处理逐步摆脱对大量地面控制点的依赖,向稀少地面控制或无地面控制发展。其几何定位精度不仅仅取决于地面数据处理水平,更依赖于卫星的姿态确定精度,卫星姿态确定精度是确保影像几何质量的关键。
2、卫星在轨飞行阶段,由于姿态和轨道的变化,卫星受晒情况也随之变化,空间热环境的改变会使得星/地相机夹角产生微小角位移,给姿态确定引入了低频误差项,且难以通过地面定标的方式予以消除。在cn2021112828925中,公开了一种基于恒星观测的敏捷光学遥感卫星星/地相机夹角在轨标定方法,通过获取星/地相机对恒星成像后的图片,来确定星/地相机在惯性坐标系中的指向,进而获取二者之间的夹角。在进行几何标定时,由于地相机为线阵相机,需要控制卫星的姿态进行对天指向及推扫,将星/地相机同时对准恒星成像,并且避开太阳光以及地球反射的杂散光的影响,但cn2021112828925并未给出卫星对天推扫姿态控制的解决方法。
3、针对上述问题,在星/地相机的日/地遮蔽角多变量复杂约束条件下,根据星-地-日三者几何关系以及星/地相机安装角度,设计遥感卫星对天指向及推扫姿态控制策略和算法,是实现遥感卫星星/地相机夹角在轨标定必不可少的一环,具有重要的研究价值。
技术实现思路
1、为了解决上述技术问题,本发明提出了一种遥感卫星对天指向姿态控制方法及计算机可读介质。
2、本发明方法的技术方案为一种遥感卫星对天指向姿态控制方法,包括以下步骤:
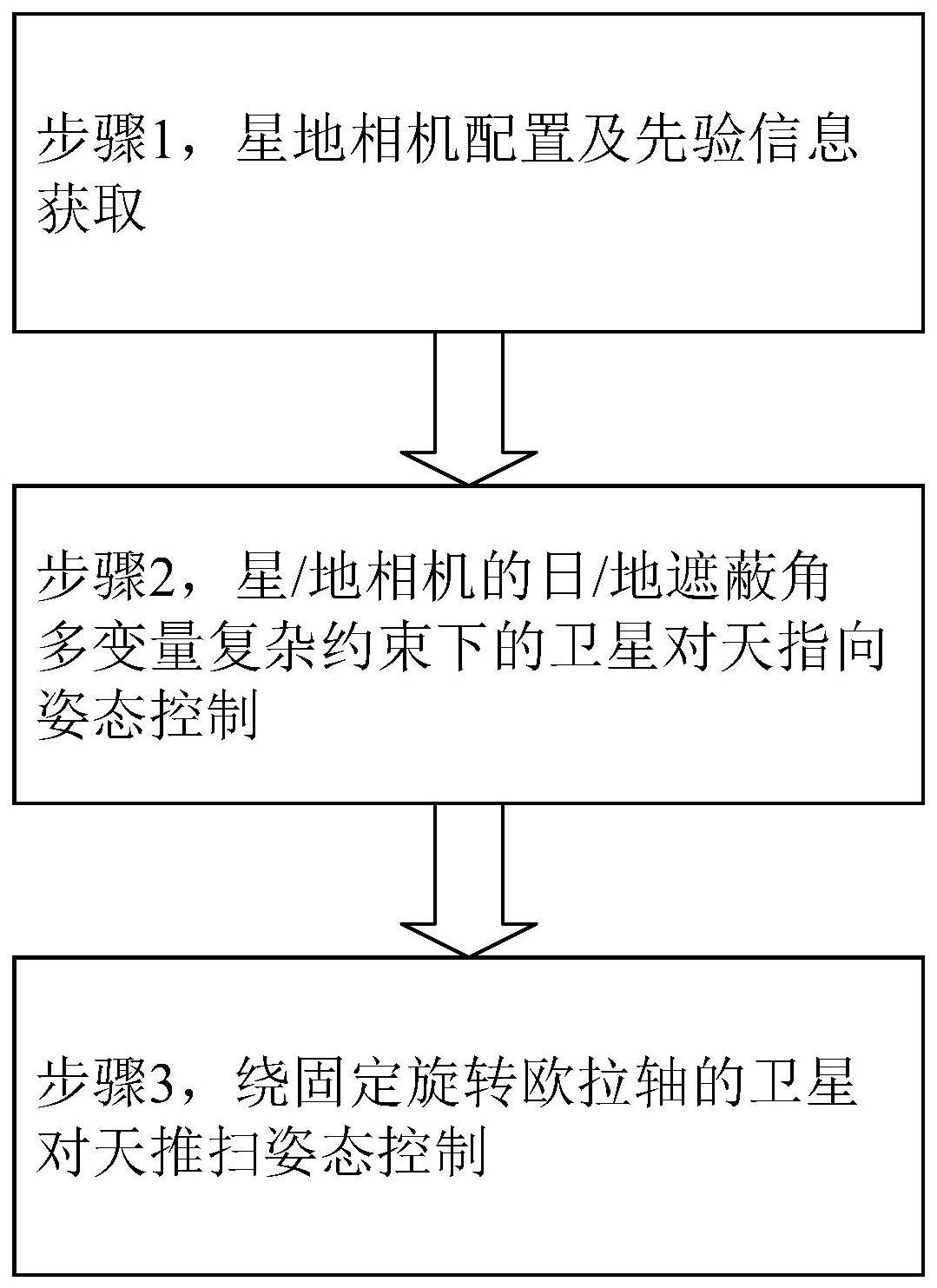
3、步骤1:获取星/地相机配置和先验信息,得到星相机的日遮蔽角、星相机的地遮蔽角、地相机的日遮蔽角、地相机的地遮蔽角,根据当前时刻和轨道信息,获取卫星指向地心的方向矢量、卫星指向太阳的方向矢量,获取地相机的安装矩阵、星相机a的安装矩阵、星相机b的安装矩阵;
4、步骤2:计算卫星对天指向时卫星本体系相对惯性系的期望姿态四元数,并实现卫星对天指向时姿态收敛;
5、步骤3:卫星对天指向姿态收敛后结合在轨标定的要求及约束,获取推扫角速度、推扫角方向以及推扫时长,并确定旋转欧拉轴,求解卫星对天推扫时卫星本体系相对惯性系的期望姿态四元数、卫星本体系相对惯性系的期望姿态角速度,卫星按照推扫角速度及时长进行对天推扫;
6、作为优选,步骤1所述星相机的日遮蔽角定义为:λst_sun;
7、步骤1所述星相机的地遮蔽角定义为:λst_earth;
8、步骤1所述地相机的日遮蔽角定义为:λcam_sun;
9、步骤1所述地相机的地遮蔽角定义为:λcam_earth;
10、步骤1所述卫星指向地心的方向矢量定义为:re;
11、步骤1所述卫星指向太阳的方向矢量定义为:rs;
12、步骤1所述卫星的地相机配置为地相机;
13、步骤1所述卫星的星相机配置为星相机a、星相机b;
14、步骤1所述地相机安装方位信息为光轴不严格指向卫星本体坐标系的+zb轴方向;
15、步骤1所述星相机安装方位信息为星相机a、星相机b关于卫星本体坐标系的oybzb平面不严格镜像对称,光轴均偏向+yb方向;
16、步骤1所述地相机的安装矩阵定义为:mb2cam;
17、步骤1所述星相机a的安装矩阵定义为:mb2sta;
18、步骤1所述星相机b的安装矩阵定义为:mb2stb;
19、作为优选,步骤2所述计算卫星对天指向时卫星本体系相对惯性系的期望姿态四元数具体如下:
20、步骤2.1:通过卫星精度测试获取地相机光轴在卫星本体坐标系的坐标rcam,星相机a光轴在卫星本体坐标系的坐标rsta,星相机b光轴在卫星本体坐标系的坐标rstb,星相机a光轴在卫星本体坐标系的oybzb平面上投影矢量rprojsta,星相机b光轴在卫星本体坐标系的oybzb平面上投影矢量rprojstb,星相机a、星相机b光轴在卫星本体坐标系的oybzb平面上投影矢量和的方向向量rprojstab,则:
21、rprojstab=(rprojsta+rprojstb)/||rprojsta+rprojstb||
22、其中,||||表示向量的二范数;
23、步骤2.2:考虑最大化光轴与卫星指向地心的方向矢量re、卫星指向太阳的方向矢量rs的夹角,令卫星姿态对天指向时,rprojstab与rcam及re共面,rprojstab、rcam构成的平面与re和rs构成的平面垂直,且rprojstab、rcam关于re和rs构成的平面镜像对称,rprojstab、rcam的夹角为:
24、θ=arccos(rprojstab·rcam)
25、其中,arccos表示反余弦,θ表示星相机a、星相机b光轴在卫星本体坐标系的oybzb平面上投影矢量和的方向向量与地相机光轴在卫星本体坐标系的坐标的夹角;
26、rcam与re的夹角为180°-θ/2、rprojstab与re的夹角为180°-θ/2;
27、rcam与rs的夹角大于θ/2,rprojstab与rs的夹角大于θ/2;
28、步骤2.3:rs和re构成的平面法向的方向向量为:||||表示向量的二范数;
29、将rcam在nse上投影为正、rprojstab在nse上投影为负定义为正向投影情况;
30、正向投影情况下,rcam在惯性系的方向向量可表示为:
31、
32、将rcam在nse上投影为负、rprojstab在nse上投影为正定义为负向投影情况;
33、负向投影情况下,rcam在惯性系的方向向量可表示为:
34、
35、正向投影情况下,卫星本体坐标系的x轴坐标轴方向向量、y轴坐标轴方向向量、z轴坐标轴方向向量在在惯性系的投影依次为:
36、
37、
38、
39、正向投影情况下,惯性系到卫星本体系的旋转矩阵为:
40、
41、令正向投影情况下卫星对天指向时,期望姿态四元数由旋转矩阵与四元数之间的关系可得:
42、
43、根据代数对应关系,可解的正向投影情况下卫星对天指向时卫星本体系相对惯性系的期望姿态四元数
44、负向投影情况下,卫星本体坐标系的x轴坐标轴方向向量、y轴坐标轴方向向量、z轴坐标轴方向向量在在惯性系的投影依次为:
45、
46、
47、负向投影情况下,惯性系到卫星本体系的旋转矩阵为:
48、
49、由正向投影情况下所述旋转矩阵与四元数之间的关系,以及代数对应关系,可求得负向投影情况下卫星对天指向时卫星本体系相对惯性系的期望姿态四元数
50、根据当前卫星姿态qi2b求得正向投影情况下期望姿态到当前姿态的误差四元数为:
51、
52、根据当前卫星姿态qi2b求得负向投影情况下期望姿态到当前姿态的误差四元数为:
53、
54、其中,()t表示四元数共轭转置,表示四元数乘法;
55、获取正向情况下误差四元数对应的欧拉角为δq+的标量部分;
56、获取负向情况下误差四元数对应的欧拉角为δq-的标量部分;
