一种无人机自动归中智能机库的制作方法
本发明涉及机库等构筑物,尤其是涉及一种无人机自动归中智能机库。
背景技术:
1、目前,无人机智能机库即无人机智能机巢,它是无人机远程精准起降平台,是无人机稳固的“家”,机巢与智慧巡检机群作业控制中心互联互通,实现自动储存无人机、智能自动充电、状态实时监控、自动传输数据等功能。
2、在实际使用过程中,无人机从外部飞入机库后需要对无人机进行准确的定位以实现无人机充电或者更换电池等功能,但是目前的无人机机库内多采用机械手对无人机进行搬运,这样就需要在无人机机库内预留机械手的活动空间,不仅造成了无人机机库的体积较大,还会提升无人机机库的成本。
技术实现思路
1、本发明的目的在于提供一种无人机自动归中智能机库,以解决现有技术中存在的至少一个上述技术问题。
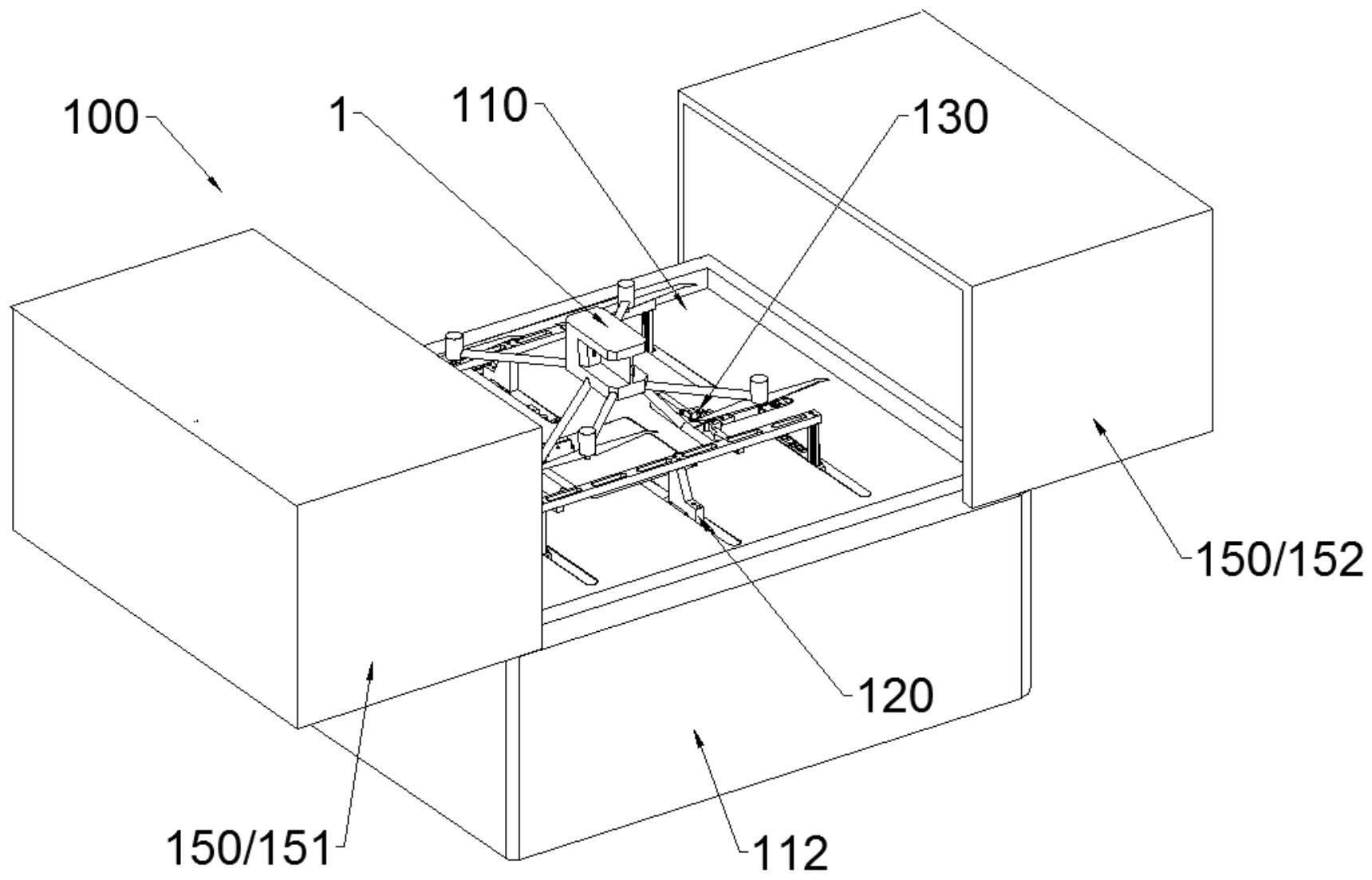
2、为解决上述技术问题,本发明提供的一种无人机自动归中智能机库,包括:降落平台、第一顶推定位机构和第二顶推定位机构;
3、所述降落平台中心设置有用于对无人机进行充电和/或检修的操作工位;
4、所述第一顶推定位机构包括:第一驱动机构和第一顶推板;
5、所述第一驱动机构用于迫使所述第一顶推板沿x轴方向移动;
6、所述第二顶推定位机构包括:第二驱动机构和第二顶推板;
7、所述第二驱动机构用于迫使所述第二顶推板沿y轴方向移动;
8、所述第一顶推板和所述第二顶推板分别布设在所述降落平台上方,用于迫使降落在所述降落平台上的无人机移动到所述操作工位上。
9、本技术中,为了叙述方便,将水平面内相互垂直的两个方向分别定义为x轴方向和y轴方向,x轴方向和y轴方向的交汇点称为原点。
10、进一步地,所述x轴方向和y轴方向的交汇点称为原点,原点布设在所述操作工位中心位置。
11、进一步地,所述第一顶推板的数量为两个,两个所述第一顶推板对称布设在所述操作工位的两侧;
12、所述第一驱动机构同步带动两个所述第一顶推板相向或反向移动,即第一驱动机构同步带动两个所述第一顶推板向靠近或远离所述操作工位方向移动。
13、当所述第一驱动机构同步带动两个所述第一顶推板相向移动时,两个第一顶推板可使得无人机在x轴方向上移动到操作工位的设定位置。
14、进一步地,所述第二顶推板的数量为两个,两个所述第二顶推板对称布设在所述操作工位的两侧;
15、所述第二驱动机构同步带动两个所述第二顶推板相向或反向移动,即第二驱动机构同步带动两个所述第二顶推板向靠近或远离所述操作工位方向移动。
16、当所述第二驱动机构同步带动两个所述第二顶推板相向移动时,两个第二顶推板可使得无人机在y轴方向上移动到操作工位的设定位置。
17、进一步地,所述第一驱动机构设置在所述降落平台的下方,所述降落平台上设置有与x轴方向平行的第一滑槽;
18、还包第一连接翼板,所述第一连接翼板的下端与所述第一驱动机构连接,所述第一连接翼板的上端穿过所述第一滑槽与所述第一顶推板连接。
19、进一步地,所述第二驱动机构设置在所述降落平台的下方,所述降落平台上设置有与x轴方向平行的第二滑槽;
