基于红外热成像对比识别故障点的光伏巡检无人机的制作方法
本发明涉及无人机,具体为基于红外热成像对比识别故障点的光伏巡检无人机。
背景技术:
1、光伏发电作为重要的新能源发电形式,在新能源发电中占有很大的比重,与集中式光伏相比,分布式光伏电源处于用户侧,发电供给当地负荷,可以有效减少对电网供电的依赖,减少线路损耗,在光伏电站巡检的过程中,往往需要进行无人机巡检线,由于无人机能够在空中实现自主飞行并执行一定任务。无人机与普通飞机相比,其结构简单成本低,便于制造和维护;由于无人驾驶,所以其有效载荷更大,能够安装更多的设备或武器,完成任务的效率和可靠性更高。
2、现有的无人机在对光伏电站进行巡检时,观察的角度较为单一,不能进行全方位的调节,无法对不同设备进行巡检设置,并且,多是根据无人机上的摄像图片进行人眼识别,需要进行大量的人工核对比较,劳动强度大,检测正确率低下,导致巡检效果不理想。
技术实现思路
1、本发明的目的在于提供基于红外热成像对比识别故障点的光伏巡检无人机,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:基于红外热成像对比识别故障点的光伏巡检无人机,该基于红外热成像对比识别故障点的光伏巡检无人机包括机体、视觉检测相机、缓冲组件、连接组件和翻转组件;
3、所述机体上安装有视觉检测相机,所述机体的底部固定安装有缓冲组件和调整组件,通过缓冲组件可以吸收无人机硬着陆时的纵向冲击力,所述缓冲组件间固定连接有连接组件,通过连接组件可以吸收无人机硬着陆时的横向冲击力,且有利于减缓无人机纵向上的冲击力,所述机体上两侧对称固定安装有翻转组件,通过翻转组件控制无人机的螺旋桨进行翻转,方便控制无人机完成高强度操作;
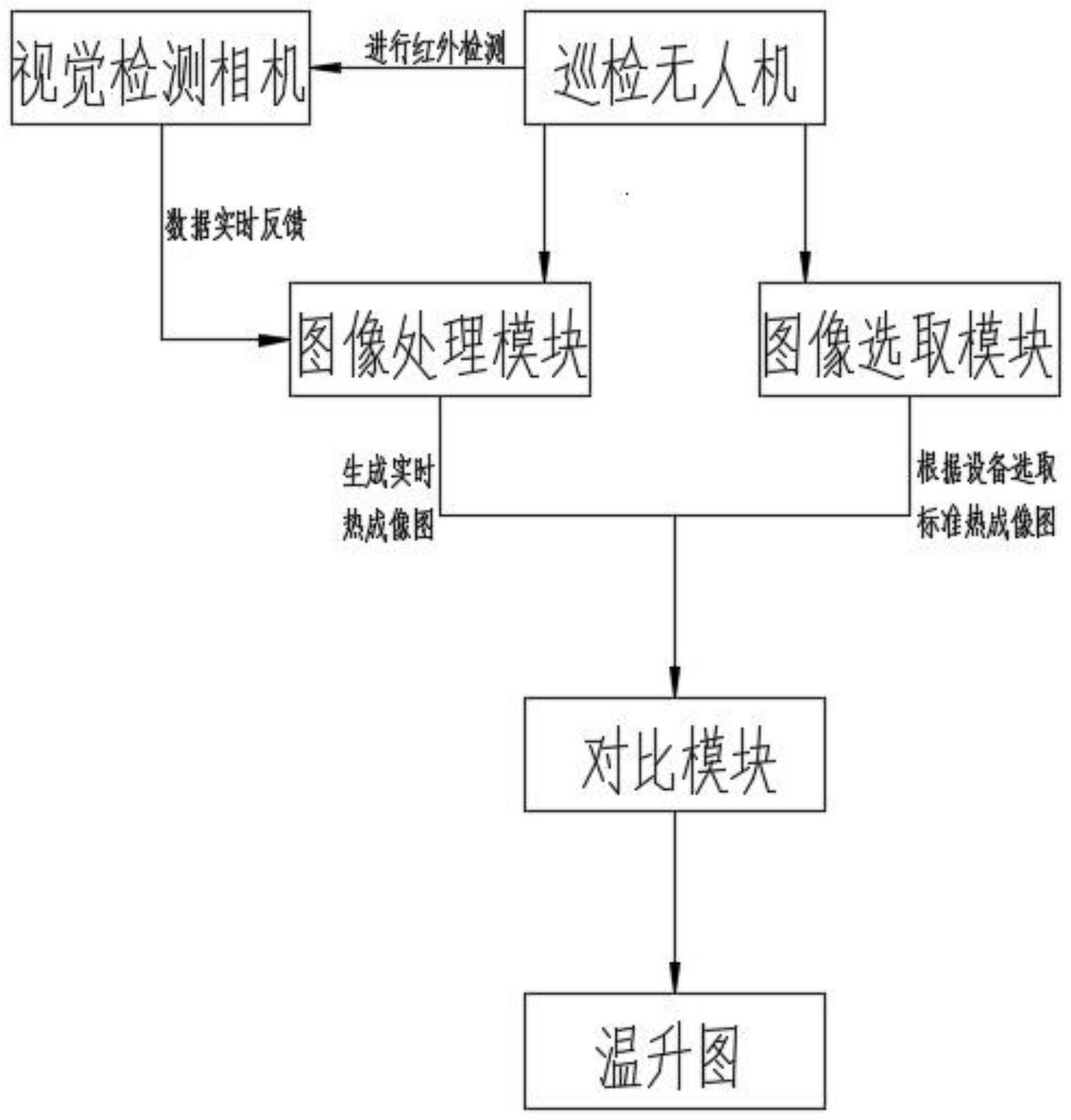
4、所述机体上设置有图像处理模块、图像选取模块和对比模块;
5、所述图像处理模块用于根据视觉检测相机的检测生成实时热成像图;
6、所述图像选取模块用于根据设备选取标准热成像图;
7、所述对比模块用于将实时热成像图各点位数值和标准热成像图各点位数值的差值进行计算,以温度变化幅度作为数据实时输出温升图;
8、通过视觉检测相机识别设备类型,并对无人机巡检坐标进行精确控制,确保每次检测位置统一,再获得实时热成像图,将实时热成像图各点位数值和标准热成像图各点位数值的差值进行计算,以温度变化幅度作为数据实时输出温升图,在温升图中提高对比度,由于电流波动而导致的温升会在电路各处体现,各个位置变化幅度类似,无温升图中无明显颜色突出,而故障点处的温升会由于对比度的提升更加明显,提高了巡检精度。
