一种纵列双旋翼无人直升机的制作方法
本技术涉及无人机直升机的领域,尤其是涉及一种纵列双旋翼无人直升机。
背景技术:
1、直升机具有垂直起降和悬停能力,对起降场地的要求较低,能够在非铺装地面或城市高楼楼顶等场合起降,由于其使用的灵活性,直升机在航空器领域具有不可替代的作用。纵列双旋翼无人直升机具有前后布置的两个旋翼,其载荷能力较单旋翼带尾桨式直升机要好,在对飞行速度要求不高的领域具有较大优势;目前在航拍、农业、植保、快递运输、灾难救援、测绘、电力巡检、救灾等领域得到了广泛的应用,大大的拓展了无人机本身的用途。
2、现有的旋翼无人机下方都固定安装有起落架,用来支撑无人机本体,并且能够方便无人机的起飞和降落,但是现有的起落架大多采用两边两杆的方式,这种常见结构基本能够满足小型多旋翼无人机的起降性能要求,并且在无人机降落时起到了缓冲减震的作用,当无人机停放在地面时,起落架对无人机本体起到支撑作用。目前的无人机降落架,其缓冲减震效果不佳,当无人机本身负载有一定重量的物品时,在降落过程中难以有效减缓无人机降落产生的冲击力。
技术实现思路
1、为了提高无人机的减震性能,本技术提供一种纵列双旋翼无人直升机。
2、本技术提供的一种纵列双旋翼无人直升机,采用如下的技术方案:
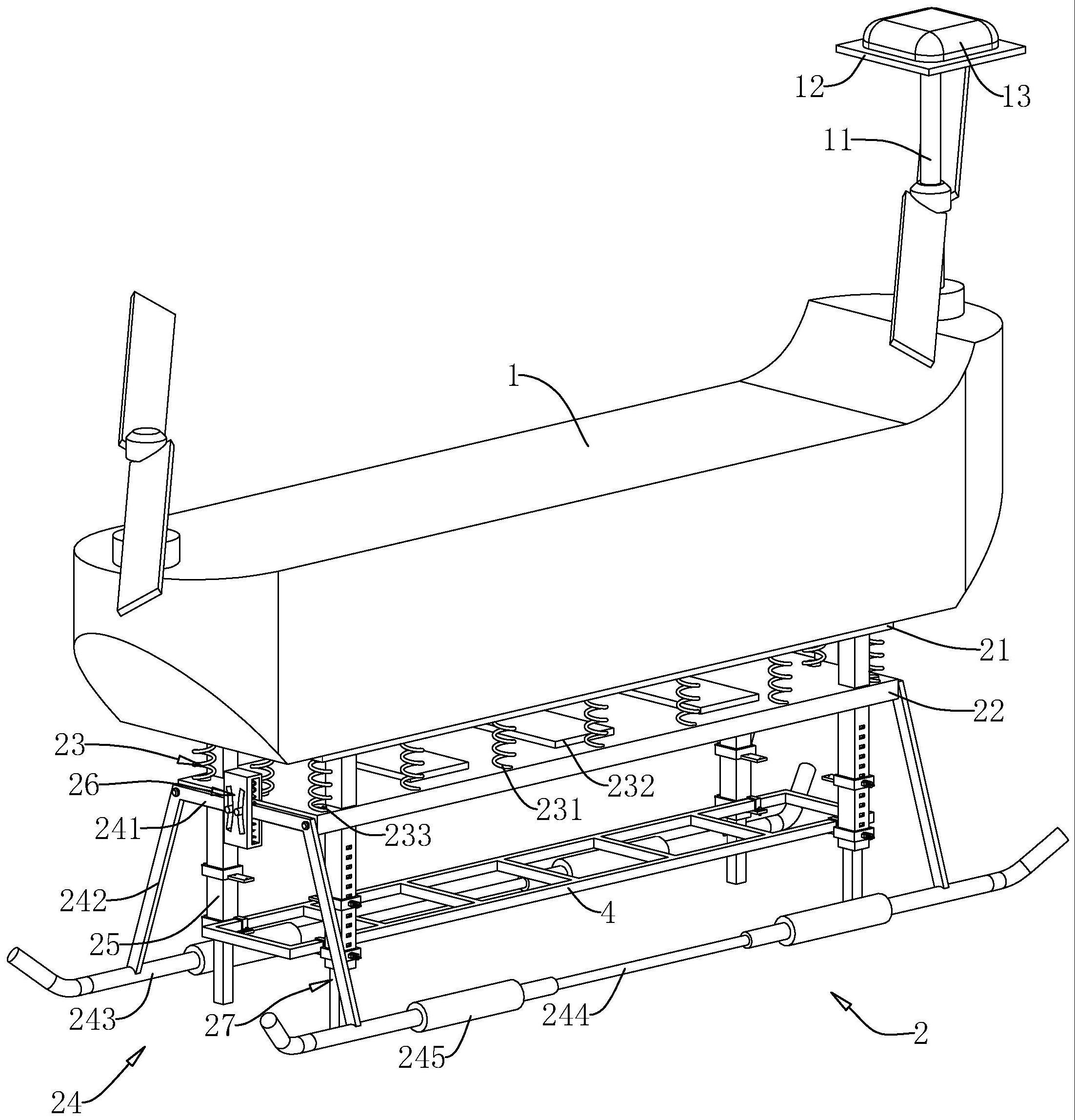
3、一种纵列双旋翼无人直升机,包括无人机本体以及安装在无人机本体下表面的减震装置,所述减震装置包括固定连接在无人机本体下表面的固定板、设置在固定板下方的减震板以及对称安装在减震板两端的多个支撑杆,所述固定板和减震板的长度方向均于无人机本体的长度方向相同,所述支撑杆一端与减震板连接,另外一端能够支撑在地面上,所述固定板和减震板之间设置有第一减震组件,所述第一减震组件包括安装在固定板和减震板之间的多个第一减震弹簧,所述第一减震弹簧一端与固定板连接,另外一端与减震板连接,并且多个第一减震弹簧沿固定板和减震板的边缘周向均匀分布。
4、当无人机本体在降落过程中,支撑杆下端能够先硬性支撑到地面上,然后第一减震弹簧被组件压缩,直到吸收完降落过程中,无人机本体产生的冲击力,避免无人机本体与支撑杆硬性连接的情况下,产生的振动对无人机本体内部的电器元件产生影响,并且设置的第一减震组件提高了无人机本体降落时的减震性能。
5、可选的,所述第一减震组件还包括设置在固定板和减震板之间的电磁铁组,所述电磁铁组包括两块电磁铁,所述固定板和减震板相对的表面上均安装有一块电磁铁,所述无人机本体内部设置有电源以及与电源连接的自动控制开关,所述自动控制开关与两块电磁铁电连接,两块所述电磁铁通电后能够产生相同的电极,使两块电磁铁之间相互排斥。
6、通过采用上述技术方案,当无人机本体降落产生的冲击力较大情况下,第一减震弹簧无法将降落时产生的冲击力全部吸收,会存在固定板与减震板撞击的情况发生,通过自动控制开关打开电源,让固定板和减震板上的电磁铁处于通电状态,在降落时,两块电磁铁之间能够产生相互排斥的力,从而使固定板和减震板之间能够相互排斥,提高了固定板和减震板之间的减震性能,并且可以吸收更多无人机本体降落时产生的冲击力。