20、还包第二连接翼板,所述第二连接翼板的下端与所述第二驱动机构连接,所述第二连接翼板的上端穿过所述第二滑槽与所述第二顶推板连接。
21、优选地,所述第一滑槽的槽宽和第一连接翼板厚度或宽度适配,形成用于限定第一顶推板位置精度的定位和导向结构。
22、同理,所述第二滑槽的槽宽和第二连接翼板厚度或宽度适配,形成用于限定第二顶推板位置精度的定位和导向结构。
23、可选择地,还包括用于所述第一顶推板移动时定位和导向的第一导向定位结构,第一导向定位结构优选地包括设置在所述降落平台上的第一导向槽,第一导向槽内可滑动地设置有第一导向块,第一导向块通过中间连接件(杆或板)与第一顶推板固定连接。
24、更为优选地,两个第一导向定位结构布设在第一连接翼板的两侧;两个第二导向定位结构布设在第二连接翼板的两侧。
25、同理,可选择地,还包括用于所述第二顶推板移动时定位和导向的第二导向定位结构,第二导向定位结构优选地包括设置在所述降落平台上的第二导向槽,第二导向槽内可滑动地设置有第二导向块,第二导向块通过中间连接件(杆或板)与第二顶推板固定连接。
26、优选地,所述第一驱动机构为电动伸缩机构,每个第一顶推板配置一个电动伸缩机构,电动伸缩机构通常包括电动马达和电动导轨,电动马达带动电动导轨上的滑块移动,而滑块通过第一连接翼板与第一顶推板固定连接。
27、同理,所述第二驱动机构为电动伸缩机构,每个第二顶推板配置一个电动伸缩机构,电动马达带动电动导轨上的滑块移动,而滑块通过第二连接翼板与第二顶推板固定连接。
28、进一步地,所述第一驱动机构包括:顶推步进电机、以及啮合配合的圆柱齿轮和第一齿条;所述顶推步进电机的动力输出轴与所述圆柱齿轮固定连接,第一齿条通过第一连接翼板与所述第一顶推板连接;
29、所述第二驱动机构包括所述顶推步进电机、以及啮合配合的所述圆柱齿轮和第二齿条;第二齿条通过第二连接翼板与所述第二顶推板连接;
30、两个所述第一顶推板对应连接的两个第一齿条与两个所述第二顶推板对应连接的两个第二齿条在周向上依次交错地与所述圆柱齿轮啮合,进而使得所述顶推步进电机带动所述圆柱齿轮转动时,迫使两个所述第一顶推板和两个所述第二顶推板同步靠近或远离中间的所述操作工位。
31、进一步地,还包括用于遮盖无人机的壳体,壳体整体呈倒扣的矩形盒体状;壳体包括左半壳和右半壳;左半壳和右半壳可左右对开滑动地设置在所述降落平台上。
32、进一步地,还包括与所述圆柱齿轮啮合配合的第三齿条和第四齿条;第三齿条和第四齿条分别与所述左半壳和右半壳固定连接;所述顶推步进电机带动所述圆柱齿轮转动时,迫使两个所述第一顶推板和两个所述第二顶推板同步靠近或远离中间的所述操作工位的同时,圆柱齿轮通过第三齿条和第四齿条带动所述左半壳和右半壳相向移动闭合机库或反向移动开启机库。
33、进一步地,在高度方向上,所述第一齿条、第二齿条与第三齿条和第四齿条分别布设在不同高度上,且彼此保持间隔,避免两两发生干涉。
34、优选地,所述操作工位处(或附近)设置有用于无人机充电的充电装置。
35、优选地,所述智能机库设置在无人车或有人车上,从而提高机库的机动性和灵活性。
