一种旋翼飞行器倾转结构
本发明涉及具备垂直起降和倾转飞行功能的一种旋翼飞行器倾转结构,属于旋翼飞行器。
背景技术:
1、目前垂起无人机已经广泛应用于深林救援、消防巡查等方面,然而市场应用场景不断拓宽,对无人机续航、抗风起降能力提出了更高要求。
2、传统无人机多采用“n+1”布局,即n个升力电机和一个推力电机组合方式,在飞机爬升阶段使用n个升力电机作为主要电机,保证飞机的姿态、偏航、滚转等稳定性,但是在遇到大风天气,容易控制升力超调,故不能在大风天很好控制,此外,在飞机爬升与降落阶段n个电机用电功率较大,n个旋翼在巡航阶段属于无用阶段,重量利用率不高,整理看来比较费电且载重利用率不高。
3、为了解决上述传统无人机多采用“n+1”布局的局限和问题,一种可以倾转旋翼的旋翼飞行器应运而生。其在升降、悬停时,旋翼呈水平布置;当转为巡航水平飞行时,将旋翼转至垂直布置;因此可以省去推力电机,充分利用每一个旋翼,从而省电且提高了载重利用率。
4、对于,倾转旋翼机而言,倾转机构是实现旋翼换向的关键,例如,公开号为cn113443136a的中国专利即公开了一种多连杆旋翼飞行器倾转机构及其工作方法,该倾转机构包括:设置于机体内的固定座、驱动单元和倾转单元,机体上开设有舱室,固定座设置于舱室的顶壁,机体上还设置有旋翼机构,倾转单元与旋翼机构之间通过支撑座连接,其中,倾转单元包括传动构件、推力构件和倾转构件,驱动单元与传动构件连接,推力构件连接驱动单元和支撑座,倾转构件与推力构件连接,并与固定座、支撑座连接,驱动单元控制传动构件带动推力构件转动,推力构件带动倾转构件沿与固定座转动,控制旋翼机构倾转运动。其中,所述传动构件采用蜗轮蜗杆传动机构,而推力构件和倾转构件为两组四连杆结构,即通过蜗轮蜗杆驱动多连杆结构联合运动的方式实现对倾转单元的控制。该倾转机构虽然倾转过程中的稳定性有所提提高,但是,众所周知,由于蜗轮蜗杆存在长时间快速往复运动磨损以及精度保持问题,当使用一段之间后,蜗轮蜗杆之间产生了间隙,无法保证其传动精度时,会导致倾转机构无法精准地保持在所需要的倾转角度,由于蜗轮蜗杆的间隙导致倾转机构在该角度的一定范围内(误差间隙)内摆动,由于旋翼处于高速运转中,该摆动即形成了快速抖动的现象,从而不能保持倾转过程、升降以及飞行过程的稳定性,不能保证长时间飞行的可靠性,进而降低无人机整体使用寿命,故该倾转机构不能满足飞机安全性与寿命要求。其存在的另一个问题是:由于倾转机构的倾转是通过两组四连杆结构的倾转实现的,其用于安装旋翼的支撑座的旋转是在空间进行的一个曲线状的转动,即其不仅进行了转动也进行了位移,因此其给倾转角度的控制增加了复杂性。同时,由于双四连杆结构的构件多,重量大,会增加飞行器的耗电量。
