一种用于对卫星编队的轨道进行控制的方法与流程
本发明一般涉及卫星轨道控制领域。更具体地,本发明涉及一种用于对卫星编队的轨道进行控制的方法。
背景技术:
1、编队飞行是一种卫星组网方式,指若干颗卫星运行在相互接近的轨道上并构成一个特定形状,各颗卫星在保持这个形状的同时,以相同的轨道周期绕地球飞行。卫星编队飞行相较于单颗卫星可以完成更多维度的载荷任务。
2、卫星编队的控制包括管道控制和编队控制两方面。其中,管道控制用于修正由于摄动力造成的绝对轨道偏差,目的是保持主星在目标管道内。编队控制用于消除主辅星面质比差异造成的编队构型异化,目的是保持星间相对位置以维持编队构型。
3、目前的卫星编队的控制主要有两种方案,第一种方案是先后控制主、辅星,即,针对主星计算控制量后,先进行主星的机动,在主星到达目标位置后,再针对辅星计算控制量,再进行辅星的机动。第二种方案是,先针对主星计算控制量,然后将该控制量和控制时间同步至辅星,针对主星和辅星采取相同的控制量和控制时间。
4、但是,通常的卫星编队中,主辅星距离尺度非常小。无论是采用先后控制主、辅星的方案还是采用针对主、辅星采取相同控制量的方案,在控制过程中均会破坏原有的编队构型,可能会导致编队卫星发生碰撞的危险。当采用先后控制主、辅星的方案时,流程复杂耗时长,需要消耗多轨次进行控制。当采用针对主、辅星采取相同控制量的方案时,如果初始状态卫星编队构型已经变化,则需要在控制之后再次进行编队控制进行调整,也存在流程复杂耗时长,需要消耗多轨次进行控制的问题。
5、此外,通过面外脉冲控制升交点赤经往往需要较大的推力,消耗较多的推进剂,如果卫星编队中存在仅配备了小推力电推的卫星,则上述两种控制方案均不适用。
6、基于此,如何同时进行卫星编队的管道控制和编队控制,并减少控制次数及控制时间、降低发生碰撞的风险,是近地轨道卫星编队控制亟待解决的问题。
技术实现思路
1、为了至少解决如上所提到的一个或多个技术问题,本发明提供了一种卫星编队轨道控制方法,以目标星为控制基准,获取主星的控制量和辅星的控制量;获取主星与辅星的编队设计参数,修正辅星的控制量;同步控制主星和辅星;其中,卫星编队包括主星和辅星,目标星为主星的在轨道中的理想位置。
2、根据本发明的一个实施方式,对主星的控制包括:获取主星在当前轨道圈数第一时刻的相对偏心率;确定下一轨道圈数第二时刻的纬度辐角;第一时刻作为计算时刻,进行数据获取和计算操作;第二时刻作为控制时刻,进行控制操作。
