控制农用无人机播撒物料的方法和农用无人机与流程
本技术涉及农用无人机领域,更具体地,涉及一种控制农用无人机播撒物料的方法和农用无人机。
背景技术:
1、无人农场是人工不进入农场的情况下,采用物联网、大数据、人工智能、第五代(5th generation,5g)通信系统、机器人等新一代信息技术,通过对农场设施、装备、机械等远程控制或智能装备与机器人的自主决策、自主作业,完成所有农场生产、管理任务的一种全天候、全过程、全空间的无人化生产作业模式。
2、当前农用无人机可以应用于对无人农场中农田的播撒作业。播撒作业过程中需要对物料流速进行准确控制才能提升播撒效果。因此,如何准确的控制物料的流速成为了一个亟待解决的问题。
技术实现思路
1、本技术提供一种控制农用无人机播撒物料的方法和农用无人机,有助于实现农用无人机对物料流速的准确控制,从而有助有提升播撒效果。
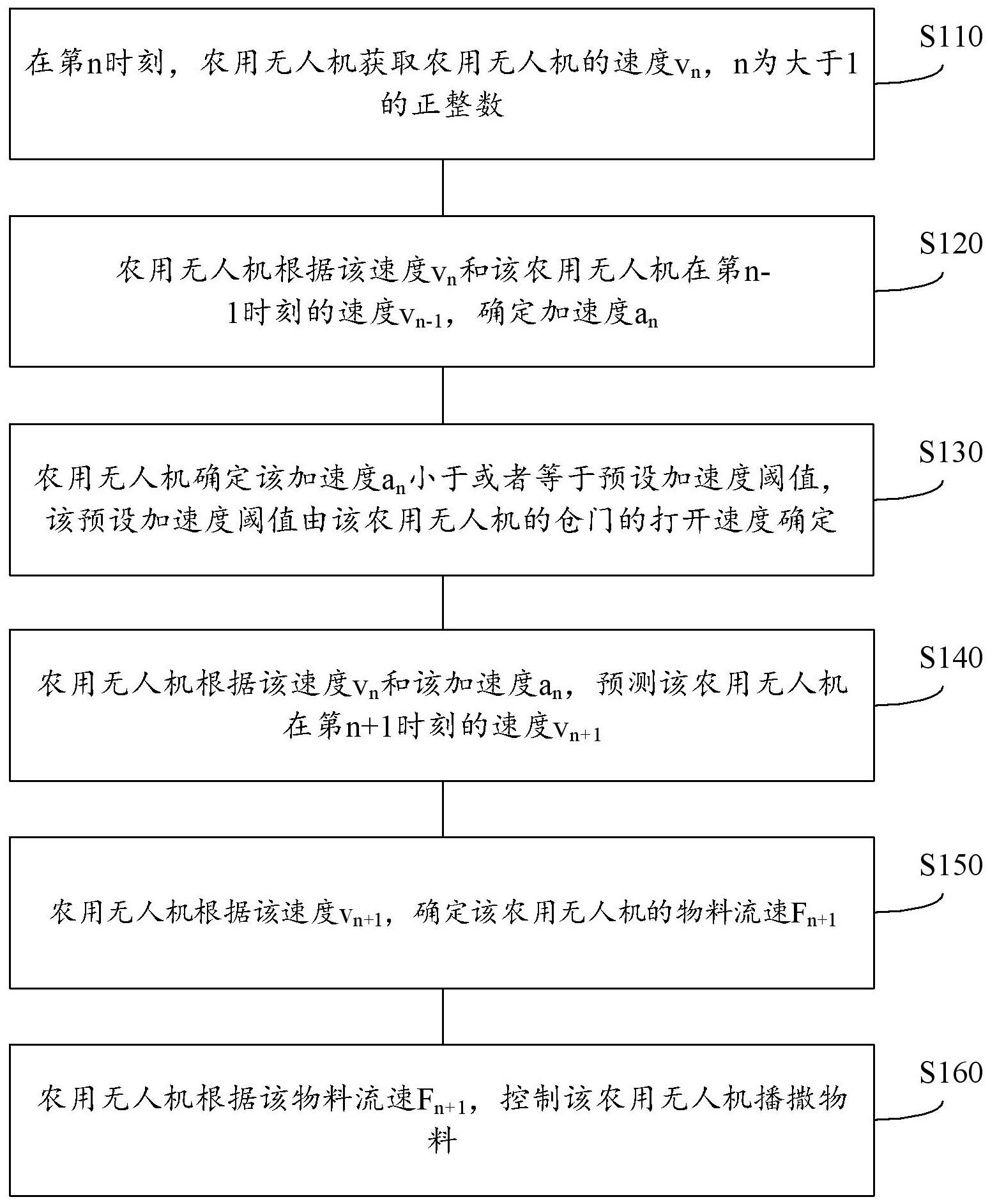
2、第一方面,本技术提供了一种控制控制农用无人机播撒物料的方法,该方法包括:在第n时刻,获取农用无人机的速度vn,n为大于1的正整数;根据该速度vn和该农用无人机在第n-1时刻的速度vn-1,确定加速度an;确定该加速度an小于或者等于预设加速度阈值,该预设加速度阈值由该农用无人机的仓门的打开速度确定;根据该速度vn和该加速度an,预测该农用无人机在第n+1时刻的速度vn+1;根据该速度vn+1和如下公式,确定该农用无人机的物料流速fn+1:该物料流速fn+1=亩用量×幅宽×该速度vn+1;根据该物料流速fn+1,控制该农用无人机播撒物料。
3、基于上述技术方案,通过对未来第n+1时刻农用无人机的速度vn+1进行预测,可以得到物料流速fn+1,进而通过该物料流速fn+1控制农用无人机播撒物料。这样,可以解决由于农用无人机的速度变化而导致物料播撒不均匀的问题。在加速度度an小于或者等于预设加速度阈值时,可以通过上述方法对农用无人机的物料流速进行控制,这样可以实现在一定的加速度变化范围内提升农用无人机对物料流速控制的准确性,从而有助于提升播撒效果和精度。
4、以上仓门打开的速度可以是固定值,不同的目标物料流速所消耗的仓门打开的时间是不同的。物料流速越快,仓门打开所消耗的时间越长。当确定目标物料流速后,就可以根据仓门的打开速度预测仓门的打开时长。农用无人机达到目标物料流速所对应的目标飞行速度所用的时长可以大于仓门的打开时长,否则物料流速就跟不上农用无人机的飞行速度。基于上述技术方案,可以通过仓门的打开速度来确定该预设加速度阈值,有助于提升农用无人机对物料流速控制的准确性,从而有助于提升播撒效果和精度。