9、作为优选技术方案,所述缓冲组件包括固定杆、限位板、抵块、通孔一、第一弹簧、连杆、转板、受力板;
10、所述机体的底部固定安装有固定杆,所述固定杆的下端固定安装有限位板,通过固定杆底部设置的限位板可以避免抵块从固定杆上脱离,所述固定杆上滑动安装有抵块,所述抵块上开设有通孔一,所述固定杆贯穿通孔一,方便实现抵块在固定杆上进行纵向滑动,所述固定杆上固定连接有第一弹簧,所述第一弹簧处于抵块的上方,由于固定杆与通孔一为滑动配合,抵块在上移过程中对第一弹簧进行挤压,通过压缩第一弹簧达到吸收纵向冲击力的目的,所述同侧的抵块间固定连接有连杆,通过连杆可以保障同侧的抵块同步移动,所述连杆上转动安装有转板,所述转板的底部固定安装有受力板,所述受力板为半圆柱板,通过受力板可以有效的将硬着陆的冲击力进行分解与传导,当受力板在受到冲击时转板可以发生偏转,进而能有效的将冲击力进行传导并吸收。
11、作为优选技术方案,所述连接组件包括连接杆、开孔、横杆、滑杆、滑孔、第二弹簧、固定块、固定销、推拉杆、连接孔;
12、所述两侧的抵块间固定安装有连接杆,所述连接杆上开设有开孔,所述开孔为方形孔,位于中间位置,所述开孔内固定安装有横杆,所述横杆上滑动安装有滑杆,所述滑杆上开设有滑孔,所述滑孔内贯穿有横杆,由于横杆与滑杆上滑孔为滑动配合,使得滑杆可以在横杆上进行横向移动,所述滑杆上固定连接有第二弹簧,所述第二弹簧处于滑杆和开孔孔壁之间,滑杆在横向移动过程中能够压缩第二弹簧,在第二弹簧形变过程中可以吸收横向冲击力,避免无人机侧翻,所述转板和滑杆上均固定安装有固定块,所述固定块间固定安装有固定销,所述固定销上转动连接有推拉杆,所述推拉杆的两端均开设有连接孔,所述固定销贯穿连接孔,由于固定销与连接孔为转动配合,使得推拉杆可以在固定销上转动,能够避免固定销与推拉杆互锁,当转板发生偏转时通过推拉杆可以带动滑杆在横杆上横向移动。
13、作为优选技术方案,所述翻转组件包括转块、驱动电机、转轴、套筒、通孔二、限制杆、翻转臂、螺旋桨、主齿轮、内齿轮、啮合孔;