5、基于上述现有旋翼飞行器倾转机构的缺点,一种可以长时间在任意飞行状态下稳定控制旋翼倾转、且倾转角度容易控制的旋翼飞行器倾转机构成为本领域技术人员追求的目标。
技术实现思路
1、本发明的目的在于解决现有的旋翼飞行器倾转机构中传动机构磨损后导致其运行稳定性差、长期飞行可靠性差、进而降低其使用寿命的问题、以及精准控制倾转角度难度大的问题。
2、为实现上述发明目的,本发明的技术方案为:
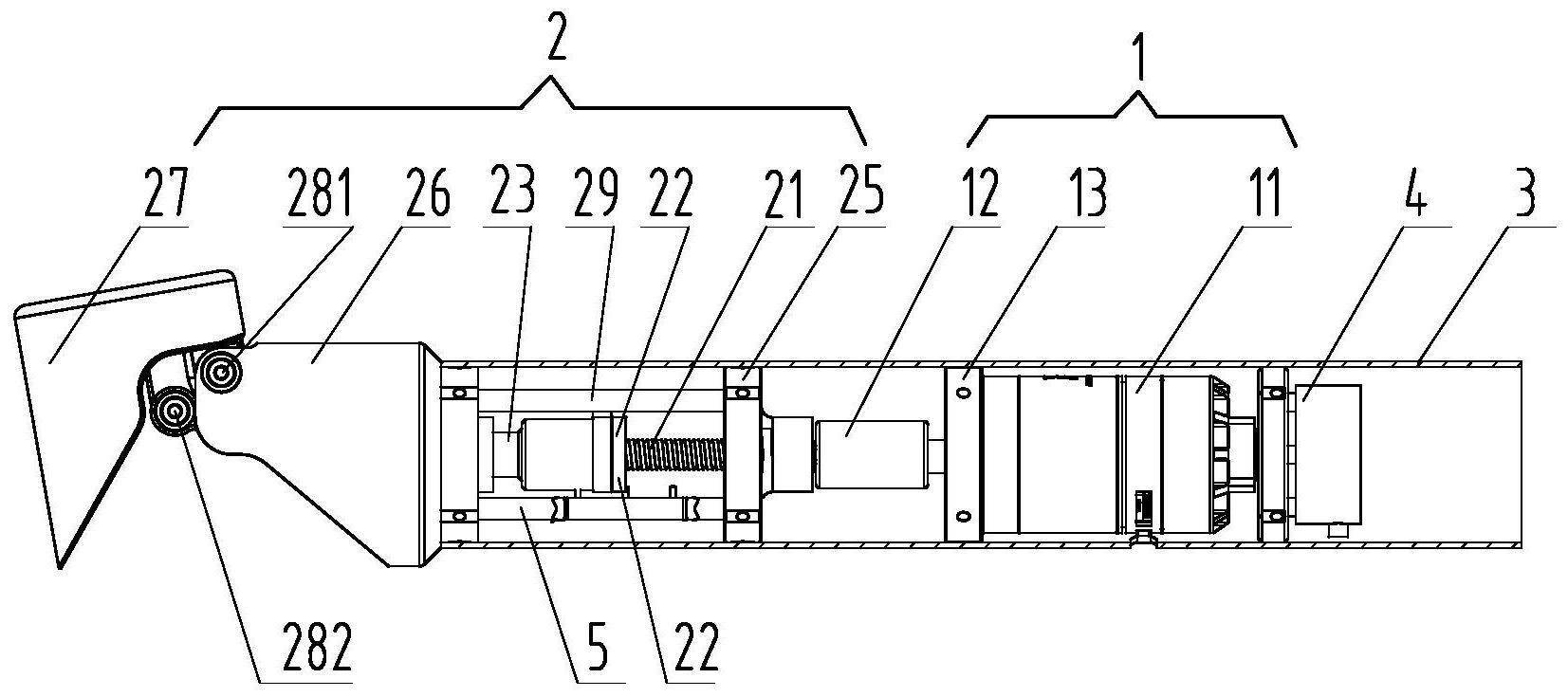
3、一种旋翼飞行器倾转结构,其包括驱动单元和倾转单元,其特征在于:所述驱动单元和倾转单元的后部依次沿直线布置在一个圆柱状的定位管中;所述倾转单元包括:
4、一个丝杆,所述丝杆的后端通过一个后端固定座安装在定位管中、且所述丝杆的后端与所述驱动单元直线连接;
5、一个螺母,螺接在所述丝杆上,且在所述丝杆驱动下可以做直线运动;
6、一个直推杆,所述直推杆的后端与所述螺母固定连接,且所述直推杆中心具有供所述丝杆自后端伸入的盲孔;
7、一个前端定位座,固定安装于所述定位管的前端,所述前端定位座中间具有一个供所述直推杆穿过的中心定位孔,所述前端定位座具有向前延伸的、圆柱状的第一延伸部,所述第一延伸部的上部的长度长于下部的长度,且所述下部的前端面呈上长下短的斜面状;
8、一个旋转底座,所述旋转底座包括一个位于前端的圆形的底座板和由底座板向后延伸、呈圆柱形、且与所述第一延伸部等径的第二延伸部,所述第二延伸部的上端为较短的上延伸部,所述上延伸部下面的下延伸部的端面为上短下长的斜面状;所述旋转底座的后端上部通过转轴一铰接于所述前端定位座的前端上部;
9、一个旋转关节,所述旋转关节一端与所述直推杆的前端部转动连接,另一端与所述旋转底座转动连接,用于推动所述旋转底座绕所述转轴一的中心在展开状态和闭合状态之间旋转。
10、作为优选方案,其中,所述丝杆为滚珠丝杆,所述螺母为滚珠螺母;或者:所述丝杆为t型丝杆,所述螺母为t型螺母。采用滚珠丝杆和滚珠螺母,其传动精度高而且耐磨性能好。采用t型丝杆和t型螺母,其传动精度高,可以通过涂润滑脂提高其耐磨性能。
11、作为优选方案,其中,所述旋转底座处于闭合状态时,所述第二延伸部的后端端面与所述第一延伸部前端端面吻合,所述旋转底座和前端定位座围成圆柱形形状。
12、作为优选方案,其中,所述第一延伸部的上部处具有两个转轴安装座,两个所述转轴安装座之间具有一豁口,所述转轴一可以转动地设在所述转轴安装座的转轴安装孔中;
