一种两栖子母球形机器人及其作业方法
本发明涉及球形机器人,具体涉及一种两栖子母球形机器人及其作业方法。
背景技术:
1、随着信息技术的飞跃式发展及其在军事领域的广泛应用,信息情报与作战行动联系日益密切,加之在“发现即摧毁”、“察打一体化”等现代作战理念加持下,情报搜集已成为决定战争成功与否的最关键环节。现有的侦察系统仍然存在许多情报空白区域,例如,现有的光学侦察卫星无法侦测云层较厚、气象条件复杂以及植被或覆盖物密集区域;现有的红外侦察卫星只能侦测强热源物体等等。球形机器人凭借其高效的机动能力、出色的伪装能力能够很好地填补现存主流侦察设备的侦察空白地带、有效地提高海陆空三位一体信息化平台的作战能力。
2、公开号为cn115284803a的专利公开了一种具备对外操作功能的旋翼角度可调的两栖球形机器人,其包括壳体、机架、旋翼组件和机械臂,具有能够在运动的同时对外进行操作的优点。虽然该具备对外操作功能的旋翼角度可调的两栖球形机器人可以实现较为复杂地形的越障,必要时可以变形为无人机进行飞行越障,同时也能实现无人机的某些功能,但在其飞行时由旋翼产生的气流会自上而下的流经其球体外壳,最终无可避免地形成紊乱气流干扰其飞行,降低了该两栖球形机器人在飞行时的可操作性和稳定性。
3、公开号为cn113997738a的专利公开了一种球形两栖机器人平台,其包括壳体、动量轮、动量轮驱动件、可变惯量调节组件和旋翼升力组件,结合了轮式与旋翼的结构,既能应对高速的陆地行驶,还能应对垂直方向的运动。虽然该球形两栖机器人平台通过巧妙的机械布局调整了旋翼的摆放位置,优化了其气动模型,最大限度地避免了在飞行时紊乱气流的产生,有效地改善了飞行时的可操纵性,但其高度集成的一体化设计的机身无形之中也增加了球形两栖机器人的重量,不仅在一定程度上增加了其成本和维修难度,而且也大大削弱了球形两栖机器人的续航能力,不适合应用于需要进行长时间的伪装潜伏和情报搜集的工作。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种两栖子母球形机器人及其作业方法,其通过一舰多机提升整体的侦察能力和作业范围,整体结构体积小且质量轻,能够快速稳定地移动,具备机动性高、隐蔽性强、续航持久等优点。
2、本发明的目的通过以下技术方案来实现:
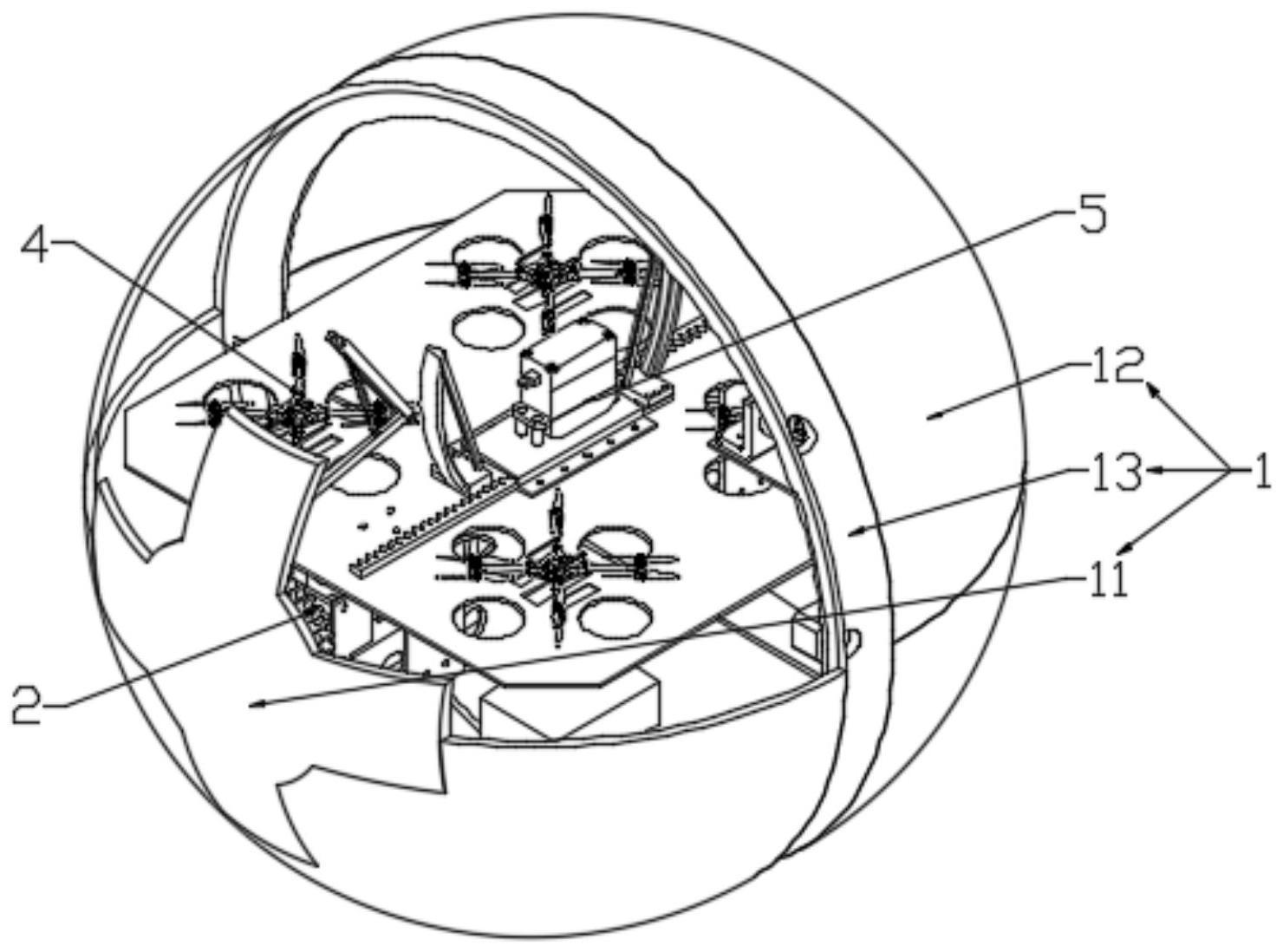
3、一种两栖子母球形机器人,包括:外壳,外壳可打开或关闭;行走控制装置,行走控制装置设于外壳内并与外壳固定连接,行走控制装置用于驱动外壳转动;重心控制装置,重心控制装置设于行走控制装置上,重心控制装置用于配合行走控制装置驱动外壳转向;侦察装置,侦察装置包括母机侦察装置和子机侦察装置,母机侦察装置设于外壳上,子机侦察装置设于外壳内;变形装置,变形装置设于子机侦察装置上并与外壳转动连接,变形装置用于驱动外壳开闭;控制系统用于控制行走控制装置、重心控制装置、侦察装置和变形装置协同作业。