14、所述机体的上端两侧对称安装有转块,所述转块的一侧固定安装有驱动电机,通过驱动电机能够提供给螺旋桨翻转提供动力源,所述驱动电机的输出端上固定安装有转轴,所述转轴用于实现动力传输,所述转轴上套设有套筒,通过套筒用于实现与翻转臂连接,所述套筒上开设有通孔二,所述通孔二内贯穿有转轴,所述套筒和驱动电机间固定安装有限制杆,通过限制杆可以对套筒进行固定,所述套筒的左端转动连接有翻转臂,所述翻转臂上固定安装有螺旋桨,通过翻转臂可以实现带动螺旋桨前后摆动,所述翻转臂一端开设有啮合孔,所述啮合孔内穿插有套筒,所述转轴的端部固定安装有主齿轮,所述啮合孔内固定安装有内齿轮,所述主齿轮与内齿轮相啮合,通过主齿轮的旋转可以带动内齿轮转动,进而让翻转臂进行翻转,且主齿轮与内齿轮的相互啮合能够避免翻转臂自行转动。
15、作为优选技术方案,所述翻转组件下设置有抬升组件,所述抬升组件用于实现控制翻转臂上的螺旋桨左右摆动。
16、作为优选技术方案,所述抬升组件包括轨道、滑动块、伺服电机、连接块、力臂;
17、所述机体的两侧固定安装有轨道,所述轨道上滑动安装有滑动块,由于滑动块与轨道为滑动配合,使得滑动块可以在轨道上进行移动,所述滑动块上固定安装有伺服电机,通过伺服电机可以给滑动块提供驱动力,所述套筒的底部固定安装有连接块,通过连接块方便将力臂与套筒相连接,所述伺服电机上转动安装有力臂,方便滑动块在移动过程中不会与力臂互锁,所述力臂与连接块转动连接,通过伺服电机驱动滑动块在轨道移动,滑动块在移动过程中可以推动力臂抬升套筒,进而带动螺旋桨进行左右方向的移动。
18、作为优选技术方案,所述转板的上部开设有穿孔,所述穿孔内固定安装有轴承一,所述轴承一内固定连接有连杆,通过轴承一的润滑作用,可以保障转板围绕连杆进行偏转时更舒畅。
19、作为优选技术方案,所述套筒上开设有固定槽,所述固定槽内固定安装有轴承二,所述轴承二的外部固定安装有固定环,通过轴承二可以使固定环在固定槽内进行转动,所述固定环一侧与翻转臂固定连接,通过固定环可以将翻转臂固定连接在套筒上,避免翻转臂从套筒上掉落。
20、作为优选技术方案,所述转块上开设有转孔,所述机体的顶部固定安装有u型杆,所述u型杆贯穿转孔,由于转孔与u型杆为转动配合,可以使得转块围绕u型杆进行翻转,有利于翻转臂的抬升操作。
21、作为优选技术方案,所述调整组件包括气泵、调节旋钮、滑道、移动块、联动块、齿板、伸缩杆、喷气器、气管;
22、所述机体的底部安装有气泵,所述气泵上设置有两组调节旋钮,且气泵上设有滑道,所述滑道内滑动安装有两组移动块,两组所述移动块的底部安装有联动块,所述联动块与滑杆通过伸缩杆相连接,两组所述联动块的相背面上安装有齿板,所述齿板与调节旋钮相啮合,所述机体的两侧对称安装有两组喷气器,两组所述喷气器与气泵通过气管相连接,当滑杆在推拉杆的带动下进行移动时,由于联动块通过移动块可