13、在所述旋转底座内、靠近上延伸部处具有可以插入所述豁口中的第一连接耳,所述旋转底座的第一连接耳与所述前端定位座的两个转轴安装座之间的转轴一连接;在所述旋转底座上还设有第二连接耳,第二连接耳位于所述第一连接耳同一垂直面的下方位置;所述旋转关节与所述第二连接耳转动连接。
14、作为优选方案,其中,所述旋转关节的前后两端均为y形结构,在两端的所述y形结构处分别设有转轴二、转轴三;所述第二连接耳和直推杆的直推杆连接耳插入到所述旋转关节的两个y形结构的中间空挡处,与转轴二、转轴三连接在一起。
15、作为优选方案,其中,所述驱动单元包括驱动电机、联轴器和电机安装座,所述丝杆的后端通过联轴器与所述驱动电机直线连接;所述驱动电机通过电机安装座设置在定位管中;所述电机安装座包括为一个外径与所述定位管内径适配的环形架,环形架中央为一个圆形的用于安装电机的定位孔,在环形架上设有电机固定孔。
16、作为优选方案,其中,所述后端固定座包括一个外径与所述定位管内径适配的环形支架一和与所述环形支架一连为一体的定位套一,中心具有用于丝杆支撑、定位的后定位孔,所述丝杆的后端穿过该后定位孔与所述联轴器对接。
17、作为优选方案,其中,所述前端定位座的后端具有与所述定位管内径适配的环形支架二,所述环形支架二通过螺钉固定在定位管内,所述环形支架二中间具有一个与所述环形支架二连为一体的定位套二,用于支撑所述直推杆的所述中心定位孔位于所述定位套二中心位置。
18、作为优选方案,其中,所述直推杆的后端具有一个法兰,所述法兰通过螺钉连接于螺母的前端面。
19、作为优选方案,其中,其进一步包括一个导向机构,用于使所述直推杆和螺母在所述丝杆驱动下做直线运动;所述导向机构包括一个导轨,所述导轨设置在前端定位座和后端固定座之间,所述导轨中间为一个与所述丝杆、直推杆平行的滑道;
20、一个滑动件设在所述直推杆的法兰的外缘上,所述滑动件的上端延伸至所述滑道中、且在所述滑道中导向定位。
21、作为优选方案,其中,所述导轨的两端与前端定位座和后端固定座连接;在直推杆的法兰的外缘上具有一个弦切面,所述滑动件设在所述弦切面上;滑动件采用滚动轴承。
22、作为优选方案,其中,所述电机固定座位于所述电机固定孔的周围具有减重凹槽;所述后端固定座的环形支架一上设有减重孔一;所述前端定位座的环形支架二上具有减重孔二。
23、作为优选方案,其中,其进一步包括一个用于当旋转底座处于前飞状态时、保持旋转底座处于闭合状态的自锁单元,所述自锁单元包括一个电子阻尼器,所述电子阻尼器安装在所述定位管的后端,且所述驱动电机的后端输出轴与所述电子阻尼器连接。