36、优选地,所述降落平台通过缓冲安装台设置在无人车或有人车的车体上;
37、所述缓冲安装台包括:上座板和下座板;
38、所述上座板通过至少三组以上的弹性支撑组件可上下浮动地设置在下座板上;
39、所述弹性支撑组件包括:支撑杆、滑座和第一弹簧;
40、所述滑座可滑动地设置所述下座板上,所述支撑杆的两端分别与上座板和滑座铰连接;第一弹簧两端分别与滑座和下座板连接,第一弹簧被压缩趋向于迫使滑座移动进而通过支撑杆迫使上座板向上移动。
41、进一步地,三组以上的所述弹性支撑组件在以所述上座板中心为中心的周向上均匀布设。
42、进一步地,还包括第二弹簧,第二弹簧的两端分别与所述上座板和下座板连接,第二弹簧处于被拉伸状态,趋向于迫使上座板靠近下座板;第一弹簧处于被压缩状态,迫使第二弹簧保持被拉伸状态,反之,第二弹簧也迫使第一弹簧处于被压缩状态;两者协调共同作用维持着上座板可浮动地设置在下座板的上方。
43、其中,降落平台固定设置在所述上座板上;具体而言,降落平台底部四周设置有侧板(侧板将第一驱动机构和第二驱动机构等遮盖住),降落平台通过侧板固定在上座板上。而下座板可选择地连接在无人车或有人车上等。
44、进一步地,还包括可变阻尼结构,可变阻尼结构包括竖直布设在所述上座板和下座板之间的第一板条和第二板条;
45、所述第一板条的上端与所述上座板固定连接;
46、所述第二板条的下端与所述下座板固定连接;
47、所述第一板条在靠近第二板条一侧设置有卡头;所述第二板条在靠近第一板条一侧设置有卡条;多个卡条水平且间隔或紧邻布设;
48、所述卡头由硬质材料(如金属、陶瓷等)制成,所述卡条由弹性材料(如橡胶、硅胶或者塑料等)制成,所述上座板被外力压迫向下移动时,第一板条随着向下移动,卡头抵靠并滑过一个或依次滑过若干个卡条,卡条弹性变形进而产生阻尼作用。
49、进一步地,所述卡头横截面形状为刀头形状,包括下方的弧形面和上方垂直面,所述卡条横截面为半圆形;第一板条向上移动时的阻尼力大于第一板条向下移动时的阻尼力。
50、即,上座板上升时可变阻尼结构的摩擦力较大,从而上座板缓慢上升,从而避免第一弹簧和第二弹簧导致的上下晃动减震的缺陷,可实现上座板在冲击向下移动、阻尼减震后一次性缓慢恢复到平衡状态。
51、更为优选地,所述第一板条上沿高度方向间隔设置有多个所述卡头,在上座板向下移动时,与所述卡条抵触的所述卡头数量依次递增,阻尼力逐渐增大;在上座板向上移动时,与所述卡条抵触的所述卡头数量依次递减,阻尼力逐渐增小。
52、由此,阻尼力大小与第一弹簧和第二弹簧的积蓄的势能同步同趋势变化,从而更加有效地阻止或避免上座板在收到冲击后发生上下晃动,从而使得上座板更加平稳。
53、采用上述技术方案,本发明具有如下有益效果:
54、本发明提供的一种无人机自动归中智能机库, 在无人机停靠在操作工位附近后,可以快速地将无人机移动到操作工位上,进而快速地对无人机进行充电或其他维护,快捷而便利,无需使用外置机械手归中,缩小了机库体积和成本。
- 还没有人留言评论。精彩留言会获得点赞!