7、可选的,所述固定板朝向减震板的表面上安装有接近传感器,所述接近传感器用于实时监测固定板和减震板之间的距离,所述无人机本体内部设置有plc控制器,所述plc控制器与接近传感器电连接,所述plc控制器还与自动控制开关连接。
8、通过采用上述技术方案,接近传感器能够在降落过程中,实时监测固定板和减震板之间的距离,当固定板和减震板之间的距离小于设定的最小距离时,接近传感器传递信号给plc控制器,并通过plc控制器控制自动控制开关的打开,使电源与电磁铁接通,从而让两块电磁铁瞬间通电,并产生相互排斥的力;另外,通过设置的plc控制器,能够将固定板和减震板之间的减震实现自动控制,避免需要人工进行干预,当无人机本体在降落且固定板和减震板之间的距离在不断减小时,plc控制器才控制电源与电磁铁接通,让电磁铁瞬间通电,并产生相互排斥的力,节约了用电量。
9、可选的,所述固定板和减震板之间竖直设置有导向杆,所述导向杆上端与固定板下表面固定,所述导向杆远离固定板的一端向下延伸设置并穿过减震板,所述减震板能够沿着导向杆的方向滑动设置。
10、通过采用上述技术方案,无人机本体在降落过程中,固定板和减震板之间进行减震和吸收冲击力的第一减震弹簧和电磁铁组均为柔性连接,当降落过程中,无人机本体的重心不稳时,无人机本体会将第一减震弹簧压弯,无法起到减震作用,通过设置的导向杆,使无人机本体可以沿着导向杆的方向向下移动,从而让第一减震弹簧可以沿着其轴线的方向被压缩,让第一减震弹簧充分发挥减震吸能的作用。
11、可选的,所述支撑杆由水平杆和倾斜杆组成,并且支撑杆与减震板之间转动连接,所述支撑杆和减震板之间设置有第二减震组件,所述第二减震组件包括固定在减震板端部的限位盒,所述水平杆远离倾斜杆的端部伸入到限位盒内部,在限位盒的表面上开设有呈弧形的导向孔,在水平杆远离倾斜杆的端部固定有导向块,所述导向块滑动设置在导向孔内部,在限位盒内部且位于水平杆上下两侧的位置处设置有一对第二减震弹簧,所述第二减震弹簧一端与限位盒固定,另外一端与水平杆固定。
12、通过采用上述技术方案,在无人机本体降落过程中,独立转动设置在减震板端面上的支撑杆可以适应在凹凸不平的地面上,使无人机本体可以稳定的支撑在地面上,在复杂地形进行降落的过程中,限位盒能够避免水平杆摆动的范围过大,防止出现减震板与地面接触的问题,水平杆在限位盒内部摆动时,能够压缩第二减震弹簧,从而可以进行减震吸能。
13、可选的,所述倾斜杆远离水平杆的一端向下且向外延伸设置,在减震板同一端的两倾斜杆呈八字型,所述倾斜杆远离水平杆的端部固定有支撑腿,所述支撑腿与减震板的长度方向设置,在减震板同侧的两支撑腿之间连接有弹性连接条。
14、通过采用上述技术方案,无人机本体在降落过程中,支撑腿先接触到地面上,并且设置的支撑腿相对于倾斜杆增加了与地面的接触面积,从而使无人机本体在降落过程中更加稳定,设置的弹性连接条能够使无人机本体降落在凹凸不平地面的情况下,同侧的两根支撑腿之间会发生不同角度的摆动,来适应不同的地形,并且可以防止同侧的两支撑杆之间出现较大的角度差,让无人机本体朝一侧倾斜,因此,通过设置的弹性连接条,让两支撑杆之间的摆动角度差可以控制在安全范围内,防止无人机本体倾倒。