57、将正向情况下误差四元数对应的欧拉角、负向情况下误差四元数对应的欧拉角进行比较,较小欧拉角对应情况下的卫星对天指向时卫星本体系相对惯性系的期望姿态四元数作为最终姿态控制目标;
58、步骤2所述卫星对天指向时实现姿态收敛,具体如下:
59、姿态控制时需同时将卫星姿态和姿态角速度控制到期望值,即将卫星姿态控制到卫星本体系相对惯性系的期望姿态四元数对应的姿态,将卫星姿态角速度控制到期望姿态角速度ωbib_req,期望姿态角速度为0也作为控制目标;
60、卫星对天指向时,期望姿态相对于惯性空间不变,期望姿态角速度ωbib_req为零。
61、作为优选,步骤3所述获取推扫角速度、推扫角方向以及推扫时长,具体如下:
62、获取对天推扫时的推扫角速度ωr、推扫时长δt;
63、地相机为线阵相机,其推扫成像时要求推扫角速度方向沿着相机坐标系+yc轴方向;
64、步骤3所述确定旋转欧拉轴,具体如下:
65、推扫方向向量即旋转欧拉轴在相机坐标系投影为推扫方向向量在惯性系投影为:
66、
67、其中,表示四元数乘法;
68、步骤3所述卫星对天推扫时卫星本体系相对惯性系的期望姿态四元数,具体如下:
69、对天推扫开始时刻t0,卫星本体坐标系相对惯性系姿态四元数为
70、地相机的安装矩阵亦即旋转矩阵为mb2cam,再根据步骤2所述旋转矩阵与四元数之间的关系,可得卫星本体坐标系到相机坐标系的四元数为qb2c,地相机的相机坐标系相对惯性系姿态四元数为为
71、
72、推扫中的任一时刻t,可计算得到卫星转过的角度θp=ωr(t-t0);
73、可得卫星绕+yc轴方向转过θp角度的旋转四元数以及相机坐标系相对惯性系的期望姿态四元数
74、令qc2b=(qb2c)t,卫星本体坐标系相对惯性系的期望姿态四元数
75、步骤3所述求解卫星本体系相对惯性系的期望姿态角速度,具体如下:
76、根据对天推扫时的推扫角速度大小ωr及推扫角速度方向eyi,可得卫星期望角速度在惯性系投影为:
77、ωbii_req=ωr·eyi
78、将卫星期望角速度投影到地相机的相机坐标系得
79、其中,ωbii_req卫星期望角速度投影到惯性系;
80、将卫星期望角速度投影到卫星本体坐标系得
81、本发明还提供了一种计算机可读介质,所述计算机可读介质存储电子设备执行的计算机程序,当所述计算机程序在电子设备上运行时,执行所述遥感卫星对天指向姿态控制方法的步骤。
82、与现有技术相比,本发明的有益之处是:
83、本发明所述的星/地相机的日/地遮蔽角多变量复杂约束下的卫星对天指向姿态控制,可满足地相机与多台星相机同时成像的在轨标定需求,并且最大化了星/地相机光轴与地-星、日-星连线的夹角,避开了太阳光以及地球反射的杂散光对星/地相机成像的影响。
84、本发明所述的绕固定旋转欧拉轴的卫星对天推扫姿态控制,同时对卫星姿态角和姿态角速度进行了控制,相比于传统卫星角速度控制仅对姿态角速度进行控制的方案,其姿态控制精度更高,更适用于线阵地相机推扫成像后的遥感图像的处理。
85、本发明所述的一种应用于星/地相机夹角在轨标定的遥感卫星对天指向及推扫姿态控制方法,解决了线阵地相机与星相机同时对准恒星成像时的卫星姿态控制问题,攻克了基于星/地相机日/地遮蔽角及星-地-日间位置关系的复杂几何约束问题,满足了遥感卫星星/地相机夹角在轨标定的需求。
- 还没有人留言评论。精彩留言会获得点赞!