5、结合第一方面,在第一方面的某些实现方式中,该根据该物料流速fn+1,控制该农用无人机播撒物料,包括:根据该物料流速fn+1和映射关系,确定该农用无人机的仓门开度cn+1,该映射关系包括物料流速与仓门开度的映射关系;根据该仓门开度cn+1,控制该农用无人机播撒物料。
6、基于上述技术方案,农用无人机中可以根据物料流速fn+1和映射关系确定农用无人机的仓门开度cn+1,从而控制仓门开度从cn变化至cn+1,以解决由于农用无人机的速度变化而导致物料播撒不均匀的问题,有助于实现农用无人机对物料流速的准确控制,从而有助于提升播撒效果和精度。
7、在一些可能的实现方式中,该映射关系可以为物料流速和仓门开度的对应表格,或者,也可以为物料流速和仓门开度之间的函数关系或者曲线关系。
8、结合第一方面,在第一方面的某些实现方式中,该农用无人机位于第一区域,该方法还包括:获取该第一区域的风力信息;其中,该根据该速度vn和该加速度an,预测该农用无人机在第n+1时刻的速度vn+1,包括:根据该速度vn、该加速度an和该风力信息,预测该农用无人机在第n+1时刻的速度vn+1。
9、基于上述技术方案,在对第n+1时刻的速度vn+1进行预测时,还可以结合该农用无人机所在区域的风力信息,这样可以提升对第n+1时刻的速度vn+1进行预测时的准确性,有助于提升农用无人机对物料流速控制的准确性,从而有助于提升播撒效果和精度。
10、结合第一方面,在第一方面的某些实现方式中,该方法还包括:在第n+1时刻,获取该农用无人机的速度v’n+1;根据该速度v’n+1和该速度vn,确定加速度an+1;在确定该加速度an+1大于该预设加速度阈值时,控制该农用无人机的加速度降低。
11、基于上述技术方案,在农用无人机的加速度大于预设加速度阈值时,可以控制农用无人机的加速度降低,从而使得农用无人机达到目标物料流速所对应的目标飞行速度所用的时长变长,以满足达到该目标飞行速度所用的时长大于仓门的打开时长,有助于提升农用无人机对物料流速控制的准确性,从而有助于提升播撒效果和精度。