15、可选的,所述导向杆上设置有第三减震组件,所述导向杆为内部中空且下端开口的结构,所述第三减震组件包括滑动设置在导向杆内部的减震杆,所述减震杆的下端能够从导向杆下端伸出,所述导向杆内部设置有第三减震弹簧,所述第三减震弹簧一端与导向杆固定,另外一端与减震杆固定。
16、通过采用上述技术方案,设置的第三减震组件能够起到最后防护的作用,当无人机本体超重降落过程中,减震杆能够先支撑到地面上,通过压缩第三减震弹簧,吸收降落时产生的冲击力,当第三压缩弹簧被全部压缩完成后,导向杆可以起到硬性支撑的作用,使无人机本体可以稳定支撑到地面上。
17、可选的,所述导向杆在固定板和减震板之间设置有多个,所述导向杆外部滑动配合有滑套,所述滑套上设置有对滑套进行固定的固定件,所述滑套上还固定有安装板,相邻多个安装板上设置有能够固定用于承载物品的安装架,所述安装板上设置有对安装架固定的卡扣。
18、通过采用上述技术方案,在导向杆上设置的滑套以及通过卡扣固定在滑套上的安装架,可以在减震板下方设置安装设备或者运送伤员的安装平台,从而实现该无人机本体能够在多种领域发挥作用,在导向杆上设置的滑套,可以在导向杆上进行调节,避免安装的设备在降落过程中,与地面发生碰撞。
19、可选的,所述固定件包括滑动穿设在滑套上的插块,所述导向杆的外壁上开设有多个与插块端部配合的插槽,所述滑套上且位于插块的位置处固定有u型架,所述插块滑动设置在u型架和滑套之间,所述插块远离滑套的端部固定有拉杆,所述拉杆朝远离插块的方向延伸设置,并且拉杆滑动穿过u型架,所述拉杆上套设有复位弹簧,所述复位弹簧一端与插块固定,另外一端与u型架固定。
20、通过采用上述技术方案,在导向杆上调节滑套的位置时,工作人员可以通过拉杆将插块的端部从插槽内拉出,然后快速的在导向杆上滑动滑套,达到调节的目的。
21、可选的,所述支撑腿上转动套设有与地面接触的滚动环,所述滚动环由橡胶材质制成。
22、通过采用上述技术方案,当无人机本体降落,使支撑腿与地面接触的过程中,滚动环能够与地面转动接触,避免支撑腿与地面之间发生硬性摩擦。
23、综上所述,本技术包括以下至少一种有益技术效果:
24、1.本技术通过设置的第一减震组件、第二减震组件和第三减震组件,使无人机本体在降落的过程中,能够实现三级减震,并且逐级吸收降落时产生的冲击力,第一减震组件、第二减震组件和第三减震组件三者结合之后,能够有效提高无人机本体的减震性能,并且让无人机本体可以稳定的支撑在地面上;
25、2.本技术通过设置的接近传感器和plc控制器,能够实时监测固定板和减震板之间的距离,当固定板和减震板之间的距离小于设定的最小距离时,plc控制器能够接受接近传感器传递的电信号,然后plc控制器产生动作,并控制自动开关打开,让电磁铁瞬间通电,使两块电磁铁产生相互排斥的力,用于吸收无人机本体降落时产生的冲击力。
- 还没有人留言评论。精彩留言会获得点赞!