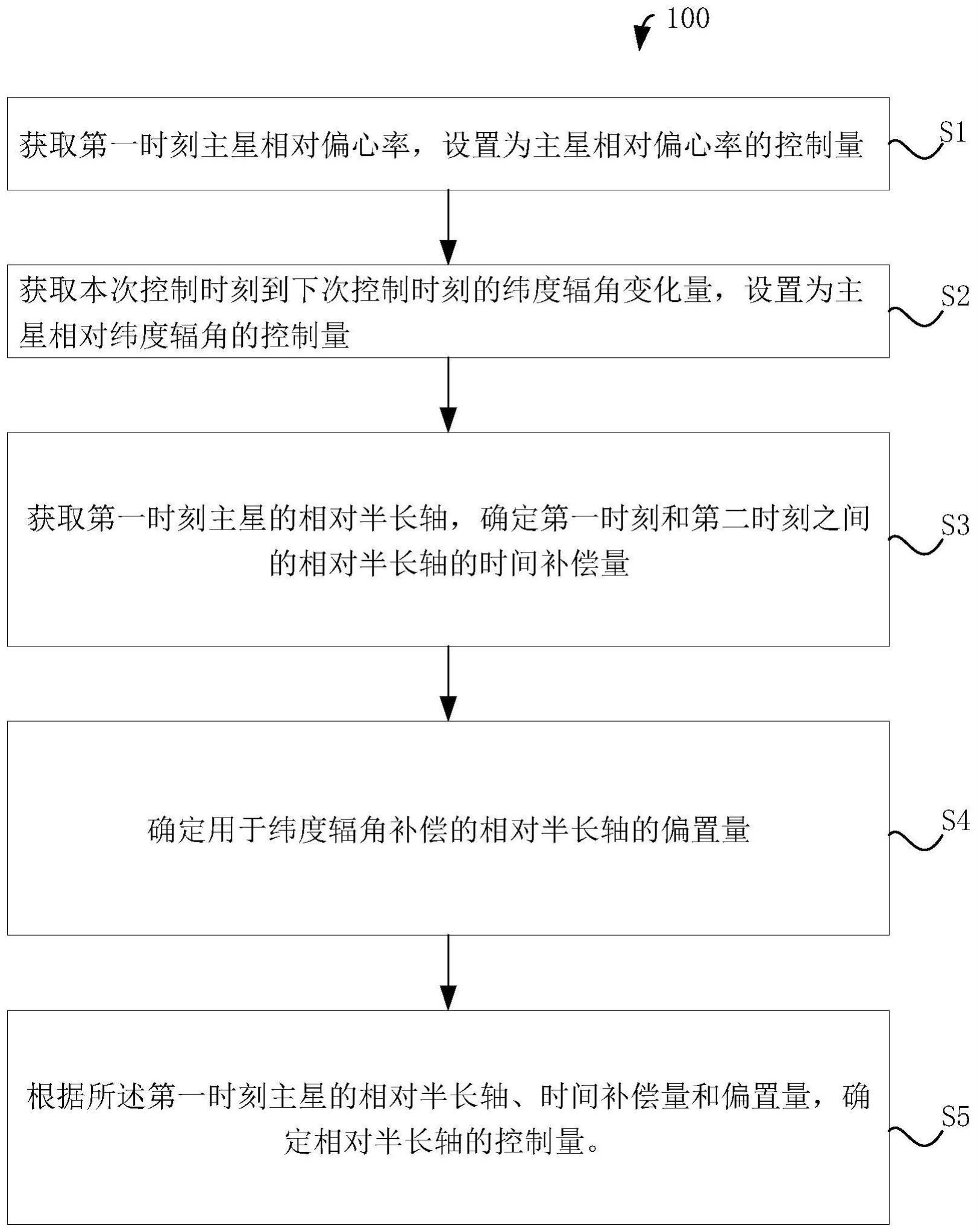
3、根据本发明的一个实施方式,所述主星的调节量包括:获取第一时刻主星相对偏心率,设置为主星相对偏心率的控制量;获取本次控制时刻到下次控制时刻的纬度辐角变化量,设置为主星相对纬度辐角的控制量;获取第一时刻主星的相对半长轴;确定第一时刻和第二时刻之间的相对半长轴的时间补偿量;确定用于纬度辐角补偿的相对半长轴的偏置量;根据所述第一时刻主星的相对半长轴、时间补偿量和偏置量,确定相对半长轴的控制量。
4、根据本发明的一个实施方式,对所述主星采用二脉冲控制,包括第一主脉冲和第二主脉冲;所述第二时刻为第一主脉冲中心时刻;第一主脉冲中心时刻的纬度辐角通过以下公式获得:ucm=mod(atan2(δδeym,δδexm),π),其中,δδeym,δδexm分别为偏心率矢量的调节分量;所述第二主脉冲和第一主脉冲的纬度辐角间隔π。
5、根据本发明的一个实施方式,通过下式确定第一主脉冲和第二主脉冲:
6、第一主脉冲的大小为:
7、第二主脉冲的大小为:
8、其中,下标m均表示主星的参数。vm表示卫星惯性系下速度。表示卫星第一次脉冲迹向(或速度向、切向、t向)速度改变量。δδam表示卫星两次脉冲总半长轴改变量。am表示卫星半长轴。δδem表示卫星两次脉冲总偏心率矢量(e矢量)改变量。
9、根据本发明的一个实施方式,对辅星的控制包括:对所述辅星采用三脉冲控制,包括第一辅脉冲、第二辅脉冲和第三辅脉冲;所述第一辅脉冲的中心时刻即为所述辅星的控制时刻;第二辅脉冲的中心时刻的纬度辐角为ucc+π;第三辅脉冲的中心时刻的纬度辐角为ucc+2π。
10、根据本发明的一个实施方式,对辅星的控制包括:获取本次控制的第三辅脉冲至下一次控制的第一辅脉冲中心时刻的偏心率偏移量;根据所述偏移量设置偏心率矢量控制量的偏置量;将所述偏置量与辅星的偏心率矢量叠加,确定偏心率矢量控制量。
11、根据本发明的一个实施方式,根据所述偏心率矢量控制量确定辅星各控制时刻的纬度辐角;确定位于所述辅星的控制时刻时的主星相对目标星的相对根数;将所述主星相对目标星的相对根数叠加编队设计参数,得到辅星的目标控制量。
12、根据本发明的一个实施方式,对辅星的控制包括:通过以下公式确定辅星偏心率矢量控制量:
13、
14、
15、
16、
17、
18、通过辅星偏心率控制量确定辅星的控制时刻的纬度辐角:
19、ucc=mod(atan2(δδeyc,δδexc),π);
20、其中,
21、表示主辅星相对偏心率矢量(e矢量)的辐角,数值上等于atan2(δδeyc,δδexc),是由于摄动带来的自由变化率;
22、mctc中,m为控制周期(单位:轨次),t为卫星轨道周期,mt为卫星两次控制间隔时间,m无单位,t单位s;表示辅星相对偏心率矢量(e矢量)在本次三脉冲结束时的控制目标;表示辅星相对ex在本次三脉冲结束时的控制目标,单位rad;表示辅星相对ey在本次三脉冲结束时的控制目标,单位rad。
23、根据本发明的一个实施方式,通过以下公式确定三脉冲控制中第一辅脉冲、第二辅脉冲和第三辅脉冲的大小:
24、
25、其中,
26、下标c均表示辅星;vc表示卫星惯性系下速度,单位m/s;δδac表示卫星三次脉冲内总半长轴改变量,单位m;δδec表示卫星三次脉冲内总偏心率矢量(e矢量)改变量,单位rad;ac表示卫星半长轴,单位m;δδuc表示卫星三次脉冲内总纬度辐角改变量,单位rad;3tc表示三倍轨道周期,单位s。
27、根据本发明的一个实施方式,根据以下公式确定脉冲点火起止时间:
28、
29、
30、其中,tnow为当前计算时刻,为受控星当前纬度辐角;和为步骤二至步骤四中计算得到的最优实施时刻和脉冲大小;ms和fs分别为受控星质量和推进器推力大小;k=1,2,3分别代表每颗星的第k次脉冲;s=m,c分别代表主星与辅星。
31、在本发明中,采用以目标星为基准,同时控制主、辅星,并用辅星的参数修正辅星的控制量,可以减少主、辅星在轨道控制过程中的容易碰撞的问题。在进行主辅星控制时,采用当前轨道圈数计算、下一轨道圈数控制的方式,将计算和控制进行分离,便于减少控制误差。在确定控制量时,采用计算时刻与控制时刻的时间差进行时间补偿、采用对纬度辐角进行补偿从而偏置相对半长轴的控制量的方式,使得控制量更加精确。采用辅星的本次调节到下次调节间隙摄动造成的偏心率偏移量对偏心率矢量控制量进行偏置,采用无控条件下辅星三脉冲结束时刻的相对于目标星的相对根数调节相对半长轴的控制量和相对纬度辐角的控制量,使得对辅星的控制更精确,避免相撞。
- 还没有人留言评论。精彩留言会获得点赞!