以沿着滑道进行横向移动,此时,滑杆可以通过伸缩杆带动移动块进行横移,从而让移动块上的齿板带动气泵上的调节旋钮进行旋转,进而可以启动气泵,让气泵通过气管为喷气器供气,利用喷气器喷射气流的作用力可以与下落冲击力形成反作用力,从而可以保障无人机的稳定降落,并且,通过滑杆带动联动块的移动距离变化可以相应的控制调节旋钮的旋转角度,达到对气泵供气量的控制。
23、与现有技术相比,本发明所达到的有益效果是:
24、本技术通过无人机上的视觉检测相机能够识别设备类型,并对无人机巡检坐标进行精确控制,确保每次检测位置统一,再获得实时热成像图,将实时热成像图各点位数值和标准热成像图各点位数值的差值进行计算,以温度变化幅度作为数据实时输出温升图,在温升图中提高对比度,由于电流波动而导致的温升会在电路各处体现,各个位置变化幅度类似,无温升图中无明显颜色突出,而故障点处的温升会由于对比度的提升更加明显,提高了巡检精度。
25、设置有缓冲组件和连接组件,当无人机进行硬着陆,受力板在受到冲击时能有效的将冲击力进行传导,使转板可以发生偏转,由于转板可以围绕连杆翻转,使得连杆受到向上的作用力,进而带动抵块在固定杆上进行纵向移动,抵块在上移过程中对第一弹簧进行挤压,通过压缩第一弹簧吸收纵向冲击力,与此同时,转板发生偏转时可以拉动推拉杆移动,使得推拉杠可以带动横杆上的滑杆进行横向移动,滑杆在横向移动过程中能够压缩第二弹簧,在第二弹簧形变过程中可以吸收横向冲击力,避免无人机侧翻,从而可以在无人机硬着陆时起到减震保护的效果,能够避免视觉检测相机受到震动损坏。
26、设置有翻转组件和抬升组件,当无人机需要完成复杂操作时,控制驱动电机运行,使得转轴可以带动主齿轮进行转动,由于主齿轮与内齿轮相啮合,从而可以带动翻转臂进行转动,进而让螺旋桨能够在前后方向上进行转动,再通过运行伺服电机,驱动滑动块在轨道上移动,从而可以让力臂将套筒在水平方向上进行抬升,方便改变螺旋桨在水平方形上的位置,能控制螺旋桨进行多自由度的调整,有利于无人机完成进行复杂操作,方便无人机带动视觉检测相机对设备进行特定角度的巡检。
27、通过调整组件可以根据缓冲组件的运行,使滑杆通过伸缩杆带动移动块进行横移,让移动块上的齿板带动气泵上的调节旋钮进行旋转,从而可以启动气泵,让气泵通过气管为喷气器供气,利用喷气器喷射气流的作用力可以与下落冲击力形成反作用力,从而可以保障无人机的稳定降落,并且调整组件可以根据冲击力强度相应的自动控制调节旋钮的旋转角度。
- 还没有人留言评论。精彩留言会获得点赞!