4、进一步地,外壳包括凸十字壳体、凹十字壳体和中央环状壳体,凹十字壳体设有两个且呈半球状,两个凹十字壳体通过中央环状壳体对接,两个凹十字壳体相对的凹陷部开设有十字凹槽,凸十字壳体通过十字凹槽与凹十字壳体卡合,凸十字壳体、凹十字壳体和中央环状壳体围成球状的外壳,凹十字壳体由两个结构相互对称的上壳体和下壳体对接而成,行走控制装置与中央环状壳体内壁固定连接,变形装置与上壳体转动连接。
5、进一步地,行走控制装置包括第一支撑框和行走驱动机构,第一支撑框设于外壳内并通过加强筋与中央环状壳体内壁固定连接,行走驱动机构设于第一支撑框对称的两侧并与凸十字壳体固定连接,行走驱动机构包括第二支撑框、直流电动机、辐轮、第一连接片、减速齿轮、传动轴和输出齿轮,第二支撑框设于第一支撑框的侧壁上,直流电动机设于第一支撑框底部,辐轮固定于凸十字壳体内壁,第一连接片设于第二支撑框上,减速齿轮设于第一支撑框外侧,直流电动机的输出轴穿过第一连接片并接于减速齿轮,传动轴转动设于第一支撑框上并与第一连接片转动连接,传动轴向第一支撑框外侧延伸并接于辐轮,输出齿轮设于传动轴上并与减速齿轮啮合,辐轮的形心、输出齿轮的形心和壳体的形心共线。
6、进一步地,重心控制装置包括第二连接片、第一单轴舵机、配重块、第三连接片和l型连接片,第二连接片固定于第一支撑框的侧边中部并位于两个驱动装置之间,第一单轴舵机设于第二连接片上,第三连接片通过舵机法兰与第一单轴舵机上的舵机齿轮啮合,l型连接片设于第三连接片上,配重块设于l型连接片上。
7、进一步地,母机侦察装置包括红外传感器和视觉摄像头,红外传感器和视觉摄像头均设于中央环状壳体上。
8、进一步地,第一支撑框上设有第三支撑框,第三支撑框顶部设有无人机甲板,子机侦察装置设有多个,每个子机侦察装置均包括微型无人机、无人机充电桩和无线电引导装置,微型无人机通过电磁卡扣设于无人机甲板上,无人机充电桩和无线电引导装置均设于无人机甲板上。
9、进一步地,变形装置包括连杆组件和变形驱动机构,变形驱动机构设于无人机甲板上,连杆组件设有两组且两组连杆组件与两个凸十字壳体一一对应,连杆组件包括第一连杆、第二连杆、第三连杆、拉簧和压簧,第一连杆固定于凸十字壳体内壁,第二连杆一端与第一连杆转动连接,第一连杆中部和第二连杆中部通过压簧连接,压簧处于压缩状态,第三连杆一端与第二连杆远离第一连杆的一端转动连接,第三连杆另一端与对应的上壳体的内壁转动连接,拉簧两端分别与第二连杆和第三连杆固定连接,拉簧处于拉伸状态,变形驱动机构与第二连杆相抵。
10、进一步地,变形驱动机构包括第四支撑框、第二单轴舵机、传动齿轮、齿条和第四连杆,第四支撑框设于无人机甲板上,第二单轴舵机设于第四支撑框顶部,传动齿轮和齿条均设于第四支撑框和无人机甲板之间,传动齿轮转动设于第四支撑框上,第二单轴舵机的输出轴与传动齿轮的内齿啮合,齿条设于传动齿轮两侧并与传动齿轮的外齿啮合,齿条与第四支撑框滑动连接,两个齿条上均设有第四连杆,两个第四连杆分别与两个第二连杆抵接。