12、第二方面,提供了一种农用无人机,该农用无人机包括速度传感器和处理器,其中,该速度传感器,用于在第n时刻,获取农用无人机的速度vn且向该处理器发送该速度vn,n为大于1的正整数;该处理器,用于根据该速度vn和该农用无人机在第n-1时刻的速度vn-1,确定加速度an;该处理单元,还用于确定该加速度an小于或者等于预设加速度阈值,该预设加速度阈值由该农用无人机的仓门的打开速度确定;该处理器,还用于根据该速度vn和该加速度an,预测该农用无人机在第n+1时刻的速度vn+1;该处理器,还用于根据该速度vn+1和如下公式,确定该农用无人机的物料流速fn+1:该物料流速fn+1=亩用量×幅宽×该速度vn+1;该处理器,还用于根据该物料流速fn+1,控制该农用无人机播撒物料。
13、结合第二方面,在第二方面的某些实现方式中,该处理器,具体用于:根据该物料流速fn+1和映射关系,确定该农用无人机的仓门开度cn+1,该映射关系包括物料流速与仓门开度的映射关系;根据该仓门开度cn+1,控制该农用无人机播撒物料。
14、结合第二方面,在第二方面的某些实现方式中,该农用无人机位于第一区域,该农用无人机还包括通信模块,该通信模块,用于获取该第一区域的风力信息;该处理器,具体用于:根据该速度vn、该加速度an和该风力信息,预测该农用无人机在第n+1时刻的速度vn+1。
15、结合第二方面,在第二方面的某些实现方式中,该速度传感器,还用于在第n+1时刻,获取农用无人机的速度v’n+1且向该处理器发送该速度v’n+1;该处理器,还用于根据该速度v’n+1和该速度vn,确定加速度an+1;该处理器,还用于在确定该加速度an+1大于该预设加速度阈值时,控制该农用无人机的加速度降低。
16、第三方面,提供了一种农用无人机,该农用无人机包括:存储器,用于存储计算机指令;处理器,用于执行该存储器中存储的计算机指令,以使得该装置执行上述第一方面中任一项所述的方法。
17、第四方面,提供了一种计算机程序产品,所述计算机程序产品包括:计算机程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第一方面中任一项所述的方法。
18、上述计算机程序代码可以全部或者部分存储在第一存储介质上,其中第一存储介质可以与处理器封装在一起的,也可以与处理器单独封装,本技术实施例对此不作具体限定。
19、第五方面,提供了一种计算机可读介质,所述计算机可读介质存储有程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第一方面中任一项所述的方法。
20、第六方面,提供了一种芯片,该芯片包括电路,该电路用于执行上述第一方面中任一项所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!