24、作为优选方案,其中,其进一步包括一个用于记录直推杆位移状态的位移传感器,所述位移传感器的两端与前端定位座和后端固定座连接;或者,其进一步包括一个用于检测所述旋转底座旋转角度的角度电位器,所述角度电位器设置在所述转轴安装座和第一铰接轴之间。
25、本发明通过采用上述技术方案,通过将驱动单元和倾转单元的后部依次沿直线布置在定位管中,使得其整体安装更为便捷,通过采用丝杆和螺母作为驱动单元的传动构件,其具有传动精度高,不易磨损、使用寿命长的优点,从而可以有限解决了现有的旋翼飞行器倾转机构中传动机构磨损后导致其稳定性差、进而降低其使用寿命的问题;本发明所述丝杆与螺母连接的直推杆带动旋转关节摆动,通过将设置在最前端的旋转底座铰接于前端定位座的上端部,并通过旋转关节推动旋转底座旋转,可以是实现旋转底座在回收状态(旋翼处于垂直位置)和展开状态(旋翼处于水平位置)的两种状态之间转换。本发明通过将驱动单元、以及倾转单元中的丝杆、直线推杆均呈直线桩底布置于圆柱形的定位管中,其方便个零件的组装;同时,由于旋转底座的旋转是基于旋转底座本身与前端定位座的转轴一进行,旋转底座在旋转时不进行位置上的移动,即转轴一为其倾转角度提供了旋转基准,使得倾转角度控制更容易和方便。同时,倾转单元中的直推杆和旋转关节为推力构件,其结构相对于现有旋翼飞行器倾转机构的双四连杆机构构成的推力构件结构简单,大幅减少了零件数量,整体机构更为简单、便于安装、并减轻结构重量,从而减少飞行阻力,增加无人机续航时间以及抗风能力。
26、本发明进一步通过导向机构,使直推杆和螺母在所述丝杆驱动下做直线运动;通过将导向机构的导轨设置在前端定位座和后端固定座之间,特别是将设在直推杆的法兰的外缘上、在导轨内滑动的滑动件采用滚动轴承,从而降低了滑动件与导轨之间的摩擦阻力,提高了直推杆运动的顺畅性。
27、本发明进一步通过在驱动电机后端设置一个自锁单元,具体采用电子阻尼器,电子阻尼器是属于通电低阻尼,断电高阻尼,当旋转底座处于回收状态时,此时,通过驱动电机断电,使电子阻尼器处于高阻尼状态,从而可以实现自锁功能。由于,采用了电子阻尼器,可以在旋转底座处于回收状态时、即水平飞行时,使驱动电机断电,从而可以节省电能,增加前飞时间,增大航时。
28、本发明进一步在前端定位座和后端固定座之间设置了位移传感器,用于记录直线推杆位移状态,根据位移量以及旋转关节运动量可计算并确定当前旋转底座角度。或者,通过在转轴一处直接设置角度电位器,从而也可以直接检测旋转底座的倾转角度。
- 还没有人留言评论。精彩留言会获得点赞!