11、进一步地,控制系统包括固定在中央支撑框上的主控板和设于主控板上的电源、主控制器、电机驱动模块、通讯模块、变形模块、光电转化模块、稳压电源模块、舵机驱动模块,主控制器与电源电性连接,电机驱动模块、通讯模块、变形模块、光电转化模块、稳压电源模块和舵机驱动模块均与主控制器电性连接,电机驱动模块、通讯模块、变形模块、光电转化模块和舵机驱动模块均与稳压电源模块电性连接,电机驱动模块设有两个,两个直流电动机与两个电机驱动模块分别电性连接,第二单轴舵机与变形模块电性连接,第一单轴舵机与舵机驱动模块电性连接。
12、基于上述两栖子母球形机器人的具体结构,本发明还提供了一种两栖子母球形机器人的作业方法,其包括以下步骤:
13、s1、通过行走控制装置和重心控制装置将两栖子母球形机器人投放至预定侦察区域,然后启动变形装置打开外壳。
14、s2、启动母机侦察装置和子机侦察装置进行侦察作业。
15、s3、子机侦察装置将侦察到的画面和信息实时传输回两栖子母球形机器人,两栖子母球形机器人再将收到的信息传输给远程控制端。
16、s4、远程控制端控制子机侦察装置返回至两栖子母球形机器人上空,然后子机侦察装置自动降落至外壳内。
17、s5、启动变形装置关闭外壳,完成侦察作业。
18、本发明具有以下优点:
19、1、本发明的两栖子母球形机器人通过行走控制机构可实现前进和后退,通过重心控制装置可改变球形机器人的重心,进而配合行走控制机构实现转向,同时通过重心调整可维持整个球形机器人处于平稳状态,避免球形机器人发生晃动,进而可在陡坡等非水平地面上放飞、回收无人机,提升了球形机器人的环境适应能力。
20、2、本发明通过一个球形机器人可以携带单个或多个无人机,并将球形机器人用作无人机放飞、回收、补给的“航空母舰”,进而实现一舰多机的功能,不仅增大了两栖子母球形机器人的实际作业范围,且相较于传统可变形飞行的球形机器人,具有体积小、质量轻、机动性高、隐蔽性强、续航持久等诸多优点。
21、3、本发明的两栖子母球形机器人的侦察功能以无人机为主、球形机器人为辅,在执行侦察作业时,支持同时放飞多个无人机和将无人机群共同采集到的数据信息一同回传给具有中继作用的球形机器人,而后球形机器人再将数据信息回传给远程操作端,最后由远程操作端进行数据整合即可构建起由无人机群和球形机器人二者相互联结而建立起的立体、全面的信息网络体系,相较于传统球形机器人的侦察功能的局限性,本发明的侦察手段具有快速性、高效性、多样性等诸多优势。
22、4、本发明的两栖子母球形机器人既具备太阳能充电功能也具备无人机充电功能,不仅使得球形机器人的作业范围和作业时间得到大幅度的拓展和提升,还使其不仅适合应用于军事侦测,也适合应用于森林火情监测、海洋搜救、城市消防、震后救灾、地质勘探等诸多场合。
- 还没有人留言评论。精彩留言会获得点赞!